







 本文介绍KUKA机器人通过圆弧指令实现圆弧或整圆轨迹运动编程,其圆弧指令有CIRC和SCIRC两种,SCIRC轨迹更优且可设角度。还给出实现整圆运动轨迹的编程示例,包括用两个CIRC指令和一个SCIRC指令的方法。
本文介绍KUKA机器人通过圆弧指令实现圆弧或整圆轨迹运动编程,其圆弧指令有CIRC和SCIRC两种,SCIRC轨迹更优且可设角度。还给出实现整圆运动轨迹的编程示例,包括用两个CIRC指令和一个SCIRC指令的方法。
KUKA机器人通过圆弧指令来实现有圆弧轨迹或整圆轨迹的运动编程,目前KUKA机器人的圆弧指令包括CIRC和SCIRC两种。两种指令都能实现对圆弧轨迹和整圆轨迹的运动编程,但SCIRC圆弧指令相对于CIRC圆弧指令,运动轨迹更优化了一些,而且增加了圆弧的角度设置。
可以通过以下程序示例来进行区别与运用,以下展示实现整圆运动轨迹的两种编程方法。
1、通过两个CIRC圆弧指令实现整圆的运动轨迹,两个CIRC圆弧指令画一个圆。

如上图:创建一个P1程序,添加两个CIRC圆弧指令,P7和P9是辅助点,P8和P10是目标点。
2、通过一个SCIRC圆弧指令实现整圆的运动轨迹编程。
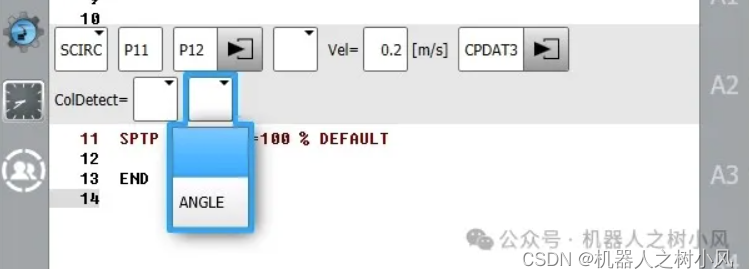
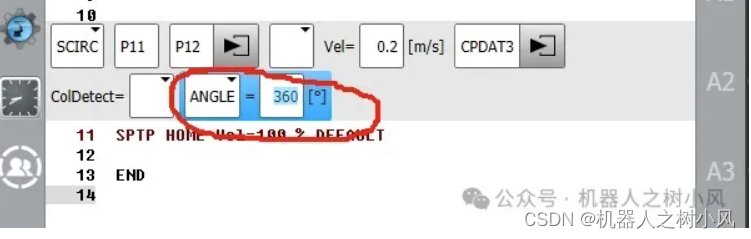
添加SCIRC运动指令,在最后一栏处选择ANGLE(角度);
画整圆时,设置为360度。
将辅助点和目标点确定,Touch Up确定后SCIRC指令添加完成。
3、以下图展示了两种实现整圆运动轨迹编程的方法。

有兴趣的可以添加指令测试一下。


















 195
195

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











