






 本文详细介绍了机器人坐标系的概念,包括大地坐标、基坐标、工具坐标和工件坐标,以及如何在ABB机器人中设置自定义坐标系,特别是通过方法一和四点法进行基坐标和工具坐标系的调整。
本文详细介绍了机器人坐标系的概念,包括大地坐标、基坐标、工具坐标和工件坐标,以及如何在ABB机器人中设置自定义坐标系,特别是通过方法一和四点法进行基坐标和工具坐标系的调整。
以ABB机器人为例,关于机器人的坐标系讲解其实网上有很多资料讲解,但都比较零散或者说知道什么意思却不知道怎么配置。对与初学者来说还是比较迷茫的,不过下面我会讲解机器人常用的四大坐标系具体是什么意思?具有什么意义,为什么要使用它们?怎么设置?先来个一问三连,希望你也可以一键三连。懂的都懂,不懂的也得懂!
前言
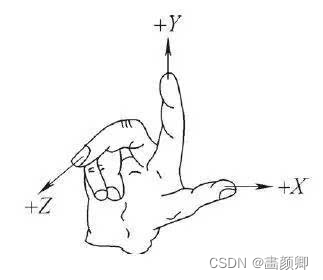
在介绍下面的坐标系之前,需要先简单的了解一下什么是笛卡尔坐标系。笛卡尔坐标系应用的地方很广,在很多领域上都有应用如:几何数学,地理信息系统,计算机图形学,数据分析,机器人学等等都是非常重要的。
下面是标准笛卡尔坐标系所指方向。现在请伸出你的右手,摆出下图一样的姿势,Z轴正方向朝自己的正前方。
在一个三维空间里面,它的原点可以在任何方向,但是三个轴的关系是不变的。
比如:我想让Y轴绕左手边旋转90度,那在你的想像中X和Z的正方向应该是怎么样的呢?
结果是
X:朝向自己的正前方(原来Z的方向)
Y:不变
Z:朝向自身的左手边
怎么样?跟你想的一样吗?上面说的可能还是比较抽象,也只是一个简单的例子。但经过下面的实操,你会有更深的理解以及不同的使用方法。
机器人坐标系之间的关系
这个差不多是所有坐标系之间的依赖关系。自定义的工具坐标是根据tool0去进行偏移的。
1.大地坐标系
大地坐标也可以叫作世界坐标,大地坐标系是以大地作为参考的直角坐标系,在不同的情况下大地坐标的位置是不同的。机器人的大地坐标范围很广,可以是指机器人对于一个工作站的位置。那么一个工作站或者说是生产线肯定不止一台机器人或一个控制柜,对于单个控制柜的系统来说它的大地坐标只存在于单台或多台机器人之间有且只有一个,不能表现于整个工作站。在ABB机器人中,大地坐标是不能修改也没必要修改。用不上!知道概念就好了。
下面讲的就是单个控制柜对于单台或多台机器人,大地坐标的位置。
A. 一台机器人正装:大地坐标与基坐标重合
B. 一台机器人倒装:大地坐标与基坐标重合
C. 两台机器人:无论两台机器人是正装还是倒装,或者是一正一倒,大地坐标的位置处于第一台机器人的基坐标位置
D. 一台机器人加导轨:位于导轨零点,机器人底部基坐标位置
E. 多台机器人加多个导轨:以系统默认的第一台机器人基坐标位置
记住,基坐标会跟导轨的移动而变化而大地坐标不会,即使一开始与基坐标的位置是相同的。
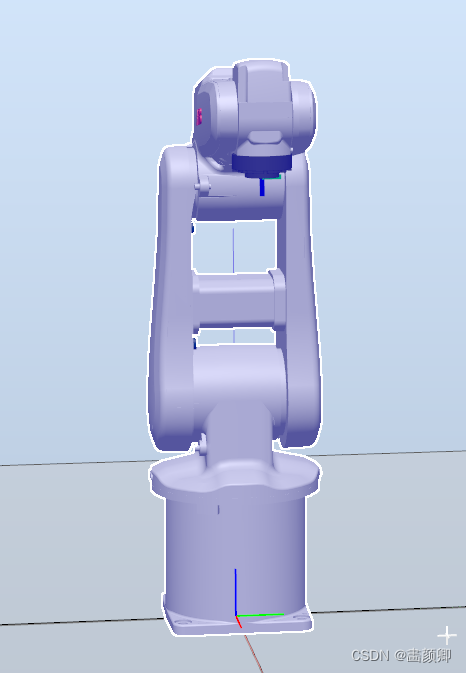
2.基坐标系
基坐标系是以机器人安装基座为基准、用来描述机器人本体运动的直角坐标系。它的主要作用是提供一个稳定的参考框架,以便机器人可以确定自己的位置、方向和姿态。通过基座坐标系,机器人可以更容易地执行任务、导航和与环境互动,因为它提供了一个不会随机器人移动而改变的基准。
一般情况下基坐标跟大地坐标是在同一个位置,都在机器人的基座中心且不需要修改。
X+:红色
Y+:绿色
Z+:蓝色
上面是一般情况,那二班呢?抱歉!没有二班!
二搬情况就是机器人的安装位置不是正装的,而是倒装或者是斜着安装的那怎么办?(凉了呗~)
修改基坐标有两种方法,不过一般都是用第一种,方便也好做。
方法一
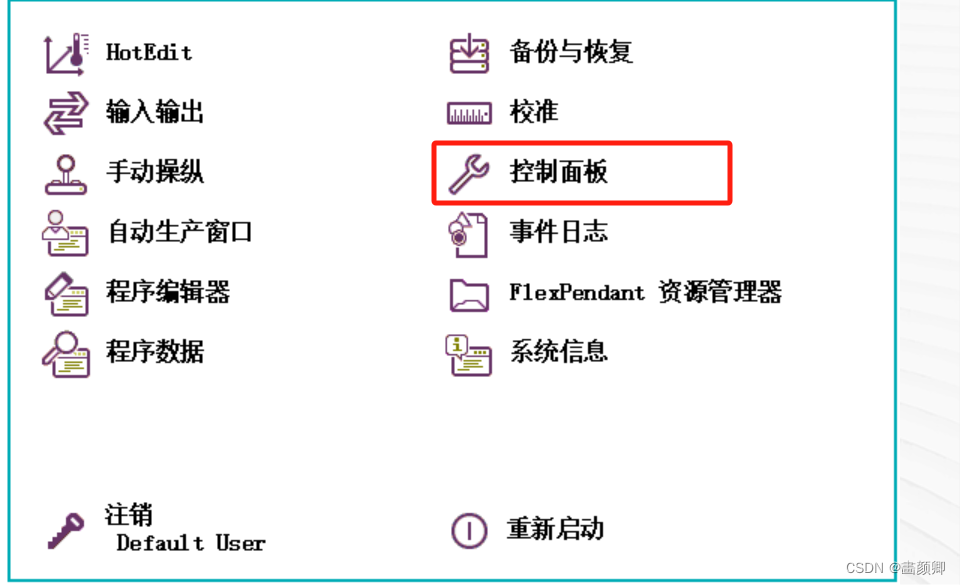
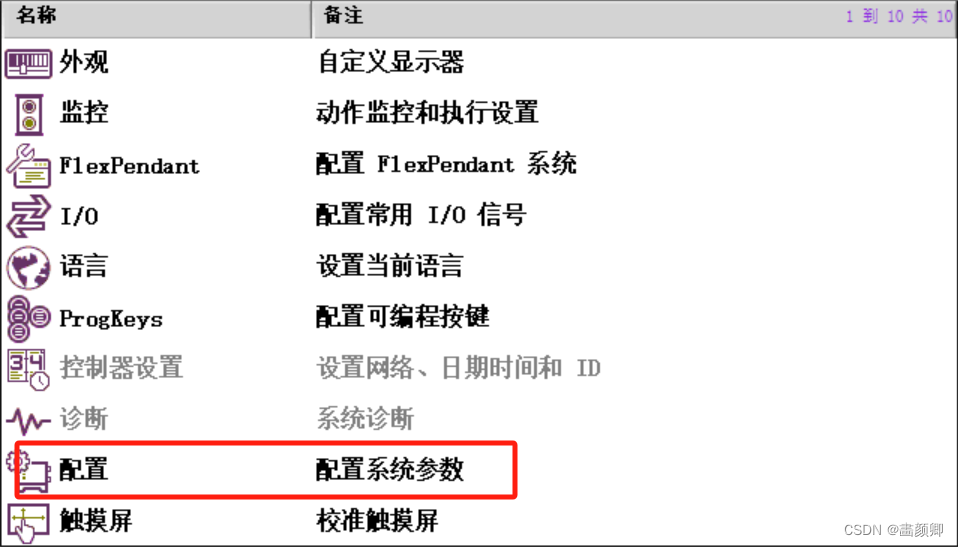
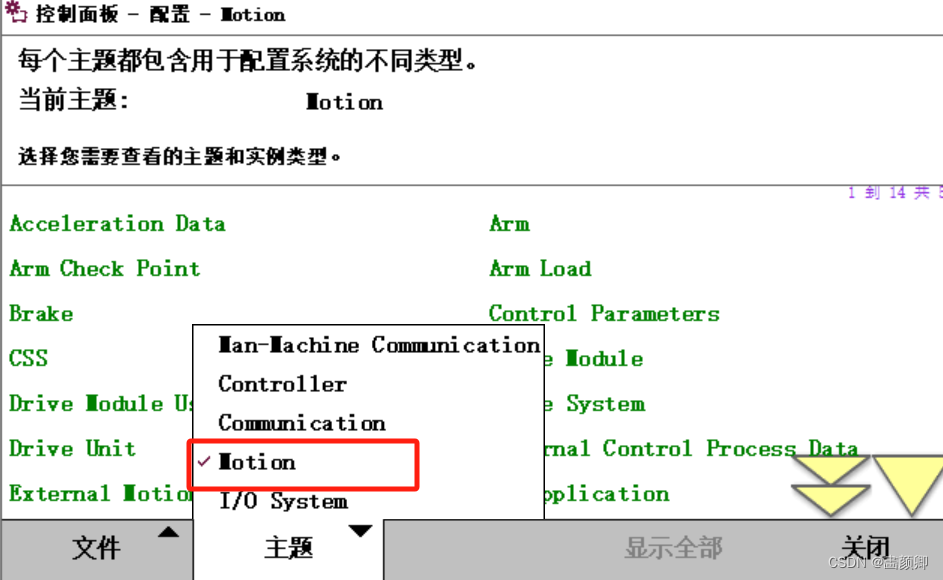

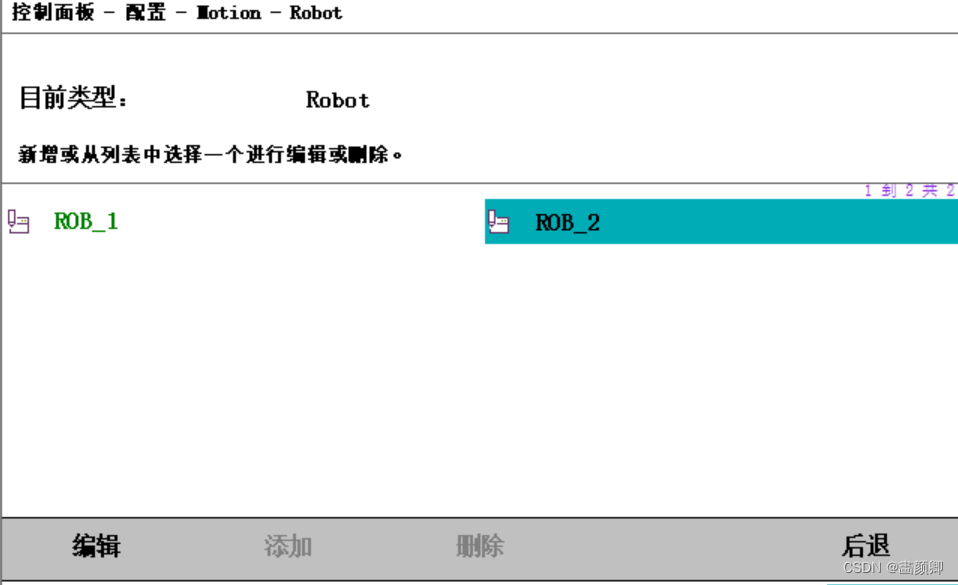
配置需要倒装的机器人,我这里有两个机器人一个是正装的,另一个是倒装的,我选择倒装的那一台。
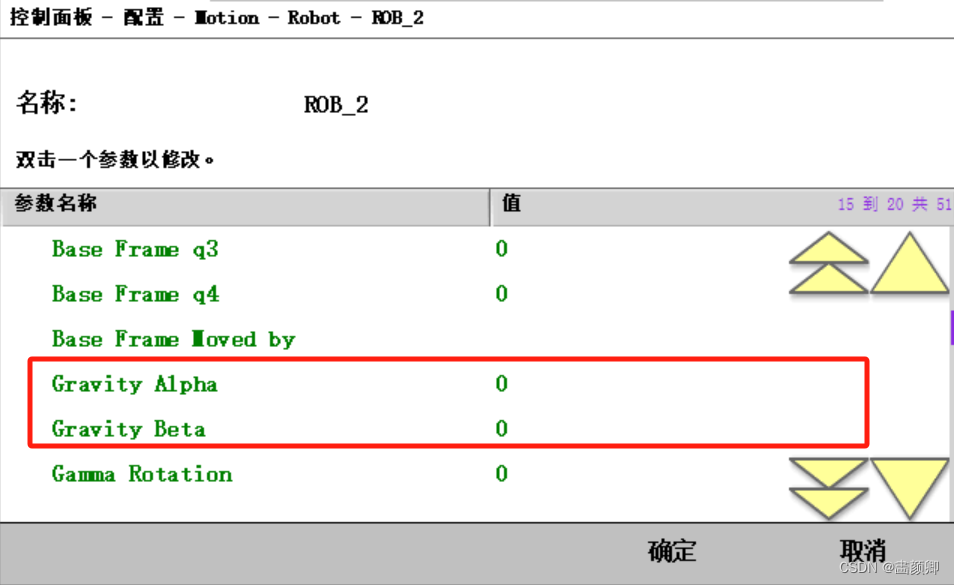
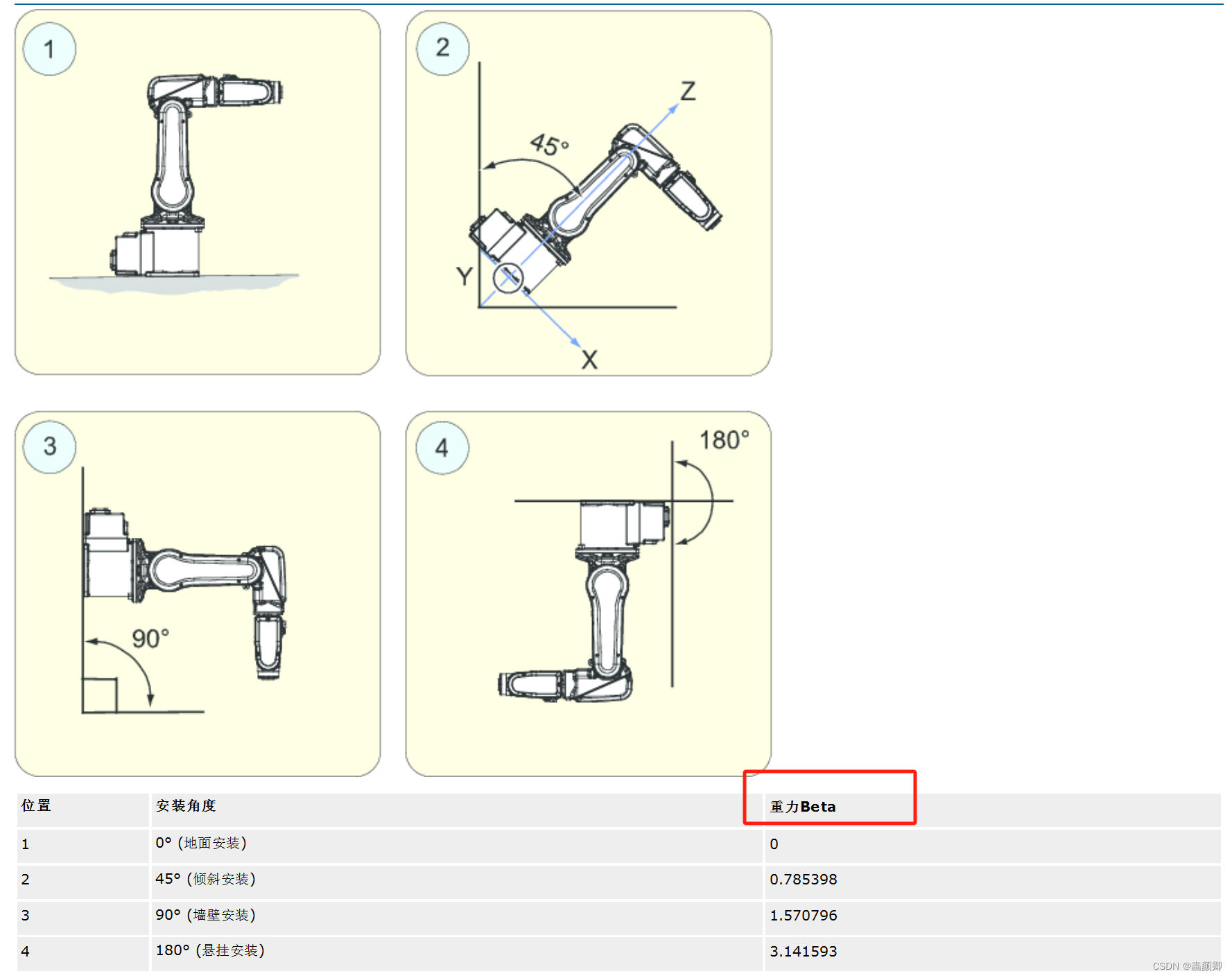
下面的参数是修改基坐标与大地坐标之间的位置关系,以米为单位。上面也说过,两台机器人它的大地坐标是以第一台机器人的基坐标为基准的,这里配置的是第二台机器人,所以我这里的XY是有值的,代表ROB_2的基坐标与大地坐标之间的距离。在robot studio里面这个距离会给你自动分配,但是真实机器人中需要我们自己去测量定义ROB_2的基坐标位置。当然单台机器人就不用怎么麻烦了,只要定义一下重力方位就好啦~

Gravity Alpha:是相关机器人绕基本坐标系中X轴的正旋度,以此来定义相对于重力的机器人方位
Gravity Beta:是相关机器人绕基本坐标系中Y轴的正旋度,以此来定义相对于重力的机器人方位
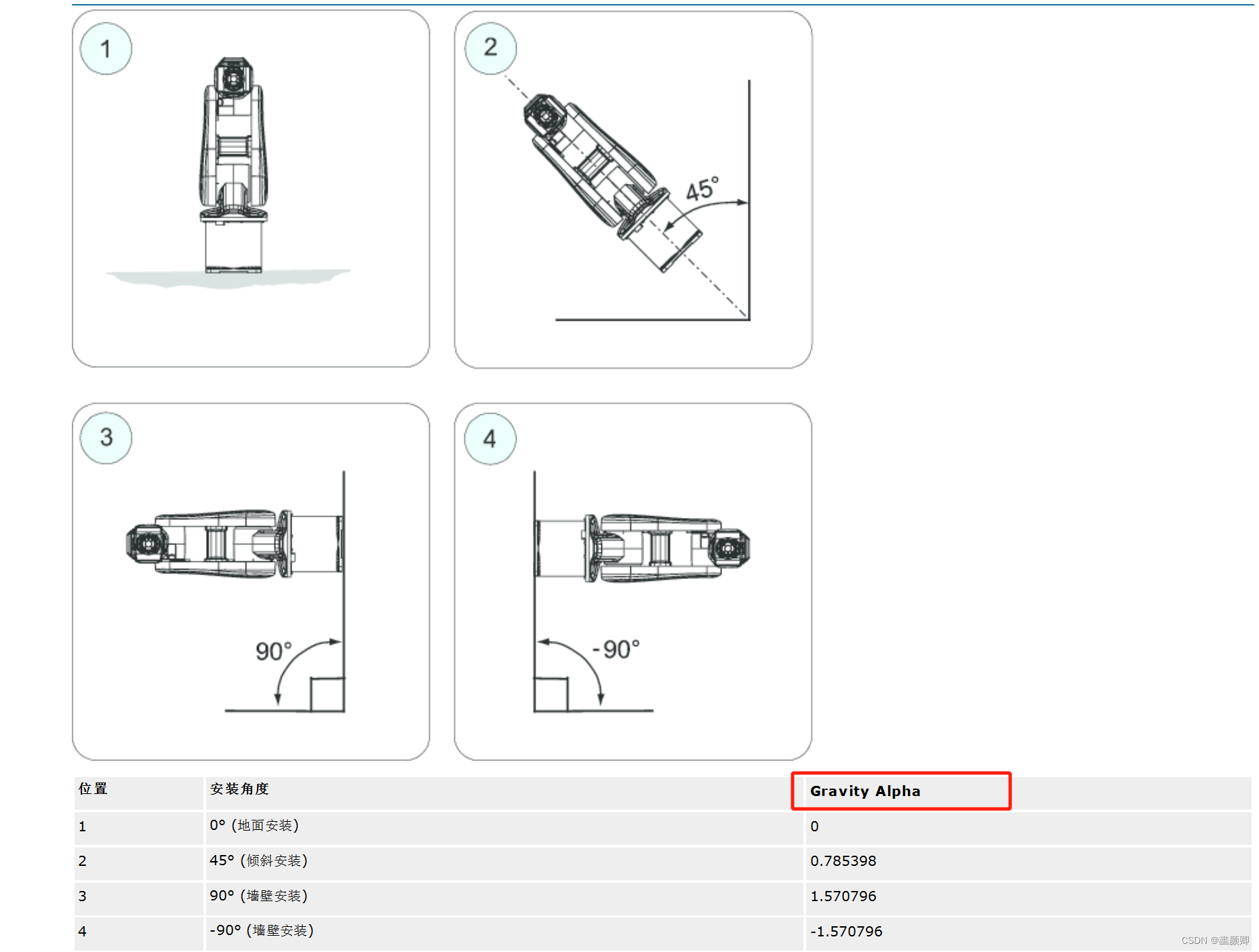
这是具体参数设置
Gravity Alpha = A° x 3.141593/180 = B 弧度,其中A为以度为单位的安装角度,B为以弧度为单位的安装角度。
Gravity Beta = A° x 3.141593/180 = B 弧度,其中A为以度为单位的安装角度,B为以弧度为单位的安装角度。
修改完成,重启机器人就好了。
方法二

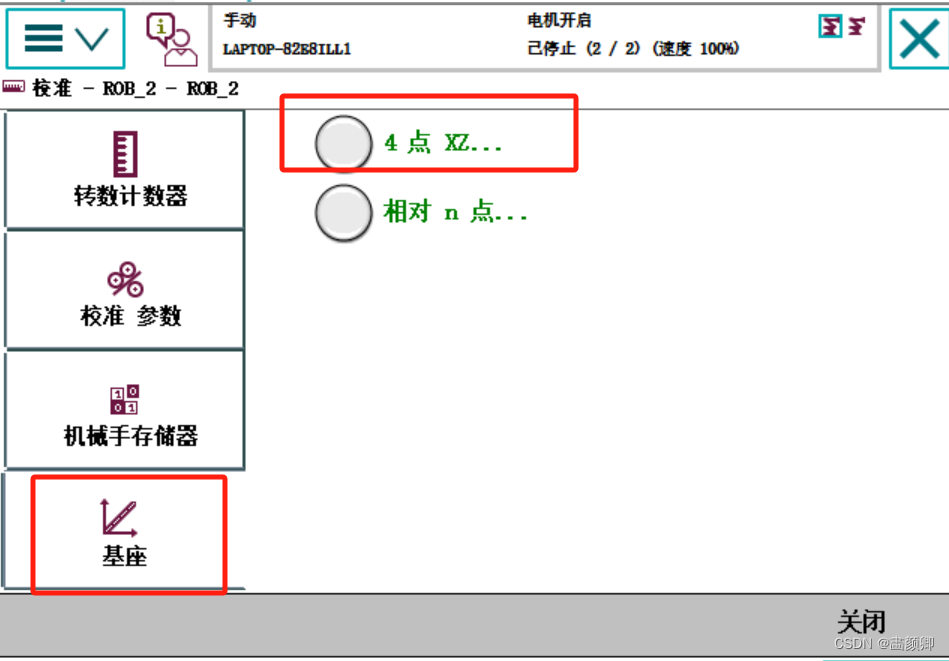
然后通过四点方法去进行定义。什么是四点法,下面讲。定义工具坐标和工件坐标都会用到四点法。
3.工具坐标系
我们经常使用工具坐标系,那么小白就会问了。为什么用建立工具坐标系,我直接用默认的不就好了吗?
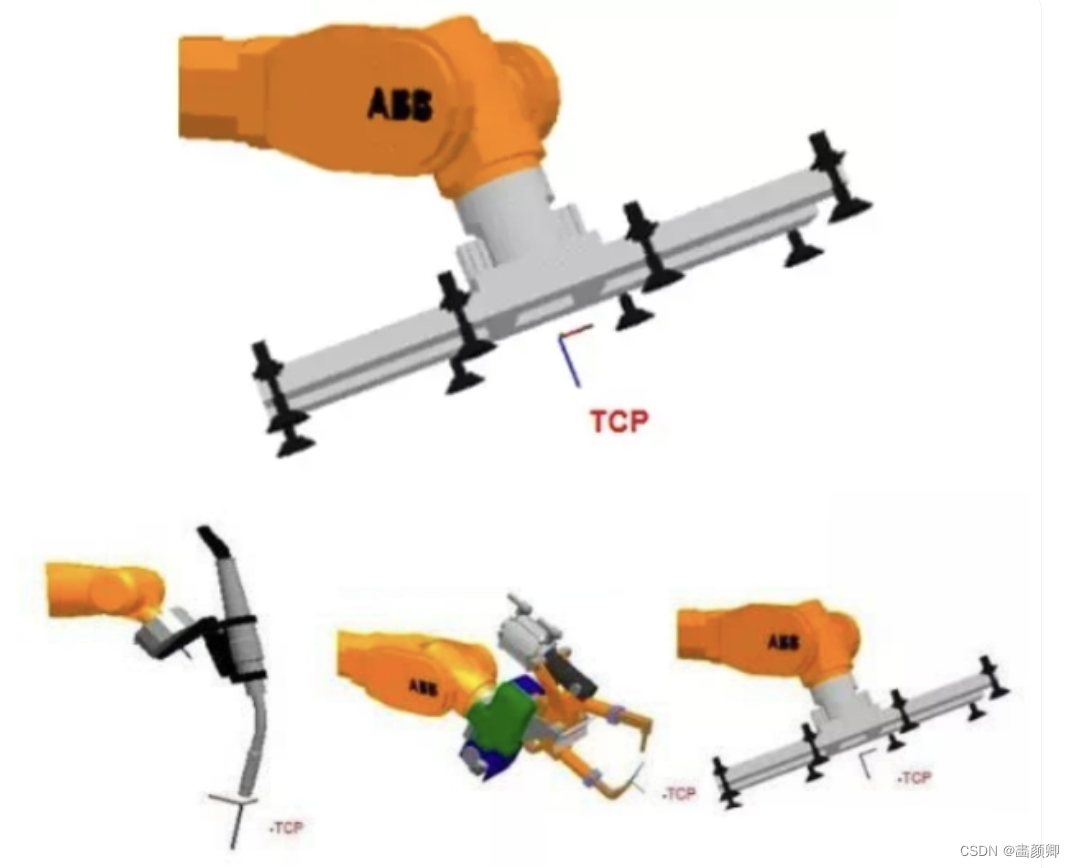
NO! NO! NO! 在实际生产中往往一台机械手需要用到吸盘、焊枪、气缸等工具。那如果不做工具坐标,在同一个点位,那就得记录三个位置数据,一个数据代表一个工具。是不是很麻烦?而且每个工具的重量都不同,对于机器人的负载也不同。不做工具坐标的话,机器人就不知道它拿的东西有多重?不同的负载机器人的加速度、转动惯量是不同,这也是一个影响我们生产安全与机器人使用寿命的一个因素。
tool0是默认的工具坐标,它位与六轴法兰盘中心位置。
一个标准的工具坐标系需要知道XYZ框架的位置和工具的重量。
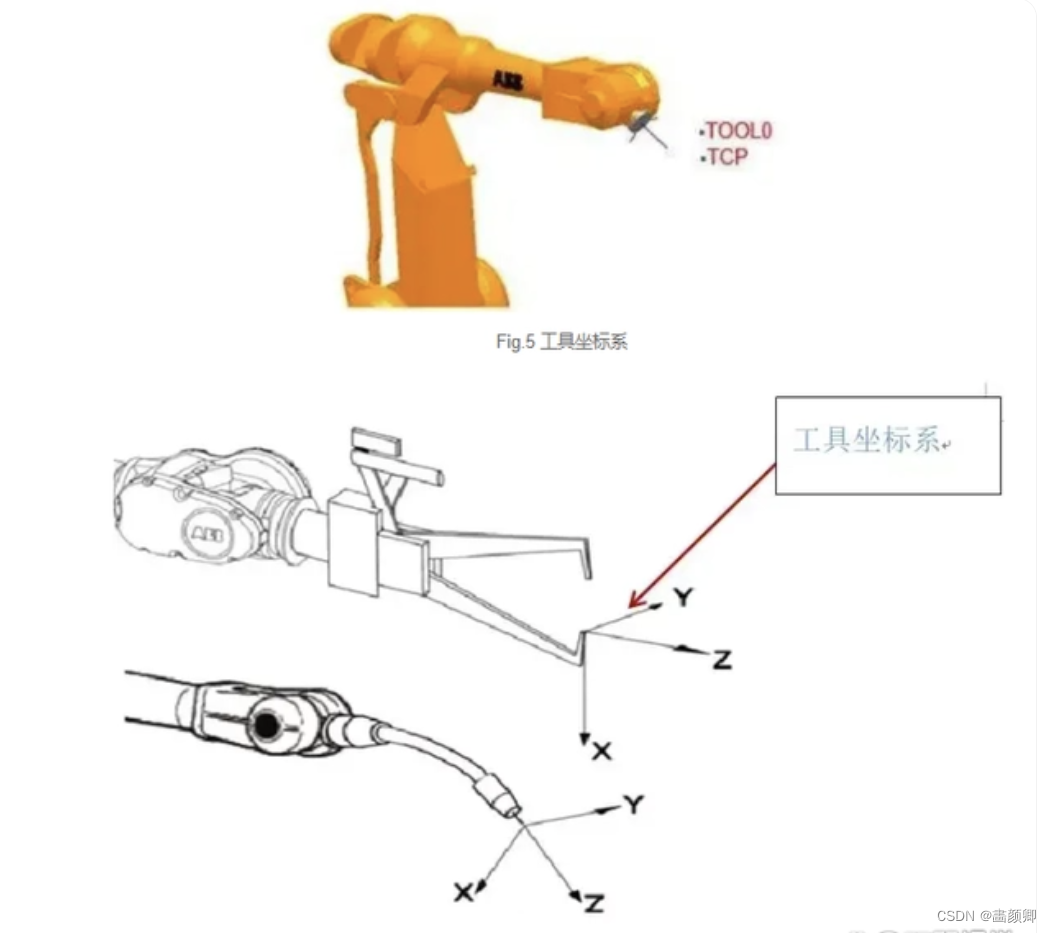
工具坐标系大概就是上面这个样子,那我们要怎么定义呢?(鬼知道哦~)

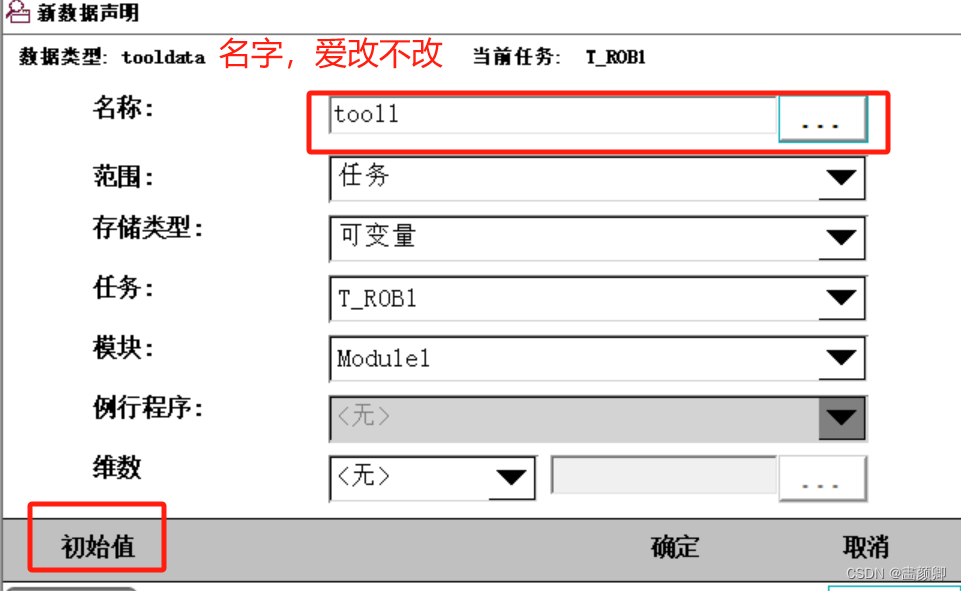
往下翻找到这个mass,它就是你的工具重量单位是kg,根据实际情况去修改,反正不能是0或者负数。修改完成,点两下确定。

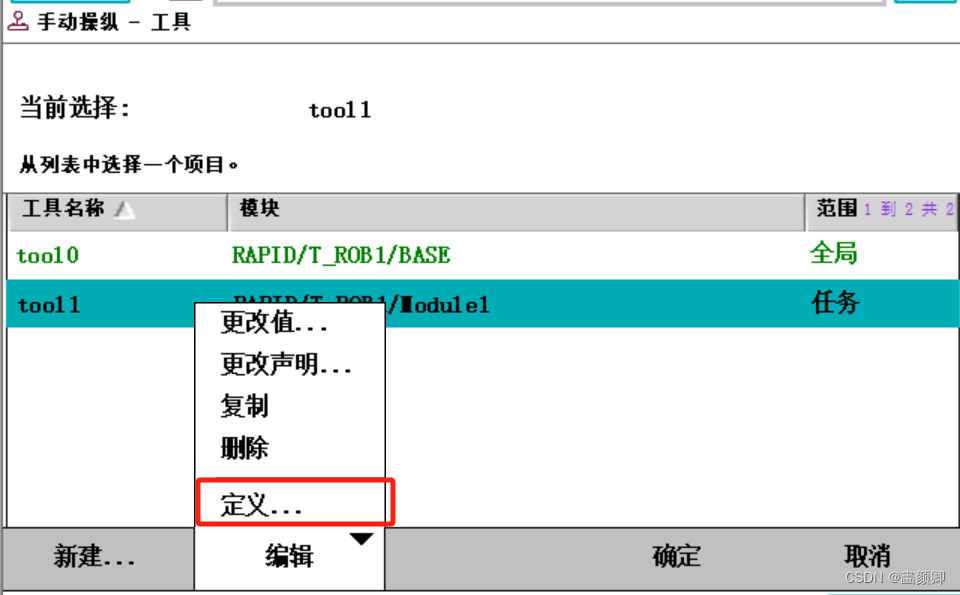
先讲四点法,然后再说如何自己定义坐标系的方向。
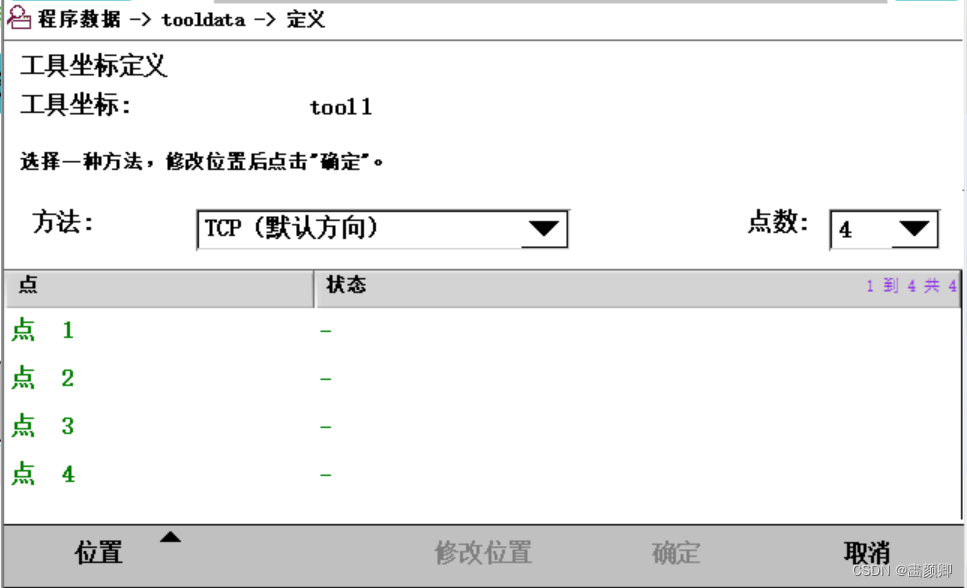
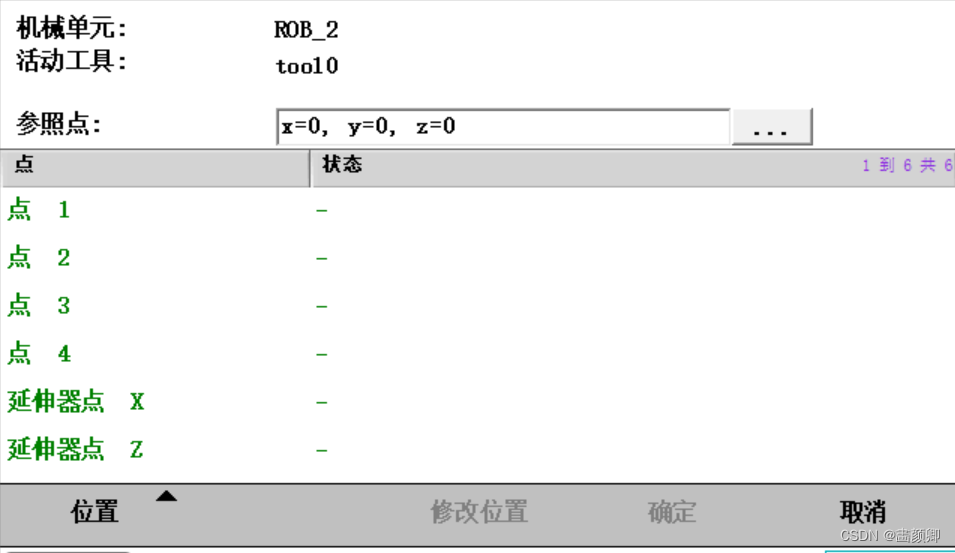
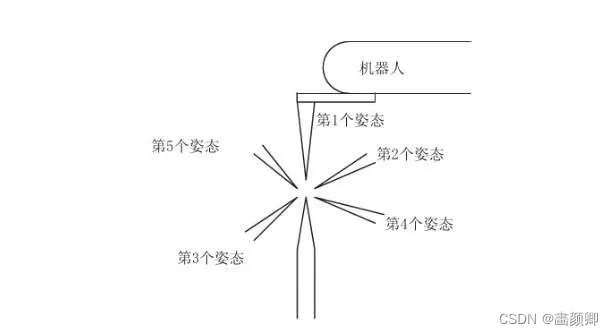
工作站上面找一个基准点,机器人的工具上也找一个基准点,机器人上的基准点就是你这个工具坐标的原点。四点法就是通过四个不同的姿态去触碰同一个点,四个位置的姿态相差越大精度越高。说人话就是用四个或多个方向让机器人的基准点与工作站上面的基准点去触碰,示教点位的数量越多越精确,工具越短越精确。
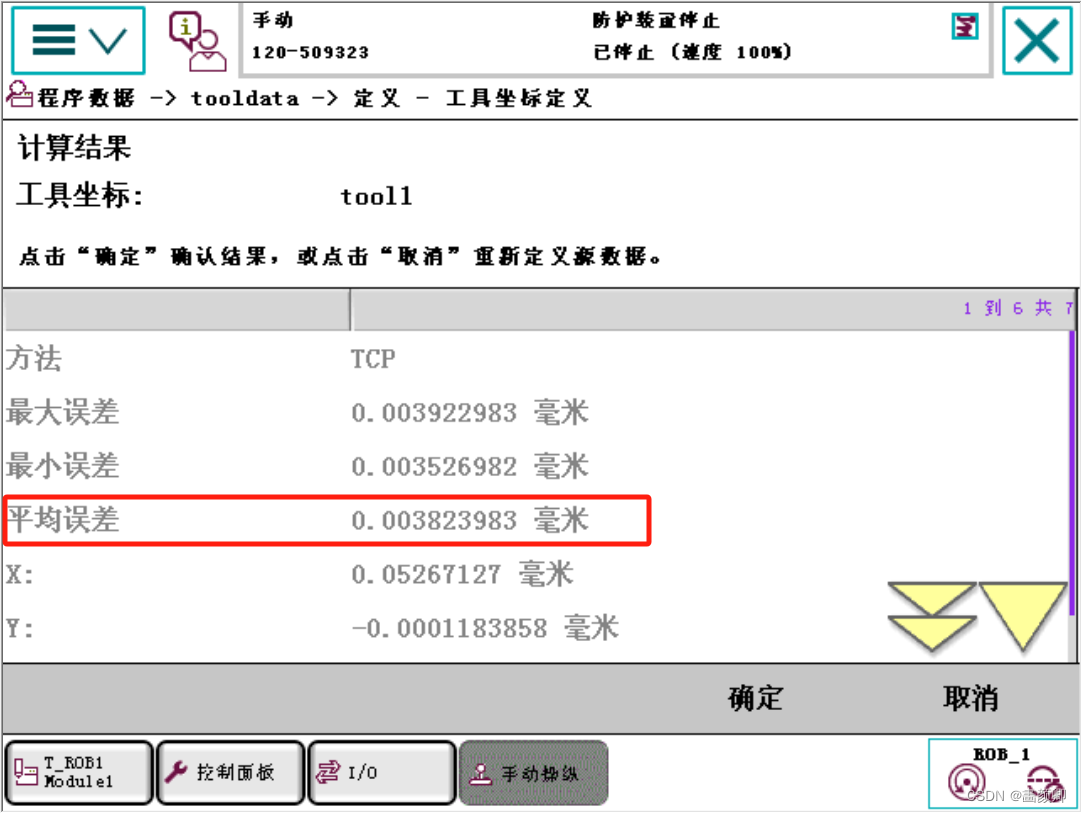
示教好之后点击确定,会出现一个界面。平均误差越小越好,一般0.5以内都是正常的,我自己通常在0.3以内。
上面是六轴机器人的方法,如果是四轴的SCARA或是码垛机器人怎么办?它们只能在一个平面去运动,不能像六轴机器人从不同的方向及角度去示教它,这里有两个方法。
方法一:通过工具的图纸进行三维建模,然后在robot studio里面去定义坐标系的位置。这个就很方便了,想定在那就定在那,六轴机器人也可以去这样做。
方法二:在一个平面上去旋转不同的角度去定义就好了,其实差不多的,一般是三点法。
建立的工具坐标系,同一个位置带相应的工具坐标,就可以直接去使用了,这很方便。在不去定义它方向的情况下,工具坐标系的方向与tool0相同。
如果你还想去自定义工具坐标系的方向(能不能别想,想这么多干嘛?好累哎!)
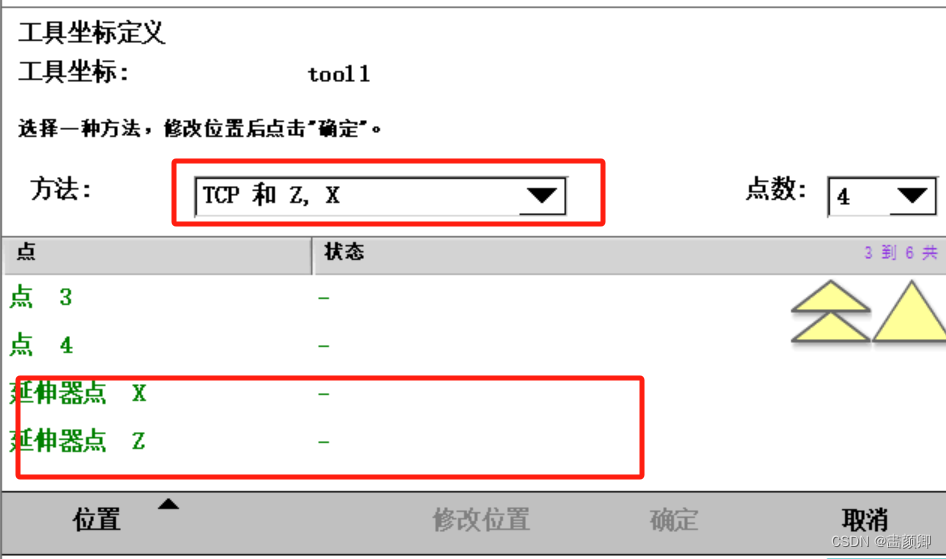
先确定好X轴和Z轴的正方向,然后重点来了。
从原点往X轴的反方向(负方向)拉一小段距离,修改位置就可以了,Z轴也是一样的。至于为什么不直接定义正方向,我也不知道(摆烂)。
4.工件坐标系
工件坐标的作用和工具坐标的作用其实差不多,都是为方便我们去操作。
例如:
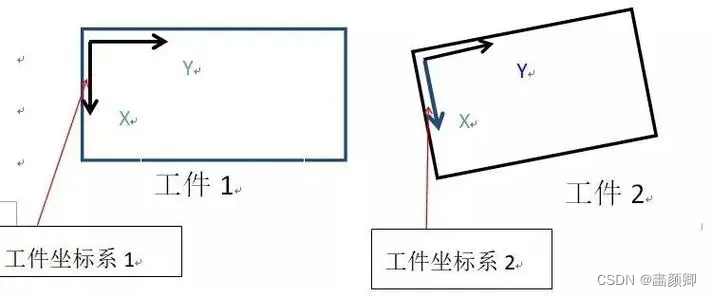
工件1和工件2其实是两个一样的工件,但是位置不同。我在工件1里面去做好了轨迹,但是工件2我还没做,难不成要再重复一遍上面的操作?拜托很烦的哎~ 能不能偷懒?
这个时候我们的工件坐标作用就来了,给这个工件再做一个工件坐标系。点A原本相对于工件1是5mm的距离,
替换成工件2的话,点A就相对于工件2也是5mm的距离,整体偏移嘛。
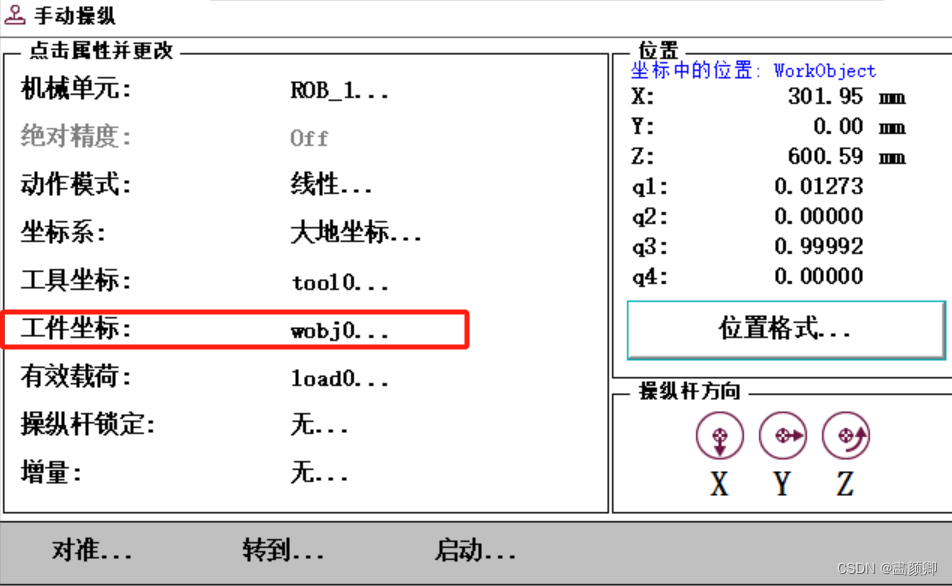
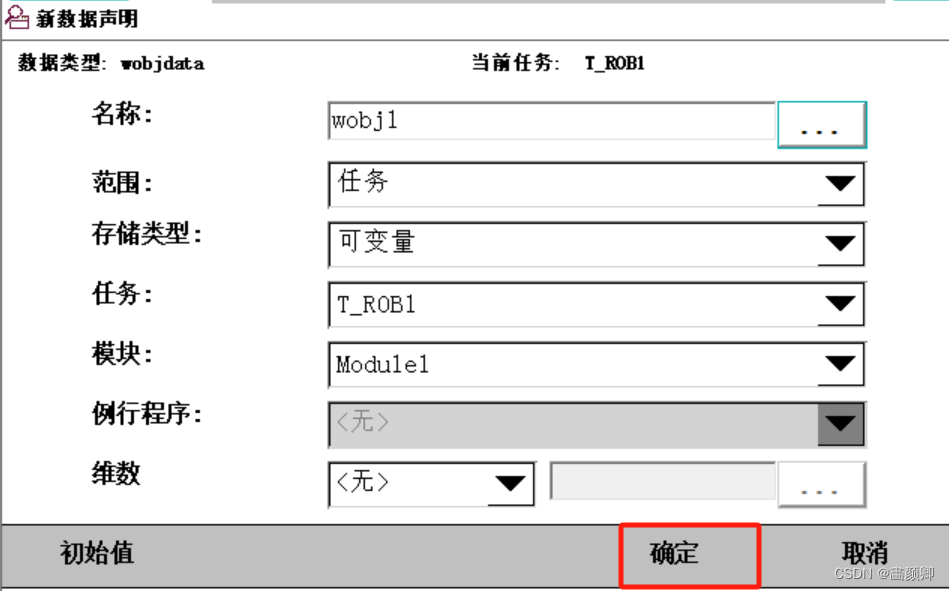
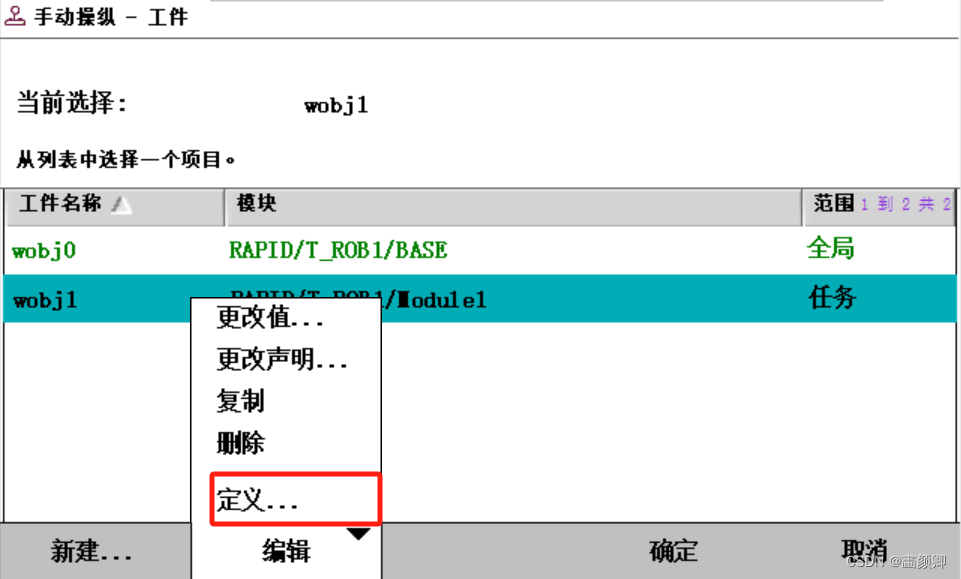
接下来就如何去配置工件坐标系
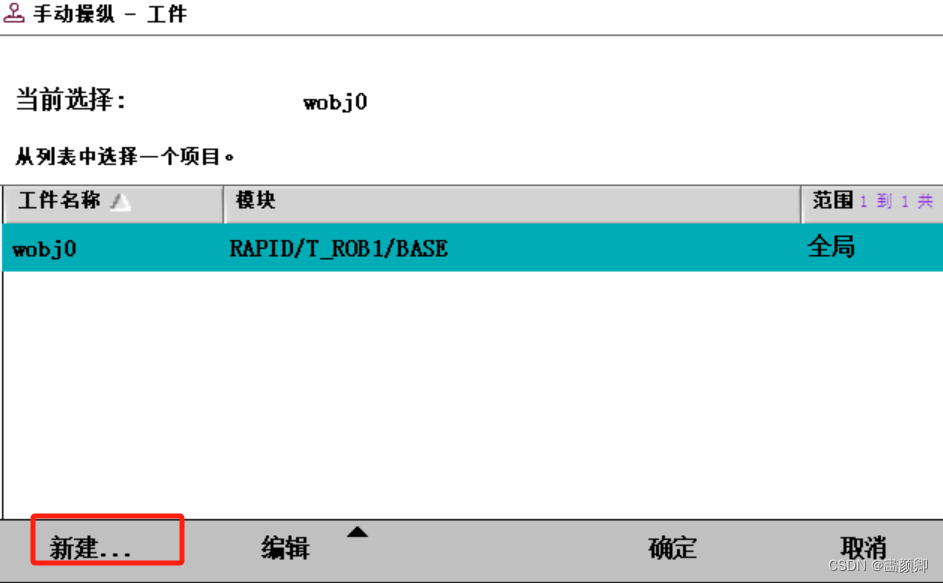
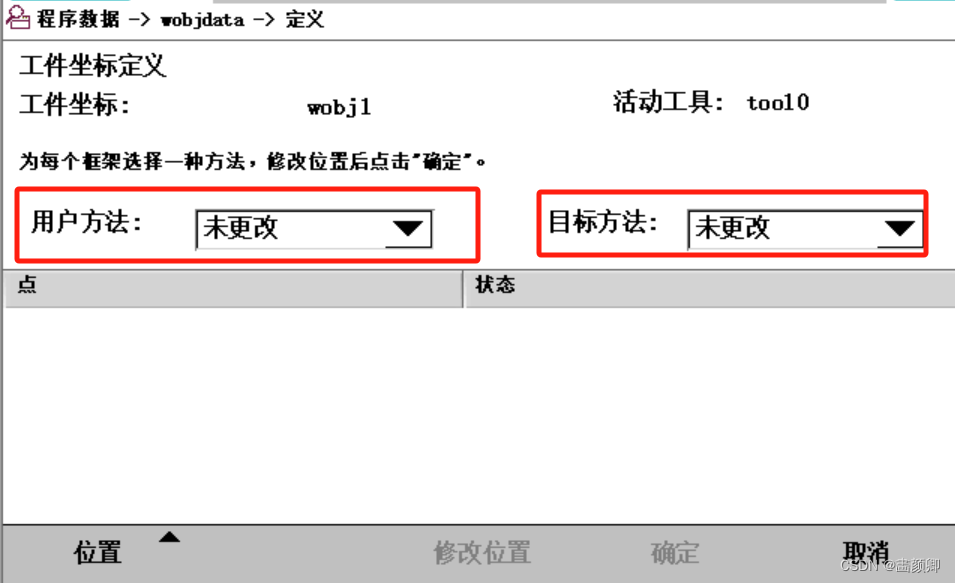
在这里你可能会好奇,为什么有两个方法?我应该选那个?它们有什么区别?
随我细细道来~
如果机械臂正夹持着工具,则在世界坐标系中定义用户坐标系(如果使用固定工具,则在腕坐标系中定义)。而目标坐标系是在用户坐标系中进行定义。如果只选择目标方法创建,则相当于在在世界坐标系中定义目标坐标系。
如果没有什么特殊要求选那个都可以,我自己的话一般都是用用户方法。
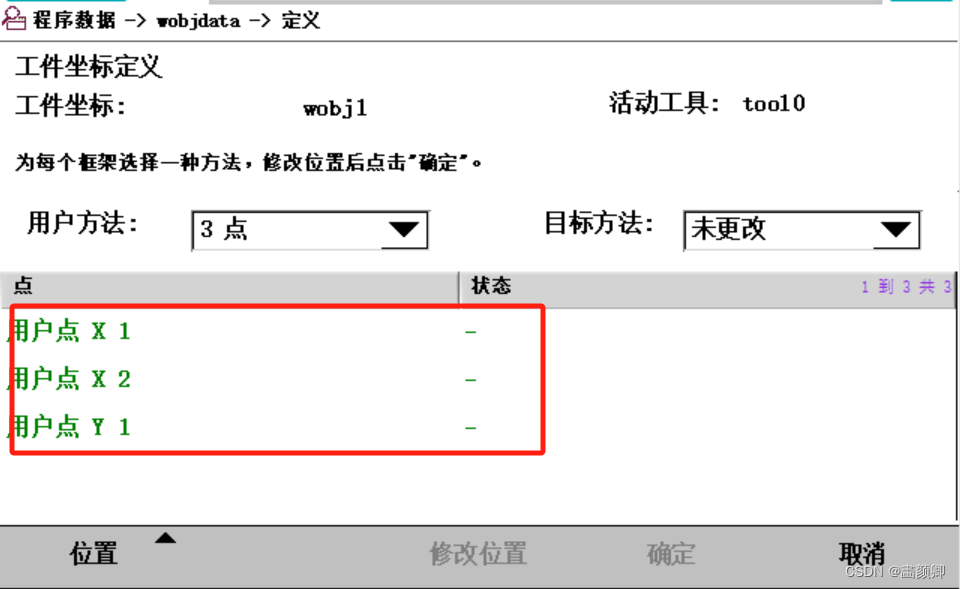
X1:坐标系原点
X2:X轴的正方向
Y1:Y轴的正方向



















 8379
8379

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











