






问题描述:前面都是一步一步走没问题,在编译的时候出现了一下问题。

问题见下:fatal error: xxxxx.hpp:No such file or directory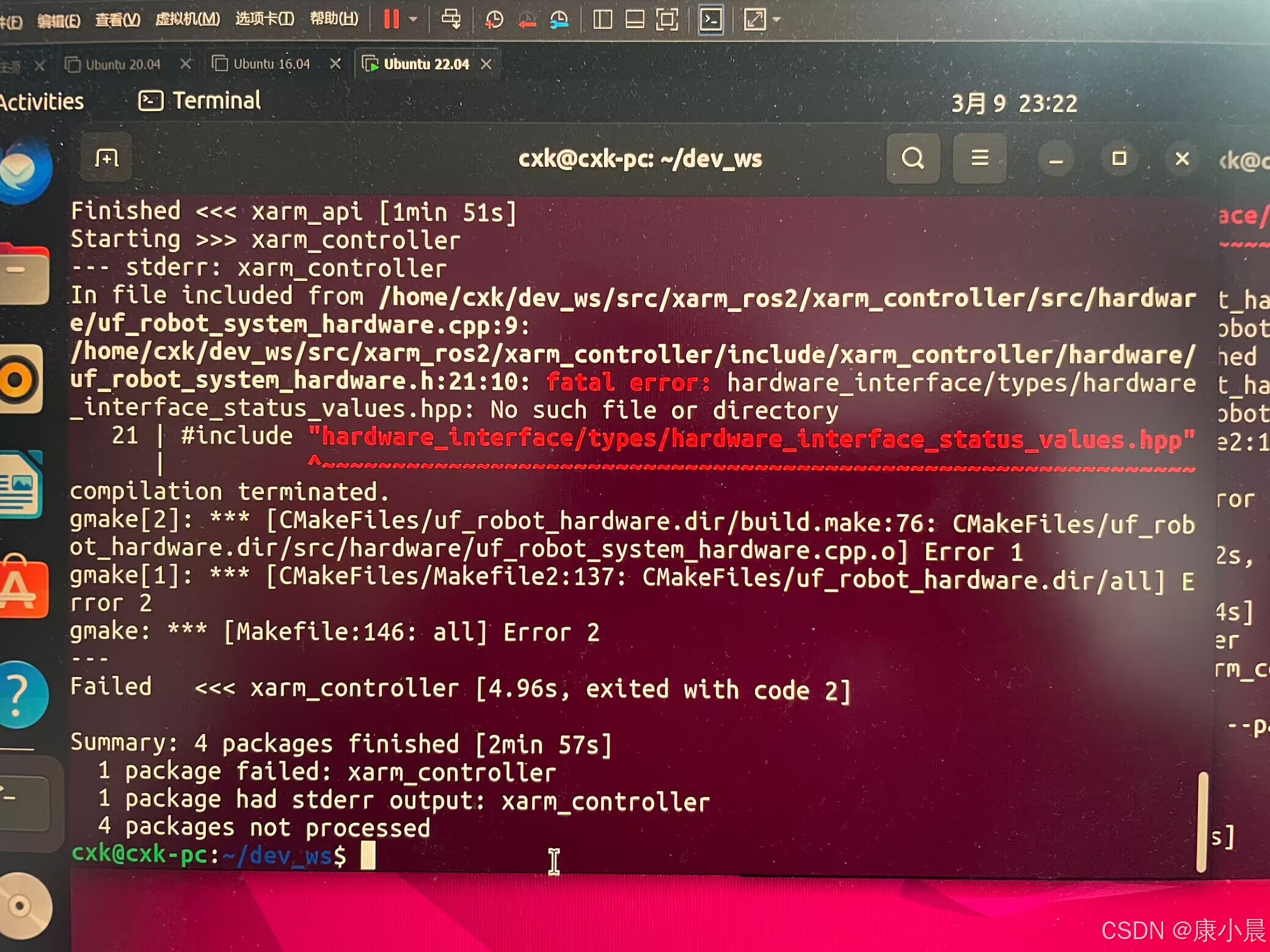
以下是deepseek的搜索结果
根据错误信息,问题出在缺少 hardware_interface/types/hardware_interface_status_values.hpp 头文件。以下是逐步排查和解决方案:
1. 确认ROS 2版本及依赖
-
检查ROS 2版本:
运行echo $ROS_DISTRO确认当前ROS版本(如Foxy、Humble等)。不同版本的hardware_interface头文件路径可能不同。 -
安装/更新ros2-control包:
确保已安装对应版本的ros2-control和hardware_interface:sudo apt update sudo apt install ros-$ROS_DISTRO-ros2-control ros-$ROS_DISTRO-hardware-interface
2. 检查头文件是否存在
-
手动查找头文件:
运行以下命令确认头文件路径:find /opt/ros/$ROS_DISTRO -name "hardware_interface_status_values.hpp"
-
如果找到路径,检查代码中的
#include是否正确。 -
如果未找到,可能是版本不兼容或安装问题。
-
3. 适配代码到当前ROS版本
-
情况一:头文件路径变更
在ROS 2 Humble及之后版本,头文件路径可能已更新。将代码中的:#include "hardware_interface/types/hardware_interface_status_values.hpp"
改为:
#include "hardware_interface/hardware_interface_status_values.hpp"
-
情况二:使用兼容分支
如果使用的xarm_ros2代码未适配你的ROS版本,尝试切换到对应分支。例如: -
cd ~/dev_ws/src/xarm_ros2 git checkout humble # 假设存在humble分支
4. 重新编译
清理并重新构建:
cd ~/dev_ws rm -rf build install log colcon build
———————————————————————————————————————————
到此就成功了。果然是deepseek靠谱👍
———————————————————————————————————————————
5. 其他可能
-
手动源码安装ros2-control:
如果系统包过旧,从源码安装最新版本:cd ~/dev_ws/src git clone https://github.com/ros-controls/ros2_control.git git clone https://github.com/ros-controls/ros2_controllers.git cd .. rosdep install --from-paths src --ignore-src -y colcon build
总结
该错误通常由ROS版本与代码依赖不匹配导致。调整头文件路径或切换代码分支即可解决。如果问题持续,请提供ROS版本和xarm_ros2的仓库链接以便进一步排查。

















 1001
1001

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









