







土地利用和土地覆盖,即 Land Use and Land cover(LULC)。
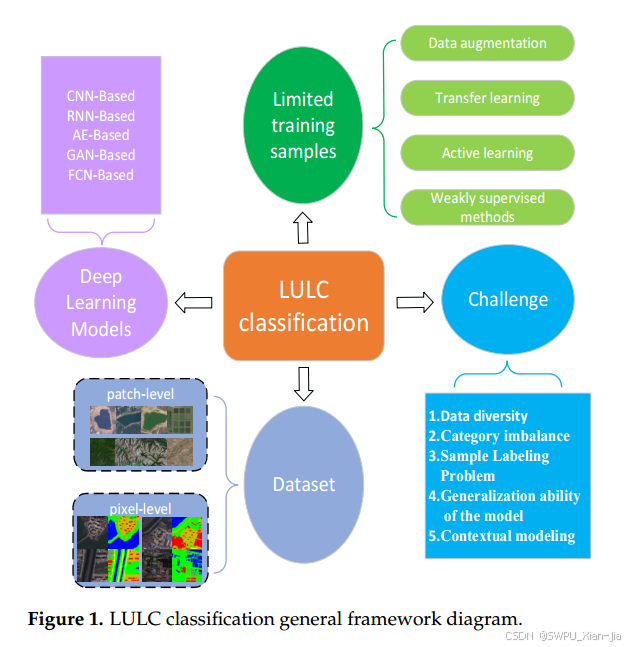
1. LULC分类的五种常用深度学习模型
- CNN-Based;
- RNN-Based,主要用于时序数据;
- GAN-Based,近两年比较流行,可以解决类别不平衡、跨区域自适应学习、数据增强等问题;
- AE-Based,更好地提取遥感图像中的低维特征并捕获关键信息;
- FCN-Based,可以很好地捕获遥感图像中的空间信息,实现多尺度特征学习等优势。
2. 公开数据集
2.1 补丁级数据集
补丁级数据集是指将固定大小的图像分配给特定的特征类,主要用于遥感图像场景分类。
2.2 像素级数据集
像素级数据集主要用于遥感图像的语义分割。像素级样本将每个像素点视为一个样本,并将其分配到相应的类别中。LULC 分类主要是使用像素级数据集,目前有4个像素级基准数据集:
- Indian Pines:由NASA于2015年创建,是第一个提出用于土地覆盖分类的公共数
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1888
1888

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









