







前言
Hough变换是实现边缘检测的一种有效方法,其基本思想是将测量空间的一点变换到参量空间的一条曲线或曲面,而具有同一参量特征的点变换后在参量空间中相交,通过判断交点处的积累程度来完成特 征曲线的检测。
1 原理
保罗·哈夫于1962年提出了Hough变换法,并申请了专利。该方法 将图像空间中的检测问题转换到参数空间,通过在参数空间里进行简单的累加统计完成检测任务,并用大多数边界点满足的某种参数形式来描述图像的区域边界曲线。这种方法对于被噪声干扰或间断区域边界的图像具有良好的容错性。Hough变换最初主要应用于检测图像空间中的直线,最早的直线变换是在两个笛卡儿坐标系之间进行的,这给检测斜率无穷大的直线带来了困难。1972年,杜达(Duda)将变换形式进行了转化,将数据空间中的点变换为
ρ
−
θ
ρ-θ
ρ−θ参数空间中的曲线,改善了其检测直线的性能。该方法被不断地研究和发展,在图像分析、计算机视觉、模式识别等领域得到了非常广泛的应用,已经成为模式识别的一种重要工具。
直线的方程可由下面式子表示:
y
=
k
x
+
b
\begin{aligned} &y = kx + b \end{aligned}
y=kx+b
其中,
k
k
k和
b
b
b分别是斜率和截距。现在将
y
=
k
x
+
b
y=kx+b
y=kx+b转换成
b
=
−
x
k
+
y
b=-xk+y
b=−xk+y,因为
k
k
k和
b
b
b都是确定值所以在
x
−
y
x-y
x−y平面上的一条线在
k
−
b
k-b
k−b平面上代表一个点。

反过来在
k
−
b
k-b
k−b平面上的一条直线
b
=
−
x
k
+
y
b=-xk+y
b=−xk+y在
x
−
y
x-y
x−y平面上代表一个点,因为此时
x
x
x和
y
y
y在直线
b
=
−
x
k
+
y
b=-xk+y
b=−xk+y中分别是斜率和截距为定值。
其次是过
x
−
y
x-y
x−y平面上的某一点(
x
0
x_0
x0,
y
0
y_0
y0) 的所有直线的参数都满足方程
y
0
=
k
x
0
+
b
y_0=kx_0+b
y0=kx0+b。即过
x
−
y
x-y
x−y平面上点(
x
0
x_0
x0,
y
0
y_0
y0)的一族直线在参数
k
−
b
k-b
k−b平面上对应于一条直线。同样的道理将该族直线
y
0
=
k
x
0
+
b
y_0=kx_0+b
y0=kx0+b转变到
k
−
b
k-b
k−b平面上有
b
=
−
x
0
k
+
y
0
b=-x_0k+y_0
b=−x0k+y0,此时斜率(
−
x
0
-x_0
−x0)和斜距(
y
0
y_0
y0)固定,
b
b
b为
k
k
k的函数,所以在
k
−
b
k-b
k−b平面上对应于一条直线。

有了上面的知识,再来看看在
x
−
y
x-y
x−y平面上三点共线是怎么等效到到
k
−
b
k-b
k−b平面的。
可以看出如果笛卡尔坐标系的点共线,这些点在霍夫空间对应的直线交于一点:这也是必然,共线只有一种取值可能。再来考虑特殊情况,当三点共线恰好垂直
x
x
x轴呢?此时直线的斜率
k
k
k为无穷大,
y
=
k
x
+
b
y=kx+b
y=kx+b形式的直线方程无法表示
x
=
c
x=c
x=c(
c
c
c为常数)形式的直线。所以在实际应用中,一般采用距离和角度参数方程来表示如下:
ρ
=
x
c
o
s
θ
+
y
s
i
n
θ
\begin{aligned} &ρ=xcosθ+ysinθ \end{aligned}
ρ=xcosθ+ysinθ
其中,
ρ
ρ
ρ为原点到直线的垂直距离,
θ
θ
θ为
ρ
ρ
ρ与
x
x
x轴的夹角,转换过程如下,注意的是这个并不是极坐标表达式,只是形式写起来跟极坐标的形式是一样的。这是因为
ρ
ρ
ρ和
θ
θ
θ都是固定的,对应唯一的直线,而如果是极坐标,那其他对的
ρ
ρ
ρ和
θ
θ
θ也会满足这一直线。

根据
ρ
=
x
c
o
s
θ
+
y
s
i
n
θ
ρ=xcosθ+ysinθ
ρ=xcosθ+ysinθ,直线上不同的点在参数空间中被变换为一族相交于
p
p
p点的正弦曲线,因此可以通过检测参数空间中的局部最大值
p
p
p点,来实现
x
−
y
x-y
x−y坐标系中直线的检测。
2 算法流程
①将参数空间量化成
m
×
n
m×n
m×n(
m
m
m为
θ
θ
θ的等份数,
n
n
n为
ρ
ρ
ρ的等份数)个单元,并设置累加器矩阵
Q
[
m
×
n
]
Q[m×n]
Q[m×n];
②给参数空间中的每个单元分配一个累加器
Q
Q
Q(
θ
i
θ_i
θi,
p
j
p_j
pj)(
0
<
i
<
m
−
1
0<i<m- 1
0<i<m−1,
0
<
j
<
n
−
1
0<j<n-1
0<j<n−1),并把累加器的初始值置为零;
③将直角坐标系中的各点(
x
k
x_k
xk,
y
k
y_k
yk)(
k
=
1
k=1
k=1,
2
2
2,…,
s
s
s,
s
s
s为直角坐 标系中的点数)代入式
ρ
=
x
c
o
s
θ
+
y
s
i
n
θ
ρ=xcosθ+ysinθ
ρ=xcosθ+ysinθ,然后将
θ
0
~
θ
m
−
1
θ_0~θ_{m-1}
θ0~θm−1也都代入其中,分别计算出相应的值
p
j
p_j
pj;
④在参数空间中,找到每一个(
θ
i
θ_i
θi,
p
j
p_j
pj)所对应的单元,并将该 单元的累加器加1,即
Q
Q
Q(
θ
i
θ_i
θi,
p
j
p_j
pj)
=
=
=
Q
Q
Q(
θ
i
θ_i
θi,
p
j
p_j
pj)
+
1
+1
+1,对该单元进行一次投票;
⑤待
x
−
y
x-y
x−y坐标系中的所有点都进行运算之后,检查参数空间的累加 器,必有一个出现最大值,这个累加器对应单元的参数值作为所求直线的参数输出。当然你可以指定一个阈值,就是投票数达到多少就可以认定为一条直线,这样就可以一次性输出多条直线。
例子: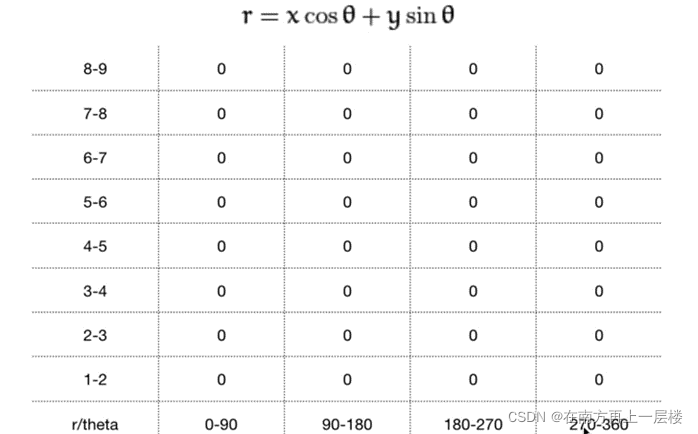
将
r
r
r(
p
p
p)分成了9份,区间是[0,9],
r
r
r一定是取有效值,因为我们的图像的最长直线就是其对角线;然后将
θ
θ
θ以90°为步长分成了4个区间,当然你可以分成你想要的
θ
θ
θ区间。然后开始遍历 Canny 图像(很关键,我们在利用霍夫变换进行直线检测时,要先对图像进行边缘检测)。
遇到黑点直接跳过,我们只关注白点。然后将每个白点的坐标(
x
0
x_0
x0,
y
0
y_0
y0)和四个角度
θ
θ
θ(
θ
1
=
90
°
θ_1=90°
θ1=90°,
θ
2
=
180
°
θ_2=180°
θ2=180°,
θ
3
=
270
°
θ_3=270°
θ3=270°,
θ
4
=
360
°
θ_4=360°
θ4=360°)带入到
r
=
x
c
o
s
θ
+
y
s
i
n
θ
r=xcosθ+ysinθ
r=xcosθ+ysinθ中,得到对应的
r
1
r_1
r1,
r
2
r_2
r2,
r
3
r_3
r3,
r
4
r_4
r4,根据这些
r
r
r值在对应区间进行投票。不断重复上述步骤直至图像遍历完毕。就可以根据
r
r
r的投票数来确定直线。
3 优缺点
霍夫变换是一种全局性的检测方法,具有极佳的抗干扰能力,可 以很好地抑制数据点集中存在的干扰,同时还可以将数据点集拟合成多条直线。但是,霍夫变换的精度不容易控制,参数的微变就可能影响效果的大幅度变化,因此,不适合对拟合直线的精度要求较高的实际问题。同时,它所要求的巨大计算量使其处理速度很慢,从而限制了它在实时性要求很高的领域的应用
















 658
658











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











