







第二章 控制系统的数学模型
2.1数学模型的类型
输入输出描述模型与内部描述模型
数学模型的特点:
输出量在左边
输入量在右边
2.2 控制系统的动态微分方程
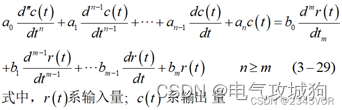
线性定常系统的微分方程:设线性定系统的微分方程式为:
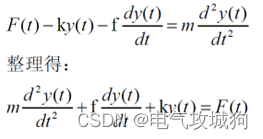
例题1:设有一个弹簧-质量-阻尼动力系统如图所示,当外力F(t)作用于系统时,系统将产生运动,试写出外力F(t)与质量块的位移y(t)之间的动态方程。其中物体重力忽略不计,弹簧的弹性系数为k,阻尼力大小与速度成正比且阻尼系数为f,质量块的质量为m。
解:由牛顿第二定律可知:
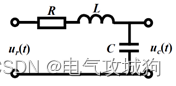
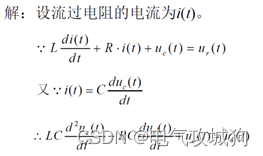
例题2:有一个电阻-电感-电容串联系统如图所示,试列出以ur(t)为输入量,uc(t)为输出量的微分方程。
2.3控制系统的传递函数
-
传递函数的定义
在零初始条件下,系统(或元件)输出量的拉氏变换与其输入量的拉氏变换之
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 883
883











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









