






本文章适合有一定基础的人学习如:abb,发那科,库卡等这些主流的机器人,一些通用的知识点就不在这里过多描述,只讲一下不同的地方以便快速入门接手项目。
有一定基础!!!
有一定基础!!!
有一定基础!!!
1.仿真软件Editor
1.1下载Editor2.6.05
这个软件是埃斯顿机器人的仿真软件,适合在没有机器人前期准备程序及配置的时候使用。入门学习也非常合适,毕竟也不是一直有都有机会拿实机去练习的。

仿真软件可以选择在官网下载,但是在官网下载有点问题一开始我都找不到,使用我这里先给一个截止到这一篇文章发布前最新版的连接。点🐔下载!!!
1.2官方最新版下载
进入埃斯顿官网点击资料下载见面,你会发现哎嘿!你要搜索相关的手册或者安装包的名称才能下载,输错了就找不到了!
可以跟着我输入关键字:Editor


2.界面介绍
打开软件后会需要登录一个账户,注意这里的账户指的是仿真软件的账户,不是机器人示教器里面的那个账户。
用户名:Root
密码:000000
登录后如图所示,根据以下步骤依次操作,选择相对应的机器人。
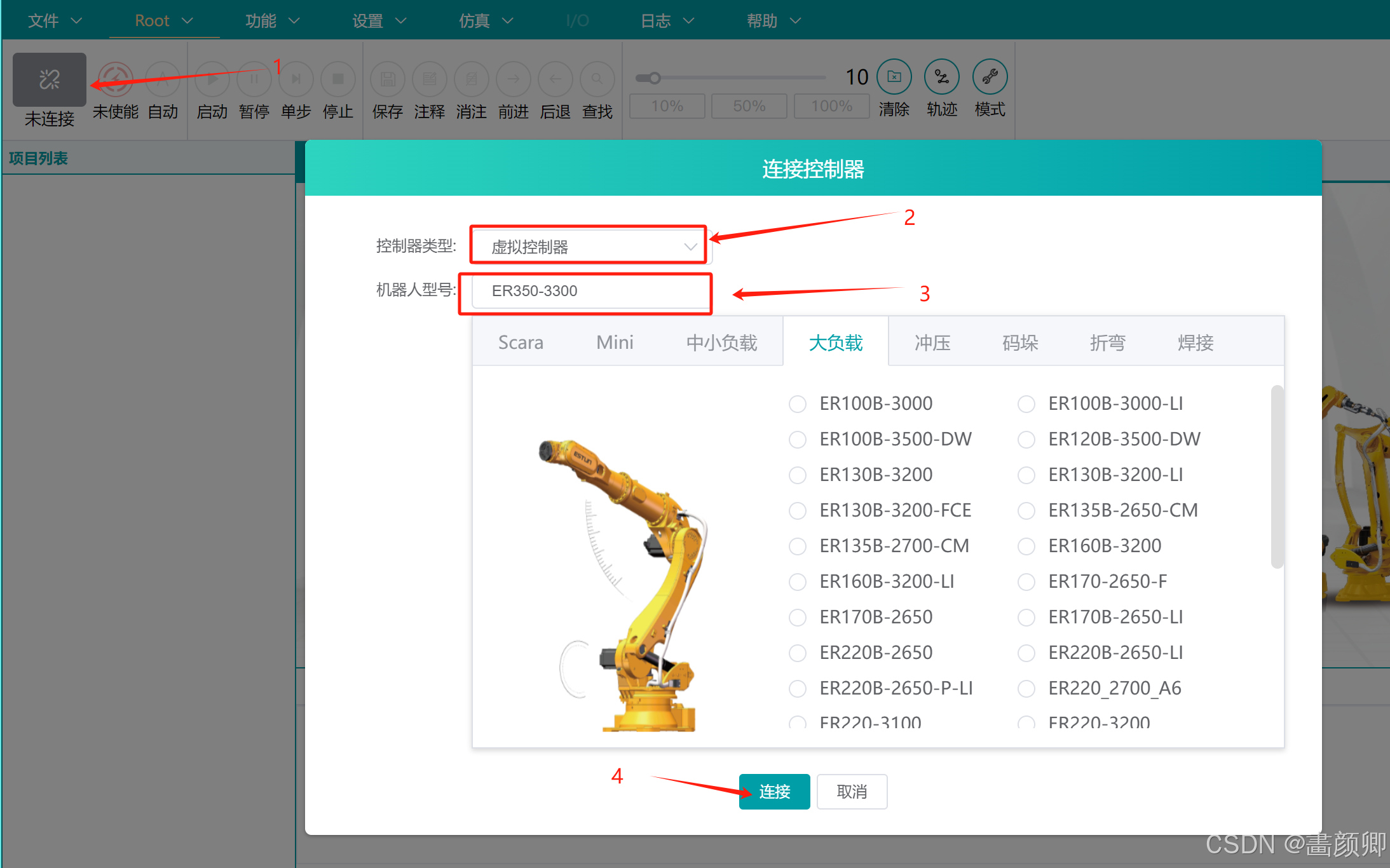
打开软件后自己到处点一点,大概看一眼都有哪些功能。相信学习能力这么强的你,一定可以哒~
熟悉得差不多了就打开示教器,国产品牌的示教器基本页面和功能都大差不差的,也是到处点点稍微熟悉一下就好了,个人感觉没有ABB发那科这些那么复杂,也不需要配置什么就可以直接使用。
值得注意的是示教器用户权限:
编程人员:111111
管理人员:000000
厂家人员:666666

3.IO配置
这里的IO配置就很方便了,不像ABB那种要配板卡和板卡里对应的地址信号。连示教器那边的配置都不用,控制柜那边会有输入输出的IO板,只要我们在物理上把信号接入就可以了。

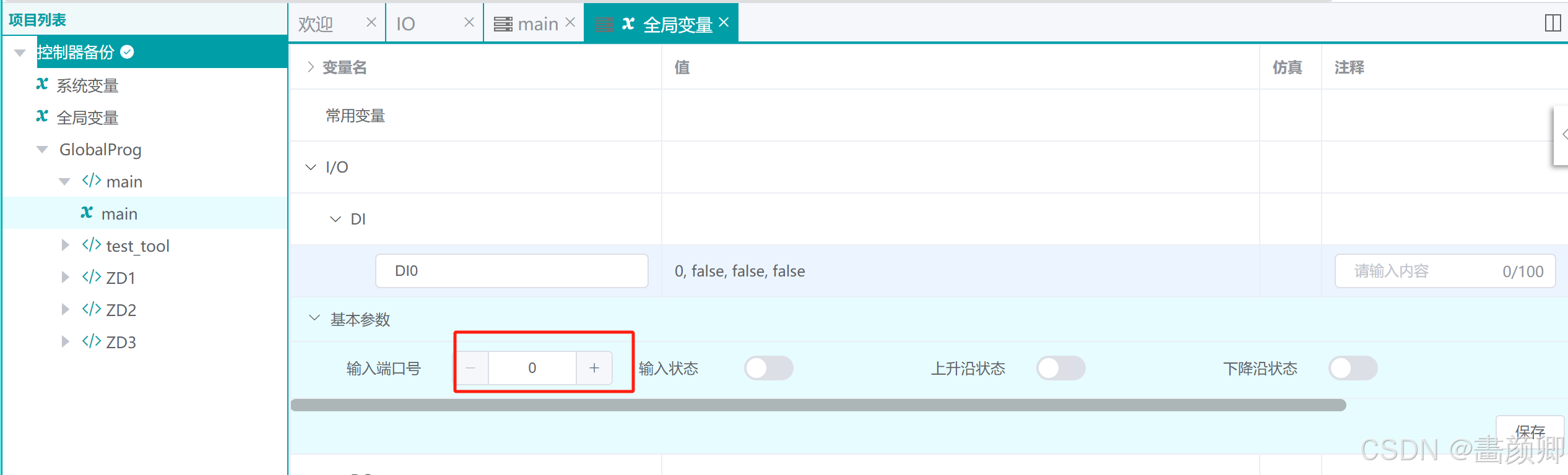
4.程序变量与语法
全局变量和局部变量字面意思就不多说了,而这里比较特别点的就是他这个IO变量。可以自定义别名和地址,就是说可以同时有多少相同地址不同别名的IO变量,这么做的目的应该就是方便了程序的移植。

变量的调用也有一些不一样,比如我新建了一个全局的整型变量PUT_PALLET1,那我给它赋值的语法如下所示。
g:代表是全局变量
L:代表是局部变量
value:是值它里面的值
g:PUT_PALLET1.value = 1
g:GET_PALLET.value = g:GET_PALLET.value - ( 1 )
当你访问一个IO变量时,也如下所示。IO变量的值得等于1或0,而不能写成true或false。当然写成true或false程序是不会报错的,但运行起来时会发现即使条件达到了它也不会往下运行。
IF (l:DI11.value == 1) THEN
SetDO(l:DO17,1)
ENDIF
接下来是一些数组的调用,建立一个点位数组GET_PALLET_POS和整型变量GET_PALLET使用时会发现有时候程序会报错而有时候又不会,我觉得应该是埃斯顿的那个仿真软件的语法检测那边有bug吧,挺奇怪的。
MovJOffset(g:GET_PALLET_POS[g:GET_PALLET.value],g:DCPOS0,"COORD",g:Grip,s:World,s:V1000,"RELATIVE",s:C100,g:Grip_PAYLOAD_Null)
MovL(g:GET_PALLET_POS[g:GET_PALLET.value],s:V100,"FINE",g:Grip,s:World,g:Grip_PAYLOAD_Null,"GOVRON")
剩下的语法部分没有太大的区别,一些基础语法跟C是差不多的,只是说表达的方式有一点不同,其他的都一样。还有一个就是关于仿真软件的所有手册和程序指令手册在软件的帮助栏里面有,这个是很重要的,在查看手册的时候我发现了一些有意思的功能(如多工位预约,主从运动,变位机设置,视觉配置等)待我有机会使用的时候,再出一篇。
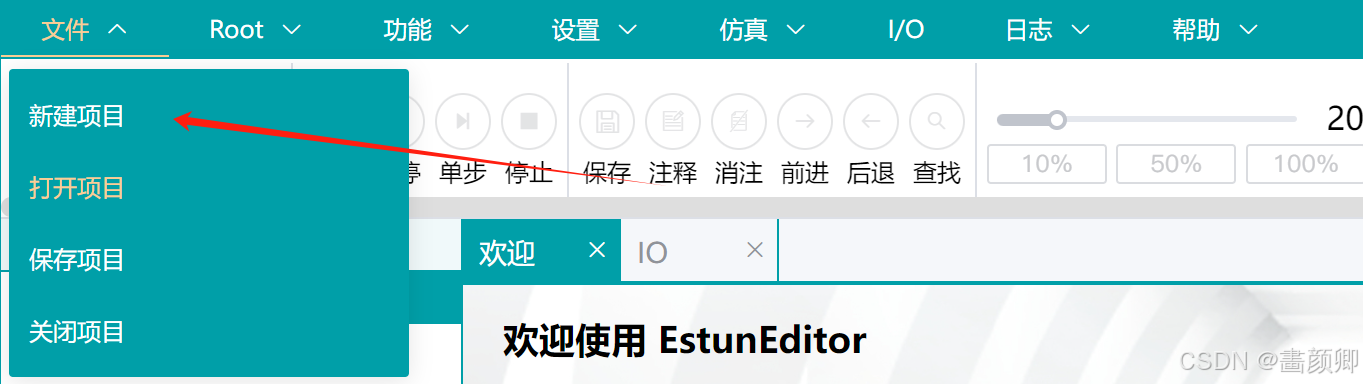
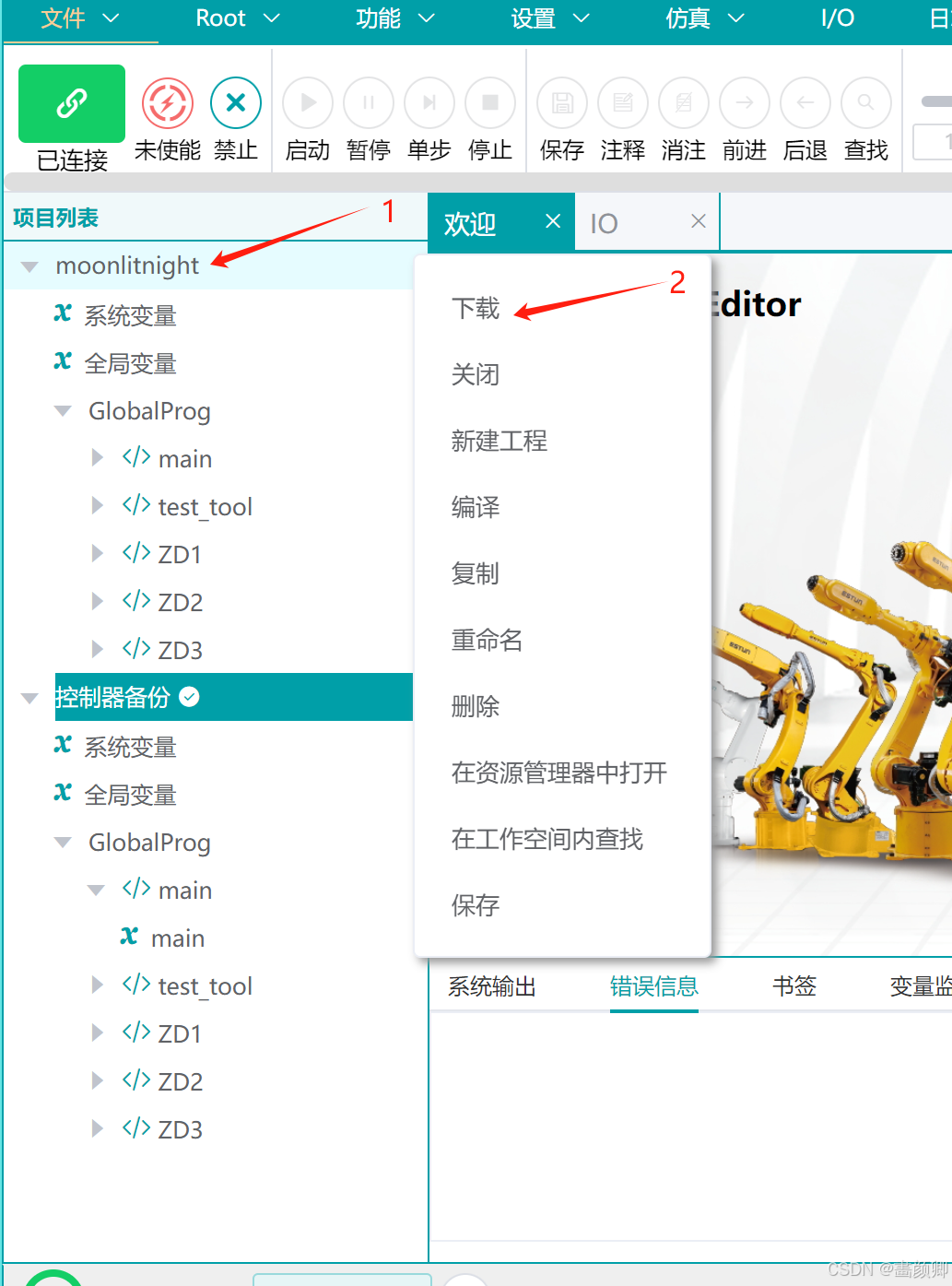
5.程序下载
使用网线接入控制柜,配置电脑IP地址使其处于同一网段。



打开仿真软件,选择实际控制器,连接对应的机器人。

新建或打开项目把写好的程序打开



















 6252
6252

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











