






一、TH方程介绍
1.相对运动微分方程
首先需要介绍目标星的VVLH坐标系,以及惯性系的X,Y,Z轴的指向。Y轴指向轨道的反法向,Z轴指向目标星矢径的反方向,X轴符合右手准则。
在惯性系下,对于目标星建立微分方程可以写为
(1)
追踪星的微分方程可以写为
(2)
其中
所以
假设追踪星和目标星的相对距离相对于地球的距离非常小,即
于是
(3)
以上近似对于近距离交会是有效的。由(2)式减去(1)式得到
(4)
在目标航天器坐标系的VVLH坐标系下是方便的。这个轨道坐标系通常用于描述两个航天器之间的相对动力学。一般来说,惯性坐标系中任意矢量A的时间导数可以用相对于旋转坐标系的偏差表示为
上式应用两次,得到新的等式
(5)
上述等式表示在旋转坐标系下的位置和速度
在目标轨道坐标系下,其角速度向量和位置向量,表达式如下:
其中是目标轨道角速度的大小,R是目标地球到航天器的距离,在目标航天器坐标系下的相对位置
根据计算
根据角动量的关系,其中
是目标航天器的角动量,我们能够定义常值k为
在目标航天的轨道坐标系下,其航天器的微分方程可以写为
(7)
唯一的假设是,追逐者和目标之间的距离比目标和地球中心之间的距离很小,上式适用于任意偏心度的轨道。同时为了简化问题,假设
这个意味着追踪者是不额外添加其他外力,同时追踪星和目标星受到的摄动力是相同的。最终目的是来求解该微分方程。
2.相对运动方程的简化
为了将1中所得到的微分方程(7)简化,采用将真近地点角作为变量,而不是选择时间作为变量。形式被改写成如下形式
因为真近点角是随着时间t单调递增,目标航天器的独立变量能够从时间t换成真近地点角
。任意变量a与时间相关的导数变为
二次求导
将关于真近地点角的导数写为如下形式
上式可以写成如下形式
,将该表达式代入式(7)可以得到
(8)
对于角动量,得到
因此,这个微分方程可以简化为
(9)
根据独立变量变化的形式
得到
对于其他两个坐标也是同样的结果,得到相对运动方程为
(10)
y的部分是和谐的振荡。它能被解析求出来,其结果为
对于x,z部分,等式其中
是积分常值
当这个等式添加到z的表达式,得到
(11)
这个问题现在简化为解决前面的微分方程
3.新的解析解的提出
根据作者之前写的《不含一阶导数项的线性二阶微分方程的通解》,要求解(11)式,首先需要求出其齐次项的通解,即求解
(12)
可以求出其两个不相关的齐次线性方程解,可以写为
(13)
其中,其求出的朗斯基行列式为
对于椭圆轨道,
因此可以证明两个解是线性独立的。当这些线性独立解被使用,式(11)的特解可以被计算得到
(14)
如果按照下面等式插入,
可以得到特解
,因此得到
上式可以重新写成
将该表达式代入x的微分方程中
它能够被积分成
其中是一个积分常值。为了方便,我们重新定义积分常值为
所以最后
如果我们使用一种类似于CW的形式
所以上式又可以简写为
将上式对求导得到
如果表达成平面内的形式,这个不等式可以写为
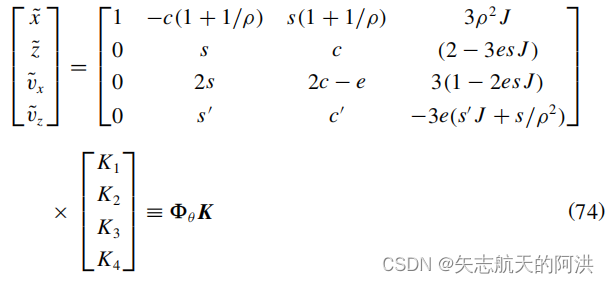
其中
我们需要的状态转移矩阵,可以在任意时刻将初始状态传播到最终状态位置,这个不等式能够获得通过插入初始状态求出K值,根据上面获得的式子得到了,根据J的关系
所以上式可以写为
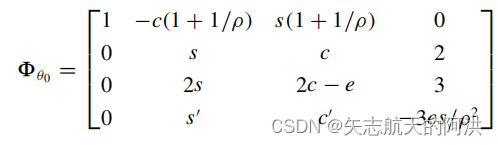 求出行列式
求出行列式
得到,求出
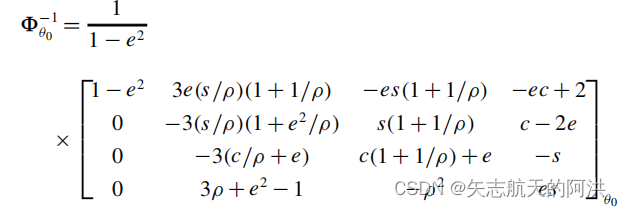 所以K值即
所以K值即
其中,因此任意矩阵可以由等式求出
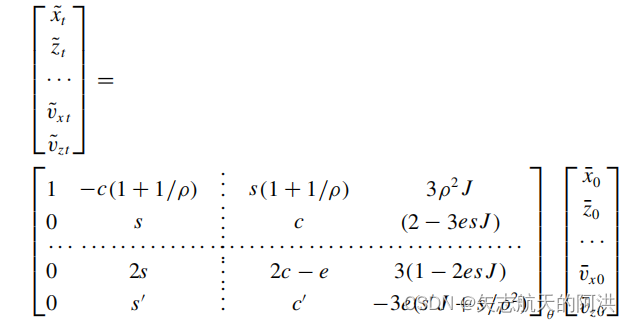
关于y轴的方向,可以由下列等式求出
最后介绍一下与
的转换关系
而可以通过开普勒方程求解得到。下一节将通过编程实现上述算法。

















 125
125

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









