






- 🍨 本文为🔗365天深度学习训练营 中的学习记录博客
- 🍖 原作者:K同学啊 | 接辅导、项目定制
🏡我的环境:
- 语言环境:Python3.11.4
- 编译器:Jupyter Notebook
- torcch版本:2.0.1
目录
一、前期工作
设置环境:
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
import torchvision
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
device
#输出结果,表示该设备使用cpu
device(type='cpu')导入数据:
torchvision.datasets是Pytorch自带的一个数据库,我们可以通过代码在线下载数据,这里使用的是torchvision.datasets中的MNIST数据集。
torchvision.datasets.MNIST(root, train=True, transform=None, target_transform=None, download=False)- root (string) :数据地址
- train (string) :
True-训练集,False-测试集
- download (bool,optional) : 如果为
True,从互联网上下载数据集,并把数据集放在root目录下。
- transform (callable, optional ):这里的参数选择一个你想要的数据转化函数,直接完成数据转化
- target_transform (callable,optional) :接受目标并对其进行转换的函数/转换。
torch.utils.data.DataLoader是Pytorch自带的一个数据加载器,结合了数据集和取样器,并且可以提供多个线程处理数据集。
torch.utils.data.DataLoader(dataset, batch_size=1, shuffle=None, sampler=None, batch_sampler=None, num_workers=0, collate_fn=None, pin_memory=False, drop_last=False, timeout=0, worker_init_fn=None, multiprocessing_context=None, generator=None, *, prefetch_factor=2, persistent_workers=False, pin_memory_device='')- dataset(string) :加载的数据集
- batch_size (int,optional) :每批加载的样本大小(默认值:1)
- shuffle(bool,optional) : 如果为
True,每个epoch重新排列数据。 - sampler (Sampler or iterable, optional) : 定义从数据集中抽取样本的策略。 可以是任何实现了 __len__ 的 Iterable。 如果指定,则不得指定 shuffle 。
- batch_sampler (Sampler or iterable, optional) : 类似于sampler,但一次返回一批索引。与 batch_size、shuffle、sampler 和 drop_last 互斥。
- num_workers(int,optional) : 用于数据加载的子进程数。 0 表示数据将在主进程中加载(默认值:0)。
- pin_memory (bool,optional) : 如果为 True,数据加载器将在返回之前将张量复制到设备/CUDA 固定内存中。 如果数据元素是自定义类型,或者collate_fn返回一个自定义类型的批次。
- drop_last(bool,optional) : 如果数据集大小不能被批次大小整除,则设置为 True 以删除最后一个不完整的批次。 如果 False 并且数据集的大小不能被批大小整除,则最后一批将保留。 (默认值:False)
- timeout(numeric,optional) : 设置数据读取的超时时间 , 超过这个时间还没读取到数据的话就会报错。(默认值:0)
- worker_init_fn(callable,optional) : 如果不是 None,这将在步长之后和数据加载之前在每个工作子进程上调用,并使用工作 id([0,num_workers - 1] 中的一个 int)的顺序逐个导入。 (默认:None)
#训练集划分
train_ds = torchvision.datasets.MNIST('data',
train=True, #True为训练集
transform=torchvision.transforms.ToTensor(),
download=True)
#测试集划分
test_ds = torchvision.datasets.MNIST('data',
train=False, #False为测试集
transform=torchvision.transforms.ToTensor(),
download=True)
#Tensor是pytorch中包含单一数据类型的高维矩阵
batch_size = 32#每批加载的样本大小设置为32(默认值为1)
train_dl = torch.utils.data.DataLoader(train_ds,
batch_size=batch_size,
shuffle=True)#每个epoch重新排列数据
test_dl = torch.utils.data.DataLoader(test_ds,
batch_size=batch_size)
import numpy as np
# 指定图片大小,图像大小为20宽、5高的绘图(单位为英寸inch)
plt.figure(figsize=(20, 5))
for i, imgs in enumerate(imgs[:20]):
# 维度缩减
npimg = np.squeeze(imgs.numpy())
# 将整个figure分成2行10列,绘制第i+1个子图。
plt.subplot(2, 10, i+1)
plt.imshow(npimg, cmap=plt.cm.binary)#matplotlib.pyplot.imshow(X, cmap=None),其中“X: 要绘制的图像或数组。”“cmap: 颜色图谱(colormap), 默认绘制为RGB(A)颜色空间。“
plt.axis('off')
plt.show()#Jupyter notebook不需要,pycharm则需二、构建简单的CNN网络
卷积基(卷积层、池化层)被认为是用于提取图像特征的,全连接层被认为是对图像特征进行分类的。
- nn.Conv2d为卷积层,用于提取图片的特征,传入参数为输入channel,输出channel,池化核大小
- nn.MaxPool2d为池化层,进行下采样,用更高层的抽象表示图像特征,传入参数为池化核大小
- nn.ReLU为激活函数,使模型可以拟合非线性数据
- nn.Linear为全连接层,可以起到特征提取器的作用,最后一层的全连接层也可以认为是输出层,传入参数为输入特征数和输出特征数(输入特征数由特征提取网络计算得到,如果不会计算可以直接运行网络,报错中会提示输入特征数的大小,下方网络中第一个全连接层的输入特征数为1600)
- nn.Sequential可以按构造顺序连接网络,在初始化阶段就设定好网络结构,不需要在前向传播中重新写一遍
import torch.nn.functional as F
num_classes = 10 # 图片的类别数
class Model(nn.Module):
def __init__(self):
super().__init__()
# 特征提取网络
self.conv1 = nn.Conv2d(1, 32, kernel_size=3) # 第一层卷积,卷积核大小为3*3
self.pool1 = nn.MaxPool2d(2) # 设置池化层,池化核大小为2*2
self.conv2 = nn.Conv2d(32, 64, kernel_size=3) # 第二层卷积,卷积核大小为3*3
self.pool2 = nn.MaxPool2d(2)
# 分类网络
self.fc1 = nn.Linear(1600, 64)
self.fc2 = nn.Linear(64, num_classes)
# 前向传播
def forward(self, x):
x = self.pool1(F.relu(self.conv1(x)))
x = self.pool2(F.relu(self.conv2(x)))#特征的概念,特征本质上就是一个属性,当其与任务密集相关时就是有效特征,当其与任务无关时就是噪声数据。在深度学习中,通常使用relu或者其变种函数作为激活函数,其会对负值区域进行抑制,而对正值区域进行保留。也就是说,在深度学习中,卷积基输出的值越大,则表明特征响应强度越大。
x = torch.flatten(x, start_dim=1)#Flatten层用来将输入“压平”,即把多维的输入一维化,常用在从卷积层到全连接层的过渡。Flatten不影响batch的大小。就是把高纬度的数组按照 x轴或者y轴 进行拉伸,变成一维的数组
x = F.relu(self.fc1(x))
x = self.fc2(x)
return x
from torchinfo import summary
model = Model().to(device)#打印模型
summary(model)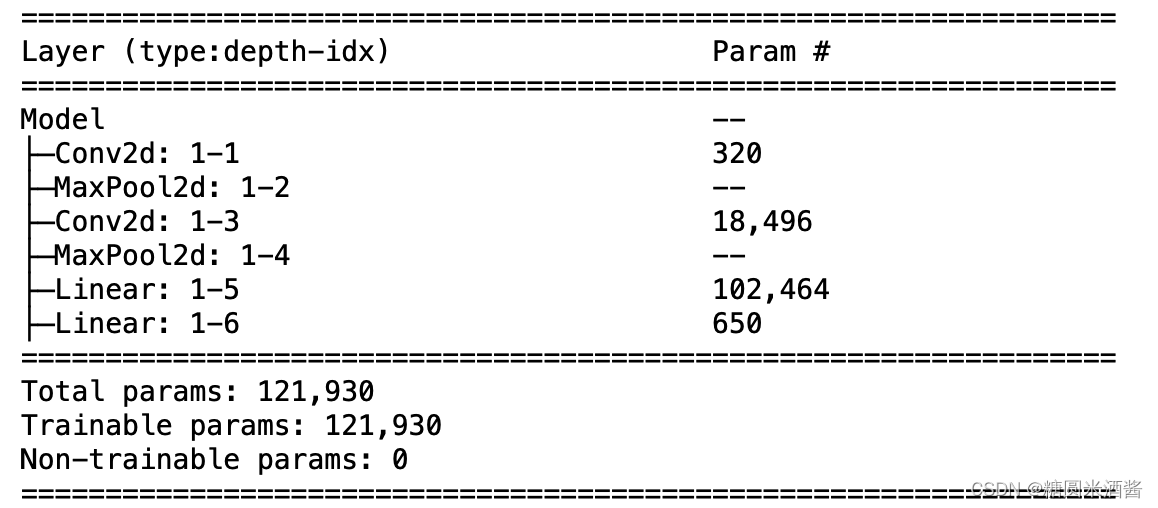
三、训练模型
设置超参数:
torch.optim是一个实现了各种优化算法的库。大部分常用的方法得到支持,并且接口具备足够的通用性,使得未来能够集成更加复杂的方法。为了使用torch.optim,你需要构建一个optimizer对象。这个对象能够保持当前参数状态并基于计算得到的梯度进行参数更新。其中的SGD是optim中的一个算法(优化器):随机梯度下降算法。
梯度下降法的基本思想可以类比为一个下山的过程。
假设这样一个场景:一个人被困在山上,需要从山上下来(找到山的最低点,也就是山谷)。但此时山上的浓雾很大,导致可视度很低;因此,下山的路径就无法确定,必须利用自己周围的信息一步一步地找到下山的路。这个时候,便可利用梯度下降算法来帮助自己下山。怎么做呢,首先以他当前的所处的位置为基准,寻找这个位置最陡峭的地方,然后朝着下降方向走一步,然后又继续以当前位置为基准,再找最陡峭的地方,再走直到最后到达最低处;同理上山也是如此,只是这时候就变成梯度上升算法了简单来说,就是找一个函数的极值点,不一定是最值。
(梯度下降基本思想原文:https://blog.csdn.net/weixin_43526268/article/details/124307816)
loss_fn = nn.CrossEntropyLoss() # 创建损失函数
learn_rate = 1e-2 # 学习率
opt = torch.optim.SGD(model.parameters(),lr=learn_rate)#torch.optim.SGD是PyTorch中实现的Stochastic Gradient Descent(SGD)优化器,用于更新神经网络中的参数,以最小化损失函数,从而提高模型的精度。编写训练函数 :
1. optimizer.zero_grad()
函数会遍历模型的所有参数,通过内置方法截断反向传播的梯度流,再将每个参数的梯度值设为0,即上一次的梯度记录被清空。
2. loss.backward()
PyTorch的反向传播(即tensor.backward())是通过autograd包来实现的,autograd包会根据tensor进行过的数学运算来自动计算其对应的梯度。
具体来说,torch.tensor是autograd包的基础类,如果你设置tensor的requires_grads为True,就会开始跟踪这个tensor上面的所有运算,如果你做完运算后使用tensor.backward(),所有的梯度就会自动运算,tensor的梯度将会累加到它的.grad属性里面去。
更具体地说,损失函数loss是由模型的所有权重w经过一系列运算得到的,若某个w的requires_grads为True,则w的所有上层参数(后面层的权重w)的.grad_fn属性中就保存了对应的运算,然后在使用loss.backward()后,会一层层的反向传播计算每个w的梯度值,并保存到该w的.grad属性中。
如果没有进行tensor.backward()的话,梯度值将会是None,因此loss.backward()要写在optimizer.step()之前。
3. optimizer.step()
step()函数的作用是执行一次优化步骤,通过梯度下降法来更新参数的值。因为梯度下降是基于梯度的,所以在执行optimizer.step()函数前应先执行loss.backward()函数来计算梯度。
注意:optimizer只负责通过梯度下降进行优化,而不负责产生梯度,梯度是tensor.backward()方法产生的。
# 训练循环
def train(dataloader, model, loss_fn, optimizer):
size = len(dataloader.dataset) # 训练集的大小,一共60000张图片
num_batches = len(dataloader) # 批次数目,1875(60000/32)
train_loss, train_acc = 0, 0 # 初始化训练损失和正确率
for X, y in dataloader: # 获取图片及其标签
X, y = X.to(device), y.to(device)
# 计算预测误差
pred = model(X) # 网络输出
loss = loss_fn(pred, y) # 计算网络输出和真实值之间的差距,targets为真实值,计算二者差值即为损失
# 反向传播
optimizer.zero_grad() # grad属性归零
loss.backward() # 反向传播
optimizer.step() # 每一步自动更新
# 记录acc与loss
train_acc += (pred.argmax(1) == y).type(torch.float).sum().item()
#准确率,(pred.argmax(1) == y)是一个布尔值,其中等号是否成立代表对应样本的预测是否正确(True 表示正确,False 表示错误)。
#.type(torch.float)是将布尔数组的数据类型转换为浮点数类型,即将 True 转换为 1.0,将 False 转换为 0.0。
# .sum()是对数组中的元素求和,计算出预测正确的样本数量。
#.item()将求和结果转换为标量值,以便在 Python 中使用或打印。
#(pred.argmax(1) == y).type(torch.float).sum().item()表示计算预测正确的样本数量,并将其作为一个标量值返回。这通常用于评估分类模型的准确率或计算分类问题的正确预测数量。
train_loss += loss.item()#损失率
train_acc /= size
train_loss /= num_batches
return train_acc, train_loss编写测试函数:
def test (dataloader, model, loss_fn):
size = len(dataloader.dataset) # 测试集的大小,一共10000张图片
num_batches = len(dataloader) # 批次数目,313(10000/32=312.5,向上取整)
test_loss, test_acc = 0, 0
# 当不进行训练时,停止梯度更新,节省计算内存消耗
with torch.no_grad():
for imgs, target in dataloader:
imgs, target = imgs.to(device), target.to(device)
# 计算loss
target_pred = model(imgs)
loss = loss_fn(target_pred, target)
test_loss += loss.item()
test_acc += (target_pred.argmax(1) == target).type(torch.float).sum().item()
test_acc /= size
test_loss /= num_batches
return test_acc, test_loss正式训练:
1. model.train()
model.train()的作用是启用 Batch Normalization 和 Dropout。
如果模型中有BN层(Batch Normalization)和Dropout,需要在训练时添加model.train()。model.train()是保证BN层能够用到每一批数据的均值和方差。对于Dropout,model.train()是随机取一部分网络连接来训练更新参数。
2. model.eval()
model.eval()的作用是不启用 Batch Normalization 和 Dropout。
如果模型中有BN层(Batch Normalization)和Dropout,在测试时添加model.eval()。model.eval()是保证BN层能够用全部训练数据的均值和方差,即测试过程中要保证BN层的均值和方差不变。对于Dropout,model.eval()是利用到了所有网络连接,即不进行随机舍弃神经元。
训练完train样本后,生成的模型model要用来测试样本。在model(test)之前,需要加上model.eval(),否则的话,有输入数据,即使不训练,它也会改变权值。这是model中含有BN层和Dropout所带来的的性质。
epochs = 5#遍历完一整个数据集,称为一个epoch
train_loss = []
train_acc = []
test_loss = []
test_acc = []
for epoch in range(epochs):
model.train()
epoch_train_acc, epoch_train_loss = train(train_dl, model, loss_fn, opt)
model.eval()
epoch_test_acc, epoch_test_loss = test(test_dl, model, loss_fn)
train_acc.append(epoch_train_acc)
train_loss.append(epoch_train_loss)
test_acc.append(epoch_test_acc)
test_loss.append(epoch_test_loss)
template = ('Epoch:{:2d}, Train_acc:{:.1f}%, Train_loss:{:.3f}, Test_acc:{:.1f}%,Test_loss:{:.3f}')
print(template.format(epoch+1, epoch_train_acc*100, epoch_train_loss, epoch_test_acc*100, epoch_test_loss))
print('Done')
四、结果可视化
import matplotlib.pyplot as plt
#隐藏警告
import warnings
warnings.filterwarnings("ignore") #忽略警告信息
plt.rcParams['font.sans-serif'] = ['SimHei'] # 用来正常显示中文标签
plt.rcParams['axes.unicode_minus'] = False # 用来正常显示负号
plt.rcParams['figure.dpi'] = 100 #分辨率
epochs_range = range(epochs)
plt.figure(figsize=(12, 3))
plt.subplot(1, 2, 1)#划分为两个1行两个图,当前是第一个图
plt.plot(epochs_range, train_acc, label='Training Accuracy')
plt.plot(epochs_range, test_acc, label='Test Accuracy')
plt.legend(loc='lower right')#标签在右下角
plt.title('Training and Validation Accuracy')
plt.subplot(1, 2, 2)
plt.plot(epochs_range, train_loss, label='Training Loss')
plt.plot(epochs_range, test_loss, label='Test Loss')
plt.legend(loc='upper right')#标签在右上角
plt.title('Training and Validation Loss')
plt.show()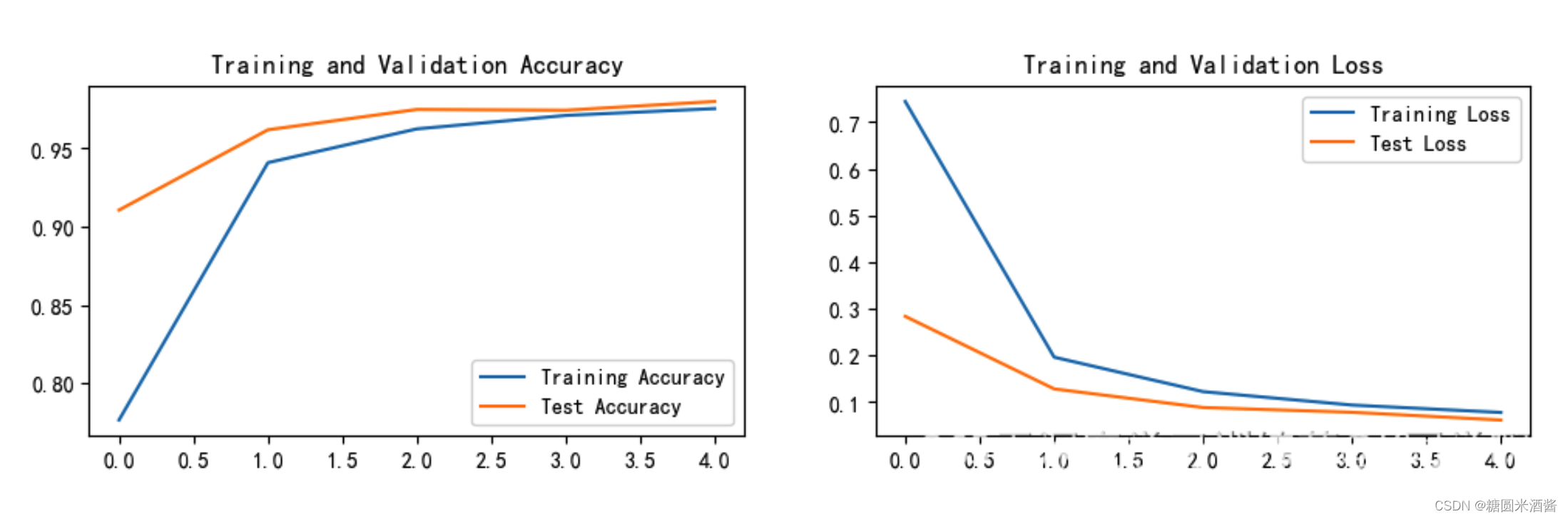
五、知识点总结(所遇问题总结)
由于这是在一个新建的虚拟环境下进行的,需要将需要的包提前下载“pip install 所需包”,再倒入数据的时候,在查阅图片的时候,Jupyter notebook环境下无需“ plt show()”进行展示。为什么我们还要进行多次epoch呢,因为通常我们得到的线性函数不会这么简单,可能有多个凸点,遍历多次之后才有可能找到最小点而不是极小点。















 1569
1569











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









