







D:\programfiles\miniconda\envs\py38torch_gpu\python.exe G:/yolov5/yolov5-6.1/train.py --data ../air-filter/data.yaml --cfg models/yolov5s-tph2.yaml --batch-size 1
Traceback (most recent call last):
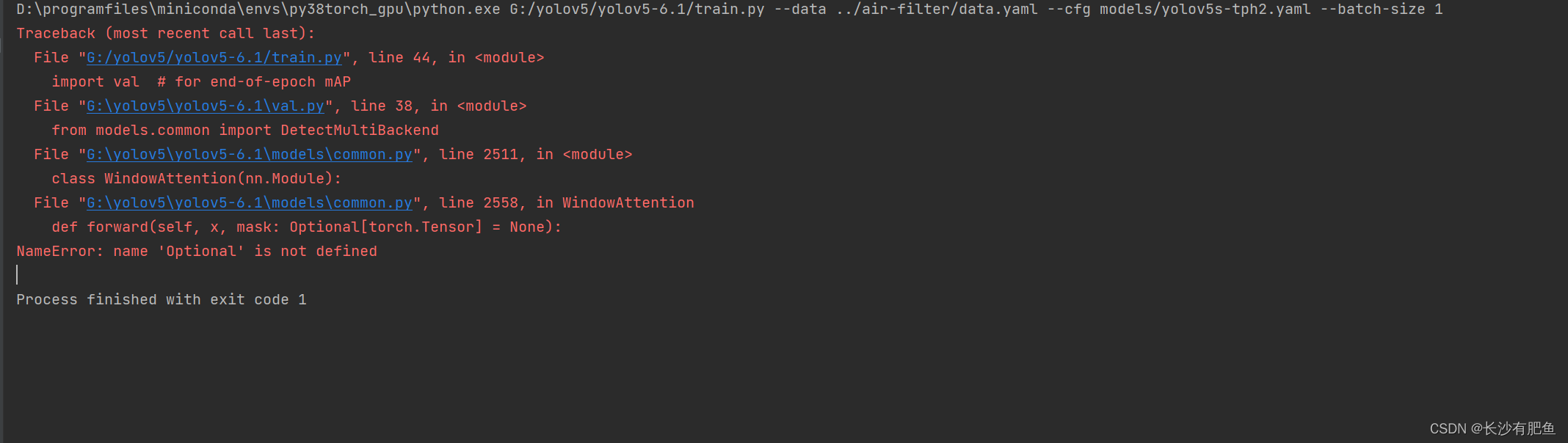
File "G:/yolov5/yolov5-6.1/train.py", line 44, in <module>
import val # for end-of-epoch mAP
File "G:\yolov5\yolov5-6.1\val.py", line 38, in <module>
from models.common import DetectMultiBackend
File "G:\yolov5\yolov5-6.1\models\common.py", line 2511, in <module>
class WindowAttention(nn.Module):
File "G:\yolov5\yolov5-6.1\models\common.py", line 2558, in WindowAttention
def forward(self, x, mask: Optional[torch.Tensor] = None):
NameError: name 'Optional' is not defined加入:
from typing import OptionalD:\programfiles\miniconda\envs\py38torch_gpu\python.exe G:/yolov5/yolov5-6.1/train.py --data ../air-filter/data.yaml --cfg models/yolov5s-tph2.yaml --batch-size 1
train: weights=yolov5s.pt, cfg=models/yolov5s-tph2.yaml, data=../air-filter/data.yaml, hyp=data\hyps\hyp.scratch-low.yaml, epochs=100, batch_size=1, imgsz=640, rect=False, resume=False, nosave=False, noval=False, noautoanchor=False, evolve=None, bucket=, cache=None, image_weights=False, device=, multi_scale=False, single_cls=False, optimizer=SGD, sync_bn=False, workers=0, project=runs\train, name=exp, exist_ok=False, quad=False, cos_lr=False, label_smoothing=0.0, patience=100, freeze=[0], save_period=-1, local_rank=-1, entity=None, upload_dataset=False, bbox_interval=-1, artifact_alias=latest
github: skipping check (not a git repository), for updates see https://github.com/ultralytics/yolov5
YOLOv5 2022-2-22 torch 1.9.0+cu111 CUDA:0 (GeForce RTX 2080 Super with Max-Q Design, 8192MiB)Weights & Biases: run 'pip install wandb' to automatically track and visualize YOLOv5 runs (RECOMMENDED)
hyperparameters: lr0=0.01, lrf=0.01, momentum=0.937, weight_decay=0.0005, warmup_epochs=3.0, warmup_momentum=0.8, warmup_bias_lr=0.1, box=0.05, cls=0.5, cls_pw=1.0, obj=1.0, obj_pw=1.0, iou_t=0.2, anchor_t=4.0, fl_gamma=0.0, hsv_h=0.015, hsv_s=0.7, hsv_v=0.4, degrees=0.0, translate=0.1, scale=0.5, shear=0.0, perspective=0.0, flipud=0.0, fliplr=0.5, mosaic=1.0, mixup=0.0, copy_paste=0.0
TensorBoard: Start with 'tensorboard --logdir runs\train', view at http://localhost:6006/
2022-10-24 22:39:36.244864: W tensorflow/stream_executor/platform/default/dso_loader.cc:59] Could not load dynamic library 'cudart64_101.dll'; dlerror: cudart64_101.dll not found
2022-10-24 22:39:36.244967: I tensorflow/stream_executor/cuda/cudart_stub.cc:29] Ignore above cudart dlerror if you do not have a GPU set up on your machine.from n params module arguments
0 -1 1 3520 models.common.Conv [3, 32, 6, 2, 2]
1 -1 1 18560 models.common.Conv [32, 64, 3, 2]
2 -1 1 18816 models.common.C3 [64, 64, 1]
3 -1 1 73984 models.common.Conv [64, 128, 3, 2]
4 -1 2 115712 models.common.C3 [128, 128, 2]
5 -1 1 295424 models.common.Conv [128, 256, 3, 2]
6 -1 3 625152 models.common.C3 [256, 256, 3]
7 -1 1 1180672 models.common.Conv [256, 512, 3, 2]
8 -1 1 1182720 models.common.C3 [512, 512, 1]
9 -1 1 656896 models.common.SPPF [512, 512, 5]
10 -1 1 131584 models.common.Conv [512, 256, 1, 1]
11 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
12 [-1, 6] 1 0 models.common.Concat [1]
13 -1 1 361984 models.common.C3 [512, 256, 1, False]
14 -1 1 33024 models.common.Conv [256, 128, 1, 1]
15 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
16 [-1, 4] 1 0 models.common.Concat [1]
17 -1 1 90880 models.common.C3 [256, 128, 1, False]
18 -1 1 8320 models.common.Conv [128, 64, 1, 1]
19 -1 1 0 torch.nn.modules.upsampling.Upsample [None, 2, 'nearest']
20 [-1, 2] 1 0 models.common.Concat [1]
Traceback (most recent call last):
File "G:/yolov5/yolov5-6.1/train.py", line 653, in <module>
main(opt)
File "G:/yolov5/yolov5-6.1/train.py", line 546, in main
train(opt.hyp, opt, device, callbacks)
File "G:/yolov5/yolov5-6.1/train.py", line 131, in train
model = Model(cfg or ckpt['model'].yaml, ch=3, nc=nc, anchors=hyp.get('anchors')).to(device) # create
File "G:\yolov5\yolov5-6.1\models\yolo.py", line 107, in __init__
self.model, self.save = parse_model(deepcopy(self.yaml), ch=[ch]) # model, savelist
File "G:\yolov5\yolov5-6.1\models\yolo.py", line 399, in parse_model
m_ = nn.Sequential(*(m(*args) for _ in range(n))) if n > 1 else m(*args) # module
File "G:\yolov5\yolov5-6.1\models\common.py", line 2725, in __init__
self.m = SwinTransformerBlock(c_, c_, c_//32, n)
File "G:\yolov5\yolov5-6.1\models\common.py", line 2710, in __init__
self.tr = nn.Sequential(*(SwinTransformerLayer(c2, num_heads=num_heads, window_size=window_size,
File "G:\yolov5\yolov5-6.1\models\common.py", line 2710, in <genexpr>
self.tr = nn.Sequential(*(SwinTransformerLayer(c2, num_heads=num_heads, window_size=window_size,
File "G:\yolov5\yolov5-6.1\models\common.py", line 2620, in __init__
self.attn = WindowAttention(
File "G:\yolov5\yolov5-6.1\models\common.py", line 2540, in __init__
coords = torch.stack(torch.meshgrid([coords_h, coords_w], indexing="ij")) # [2, Mh, Mw]
TypeError: meshgrid() got an unexpected keyword argument 'indexing'Process finished with exit code 1
找到:
将
coords = torch.stack(torch.meshgrid([coords_h, coords_w], indexing="ij")) # [2, Mh, Mw]改为:
coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # [2, Mh, Mw]



















01-21
 1569
1569
1569

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











