






前言
随着传感技术、通讯技术、地理信息技术的发展和人工智能的应用,自动驾驶技术逐步成熟,自动驾驶汽车量产投放和规模化运营的时代即将到来。近期世界各大城市陆续开放自动驾驶道路测试,自动驾驶技术提升、法律法规制定和行业发展前景的研究大量开展,但自动驾驶车辆可能给城市交通系统、城市空间形态乃至于城市内在发展机理带来的巨大影响却未得到足够重视。既有研究或从定性角度对自动驾驶环境下的未来城市进行展望,或仅阐述自动驾驶技术对交通运行的单一影响,缺乏系统且量化的分析研究建模方法。本文基于自动驾驶汽车的技术特征,通过修正的土地利用-交通模型,以U市为实例,量化评估不同场景下自动驾驶汽车对城市空间形态的变化,揭示自动驾驶技术与城市空间生长的互动机理。
1
自动驾驶汽车的技术特征与影响
自动驾驶的关键技术主要包括环境感知、行为决策、路径规划和运动控制四大部分。自动驾驶汽车依靠雷达、卫星定位、电脑视觉等技术感知道路环境,对获取的信息进行决策判断后自动规划行车路线,进而控制车辆到达预期目的地,是人工智能、视觉计算、雷达、监控装置和全球定位系统协同合作的产物。相较于传统汽车,自动驾驶汽车不仅解放了驾驶员的双手,更实现了对交通信息的即时共享、交通资源的统一调配。从城市与交通发展的角度,其带来的影响包括对交通流的影响、对出行行为的影响、对基础设施和街道设计的影响和对城市空间形态的影响等多个方面。
1.1 对交通流的影响
自动驾驶系统比人类驾驶员反应和操作时间更短。与传统汽车相比,自动驾驶汽车间的车头时距将会缩小,车道宽度中的余宽也可以相应减少,道路单位时间通行流量将有效增加。在车车通讯和车路通讯技术协助下,自动驾驶汽车通过交叉口的时间也将大幅缩短。来自不同方向的车辆可以通过速度控制而不通过交通灯的控制穿越冲突区域,交叉口前排队现象将不复存在。
1.2 对出行行为的影响
驾驶任务的自动化为老人、残疾人、儿童和无法获得驾照的旅客等提供了独自出行的可能,为道路系统带来新的用户群体。而在不需要操纵汽车和观测环境的情况下,旅客的出行舒适度将大幅提升,出行时间成本相应降低,使用自动驾驶汽车出行将更具吸引力,这也将导致居民总体出行次数和出行里程的增加。此外,出行里程还受未来停车政策和共享化程度的影响。如果共享的自动驾驶汽车只能在规定区域接送乘客和停车,空载行驶距离将增加。
1.3 对基础设施的影响
自动驾驶汽车需要的城市街道车道宽度将缩窄,城市街巷将获得空间重塑的机会,为城市绿道、非机动车道、步行道、公共活动区域腾出空间资源。为适应自动驾驶汽车,道路交叉口将被改造,交通灯和各类交通标志可能大幅减少。即停即走的自动驾驶车辆对停车场的需求将显著减少,城市中心区的停车场被步行可达的停车落客区所替代,集中停车区域可被规划到土地价值不高的城市边缘地段。
1.4 对城市空间形态的影响
自动驾驶汽车的普及将为城市中心区释放大量的可利用空间。现存的集散广场、路边停车设施、地下车库等可转变为更具价值或公共属性功能的地块。城市街巷界面将以人为尺度进行组织与设计,道路的主体不再是车辆,而是人车共享的活动空间。但是出行时间成本的降低和舒适度的增加,使居住在郊区比在城市中心区更具吸引力。停车区域的迁移也将带来同样的后果。城市居住区将不断扩大,城市边缘出现蔓延现象。
2
自动驾驶环境下的土地利用-交通修正模型
2.1 土地利用-交通相互作用模型
土地利用-交通相互作用模型(Land use-Transport Interaction Model, LUTI)是研究交通系统与城市空间演化、城市发展时常用的数学模型,其涵盖土地利用与开发、城市空间规划、交通需求与特征预测、社会经济学及计算机等多个知识领域,被欧美国家广泛应用于模拟城市空间发展过程,是辅助政策决策的有力工具。模型的作用机理是土地利用与交通系统间的反馈循环与相互作用。城市交通系统和居民出行行为会影响城市交通的可达性,而交通可达性会影响土地的吸引力,在市场力量作用下,城市各地块的房价将被改变,进而带来社会经济活动的相应变化(搬家、买车等),交通系统又会随这些活动的变化而变化。如此形成了一个反馈循环,其中的各项因素不断相互作用,保持动态平衡状态。因此,LUTI模型主要由土地利用和交通两大系统组成。土地利用系统反映居民在城市中活动的空间分布,交通系统包括交通基础设施的分布、运行状况、交通量统计计算、交通需求分布等内容。
2.2 自动驾驶环境下的模型修正
传统的土地利用-交通模型中并没有直接模拟自动驾驶汽车的模块,可通过改变模型中交通系统的各类参数来反映自动驾驶汽车的特性,以此建立自动驾驶汽车与居民活动和交通可达性的关系。考虑自动驾驶汽车的影响,选取三类参数:各种原因导致的新增出行、道路通行效率的改变和出行时间成本(时间价值)的改变。图1展示了修正后自动驾驶环境下的土地利用-交通模型。
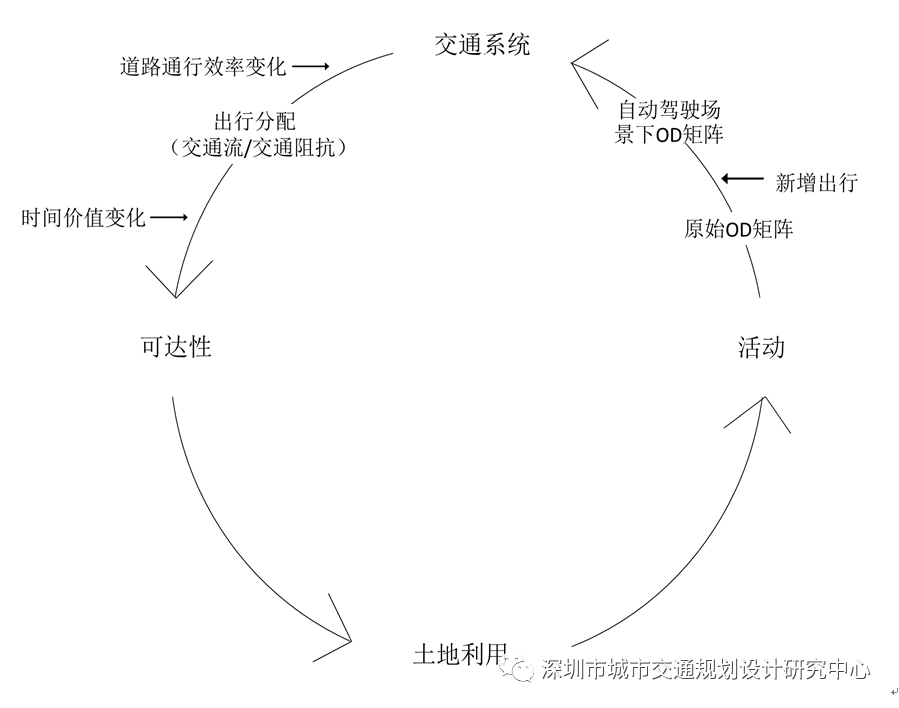
图1 自动驾驶环境下的土地利用-交通模型
资料来源:作者根据参考文献[13]改绘
2.3 自动驾驶的四类场景
作为一项创新技术,自动驾驶无论是在技术层面还是应用层面都存在一定的不确定性。公众接受度、市场接受度、技术稳定性与安全性等因素都会对其发展趋势造成影响。为应对这种不确定性,依托情景分析法,使用共享性和交通流特性构建自动驾驶不同的发展场景。在不同的共享程度和交通流混合程度下,自动驾驶将进入四种不同的发展情景(见图2),分别是取代型场景、竞争型场景、待命型场景和原始场景。
(1)原始场景下,自动驾驶技术保持在当今的水平而不再发展。
(2)取代型场景中,自动驾驶汽车以共享模式取代传统汽车和传统公共汽车、出租汽车的功能。这种更安全、更环保的交通方式成为社会主流,道路上行驶的车辆全部是自动驾驶车辆。
(3)竞争型场景与前一场景相反,人们还是偏向于购置私人自动驾驶汽车,而不是享受自动驾驶的出行服务,自动驾驶汽车将与传统汽车、公共交通、出租汽车等竞争用户与道路空间资源。
(4)待命型场景下,自动驾驶主要被应用于公共交通的情况,昂贵的价格使普通人无法拥有个人的自动驾驶汽车,但是政府将其视作解决城市拥堵和减少小汽车使用的手段,与公共交通、出租汽车行业协同提升城市交通品质。道路上主体车辆仍是传统小汽车,自动驾驶汽车需要适应在混合交通流中行驶。
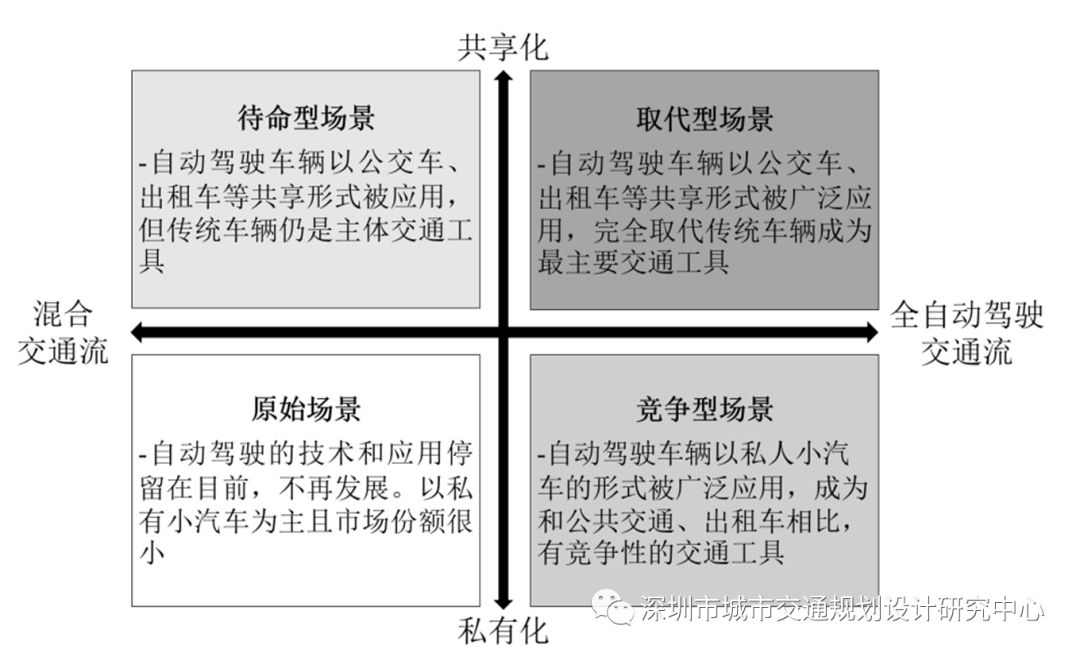
图2 自动驾驶未来场景分析
资料来源:作者自绘
2.4 场景参数预设
在取代型场景下,公共交通OD矩阵被全部增加到小汽车出行OD矩阵中,因为空载而增加的出行量取20%,共享的自动驾驶汽车可以在路边随时停靠,不需要特定的停车位,因此不产生额外的停车出行。假设车车协同和车路协同被全面应用,道路通行效率得到极大提高,高速公路通行效率将增加100%,城市道路通行效率可增加50%。交叉口延误几乎完全消失,取LUTI模型中可设定的最小值0.1。参考已有文献的研究结论,假定时间价值会减少35%。在竞争型场景和待命型场景中,对各项参数做相应调整。
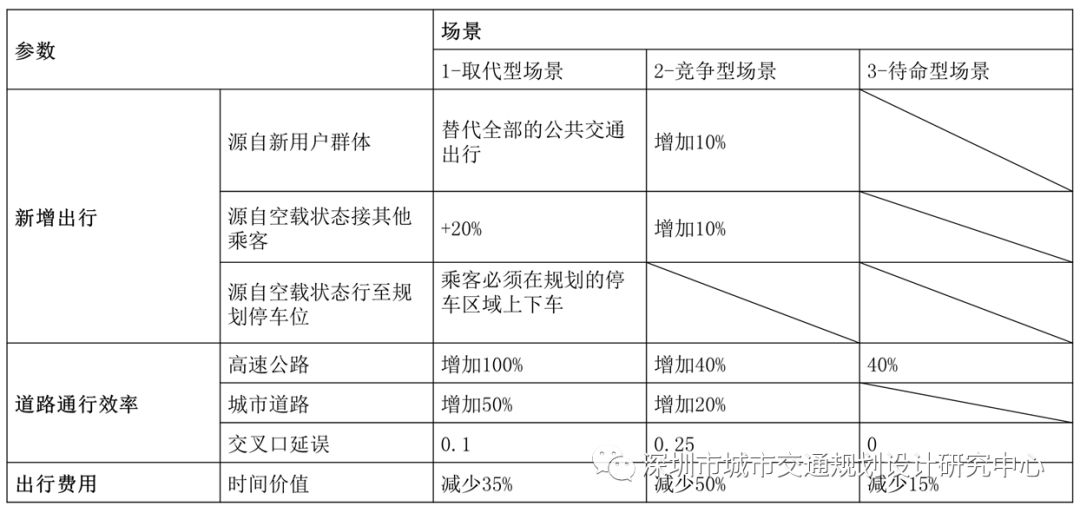
表1 各场景参数
资料来源:作者自制
3
案例分析
在缺少国内城市交通基础数据和土地利用-交通模型的背景下,本研究选用国外U市为研究对象,使用该市供高校和科研机构使用的开放模型。该市是典型的区域中心城市,拥有发达的环状放射型道路系统和环绕中心城区分布的城镇,对国内各大城市具有一定参考意义。将表1中参数输入U市已有的土地利用-交通仿真模型,得到各场景下交通可达性和城市空间形态的变化结果。
3.1 运行结果
U市各区域交通可达性变化比例与分布如图3所示。三种场景下的交通可达性均有不同程度的提升,待命型场景中可达性变化提升最少但分布最为集中,竞争型场景中可达性提升最大,90%以上的区域交通可达性提升了40%以上,而取代型场景中恰恰相反,绝大多数区域可达性提升不足40%。将交通可达性变化作为初始条件输入居住选址模型,以10年为时间变量,以现状居住密度为基准,得到各场景下居住密度的变化值(见图4)。原始场景中市中心区居住密度出现大幅降低,单位面积减少居住量超过400户·km-2,而在外围城镇中心出现了居住集中现象。取代型场景中市中心区吸引了大量住户迁入,增长大于200户·km-2,周边城镇中心有一定幅度居住增长。竞争型场景与取代型场景相比呈现相反趋势,市中心区居住密度降低,居民更倾向于居住在周边非中心城地区,城市边界蔓延。待命型场景中居住扩散范围与原始场景相差不大,但市中心区域出现一定量增长。
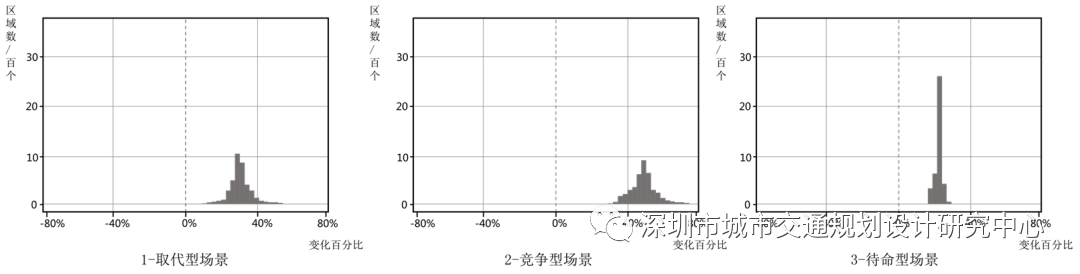
图3 各场景区域交通可达性变化与分布
资料来源:作者自绘
3.2 结果分析
取代型场景中,城市将呈现多中心紧凑型的空间分布形态。在道路网和交叉口密集的城市中心区,大量的道路空间可被重分配给绿道、自行车道和人行道,空间中的主体将发生从车到人的转变,街道的品质与活力得到大幅提升。街边停车区域将不再需要,通过与建筑外部空间的结合,可以改造为共享的商业空间。同样,建筑将不再需要停车配建,更多的空间可以分配给市民居住,居住密度因此提高,职住分离问题将得到缓解。同时,自动驾驶+共享出行的模型下,道路网可覆盖的周边城镇中心也将成为市民的居住倾向点。
竞争型场景中,城市居住分布形态将日益分散,城市边界蔓延。自动驾驶汽车仍为家庭或个人私有,需要停泊区域与停车空间。其舒适度和行驶速度将降低人们的出行时间成本,并产生新的出行需求。同时,自动驾驶汽车将与公共交通、出租汽车等形成竞争关系。这不仅表现在对吸引用户上,更表现在占据城市空间资源上。城市道路和高速公路可能需要分配单独的车道给自动驾驶汽车,为了便于管理,停车区域的重新规划也会随之施行。城市中心区空间资源不足的问题被恶化,与拥堵、品质不高的中心区相比,人们更愿意居住到偏僻但环境优越的郊区。出行距离的增加可以被使用自动驾驶汽车出行的舒适感提高、时间价值降低所中和。
待命型场景中,城市空间形态缓慢扩散,自动驾驶技术对城市发展进程的影响有限。作为公共交通和共享出行中的一种交通工具,自动驾驶汽车的优势并未完全发挥,但仍在一定程度上缓解了城市拥堵和停车困难的问题。此外,自动驾驶公共汽车和出租汽车的舒适感和体验感超过传统小汽车,公共交通出行在出行方式中的比例提升。公共交通便利的地区是人们倾向的居住点。
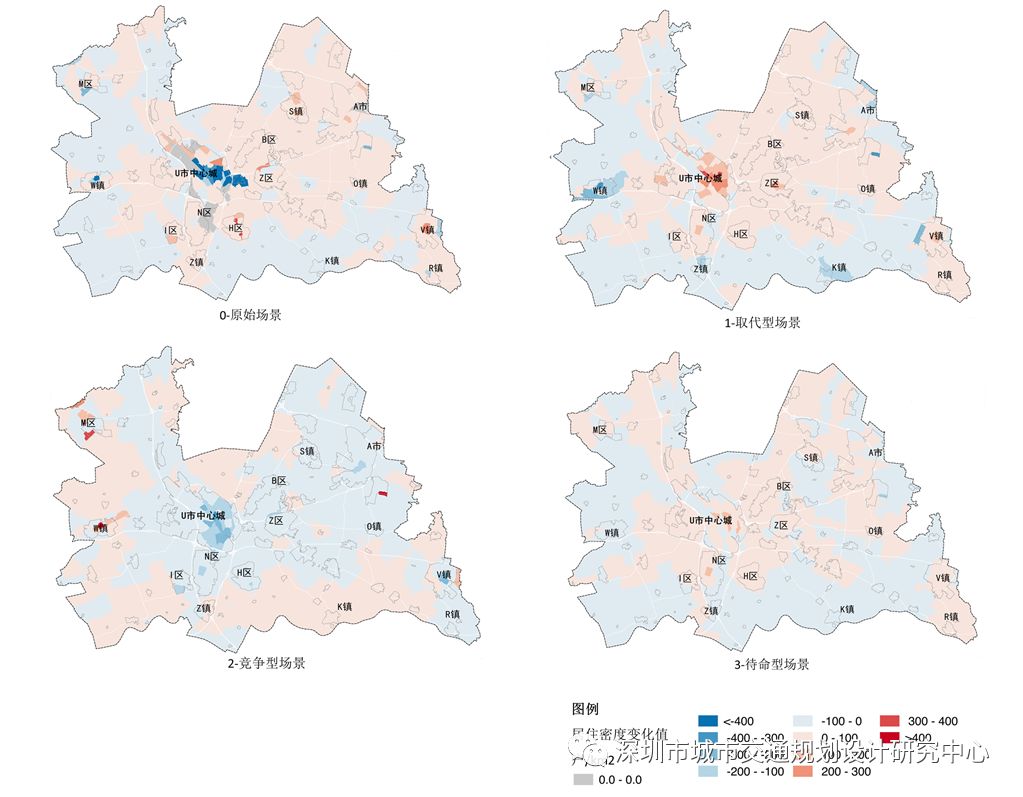
图4 各场景区域居住密度变化和分布
资料来源:作者自绘
4
结语
通过建立自动驾驶场景下城市空间生长的模拟方法,评估自动驾驶汽车对城市发展的影响。研究表明,自动驾驶环境下,不同场景中城市交通的可达性均可得到提高,但自动驾驶汽车对城市未来空间形态的影响不尽相同。当自动驾驶汽车以共享模式作为一种公共交通方式时,城市空间将呈现环绕市中心区的多中心紧凑型格局,道路空间资源与停车空间资源获得了重分配的机会。当自动驾驶汽车仍是私人小汽车模式时,交通可达性的提升、出行舒适性的提升与时间成本的下降,可能会带来城市边界的蔓延和郊区化现象。
自动驾驶时代的到来可能突破甚至颠覆传统的城市交通模式,进而带来城市空间形态与布局的重大变化。针对自动驾驶的规划工作不应局限于车辆技术或是交通系统本身,更要从国土空间分析框架入手,充分考量和评估自动驾驶与城市空间生长、城市发展进程的关系,客观、辩证地看待这一新兴技术可能带来的影响。相关方面的研究应进一步加强,为自动驾驶时代城市空间、城市交通发展战略和政策的制定提供依据。
参考文献:
[1]宫慧琪,牛芳. 自动驾驶关键技术与产业发展态势研究[J].信息通信技术与政策. 2018(08)
[2]王鹏,雷诚.自动驾驶汽车对城市发展的影响及规划应对 [J].规划师,2019(8):79-84.
[3]王维礼,朱杰,郑莘荑.无人驾驶汽车时代的城市空间特征之初探 [J].规划师,2018(12):155-160.
[4] Jean-Pierre Orfeuil, Mireille Apel-Muller. 自动驾驶与未来城市发展[J]. 上海城市规划, 2018(02)
[5] 张凤霖,万涛,陈云微. 基于自动驾驶汽车的城市交通变革与展望[C]. 新常态:传承与变革——2015中国城市规划年会论文集. 中国贵州贵阳. 中国城市规划学会、贵阳市人民政府. 2015.
[6] Milakis, D., Snelder, M., Arem, B. van, & Homem de Almeida Correia, G. Scenarios about development and implications of automated vehicles in the Netherlands[J], European Journal of Transport and Infrastructure Research, 2017(1)
[7] 王文,汤文蕴, 庄宇,万佳磊,王兴璐. 基于元胞自动机的自动驾驶技术对交通运行的影响研究[J], 现代交通技术,2018(15),71-75.
[8] Correia, G. H. d. A., & van Arem, B. Solving the User Optimum Privately-Owned Automated Vehicles Assignment Problem (UO-POAVAP): A model to explore the impacts of self-driving vehicles on urban mobility[J]. Transportation Research Part B: Methodological, 2016(03)
[9] Fagnant D J, Kockelman K M. The Travel and Environmental Implications of Shared Autonomous Vehicles, Using Agent-based Model Scenarios[J]. Transportation Research Part C: Emerging Technologies, 2014(40): 1-13.
[10]王远桂,何欢. 人工智能2.0给自动驾驶发展带来的影响[J].现代电信科技,2017,47(4):20-24.
[11]谢思源, 易维良, 雷旭升. 无人驾驶技术影响下街道空间优化设计浅探[U]. 2018中国城市规划年会
[12]牛方曲. LUTI模型的概念结构、实现方法及发展趋势[J]. 地理科学, 37 (1)
[13] Wegener, M., & Fürst, F. Land-use Transport Interaction: State of the Art[M].1999
[14] Provincie Utrecht. Provincieel Arbeidsplaatsen Register (PAR)[ EB/OL].2013[2018-9-13] http://nationaalgeoregister.nl/geonetwork/srv/dut/catalog.search/metadata/c60f9763-5bfd-49c1-8a86-f3e9552860e6
[15] Provincie Utrecht.Verkeer en vervoer: infrastructuur[EB/OL].2016[2018-9-13]. http://geoservices.provincieutrecht.nl/arcgis/services/wfs_v01_verkeer_vervoer_infrastructuur/MapServer/WFSServer?SERVICE=WFS&VERSION=1.0.0.
撰稿:陆晓琳、江捷
深圳市城市交通规划设计研究中心交通规划一院、城市交通研究院

















 1528
1528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









