







参考
【三维重建】【深度学习】【数据集】基于COLMAP制作自己的NeuS(DTU格式)数据集
https://github.com/Totoro97/NeuS/tree/main/preprocess_custom_data
一、视频抽帧成照片
参考链接:四、自建数据集渲染
这一部分主要参考我上面发的链接,之前是自制instant-ngp数据集时使用的,主要将你拍摄的视频抽帧成不同视角下的图片,并且生成transform.josn文件,在自制NeuS数据集时不需要transform.josn文件,因此只需要将抽帧的图片放到自己后续步骤的文件夹即可。
二、利用colmap进行特征提取、匹配和稀疏点云重建
1、创建工程
点击File -> New project 以新建一个项目。(将抽帧好的图片放进这个文件夹)
注:首先要确定好自己的文件名称,然后在project窗口处导入刚刚抽帧好的图片,Database处明确自己的文件路径,将自己数据集的database进行命名:****.db。这样工程就创建完成了。
2、特征提取与特征匹配
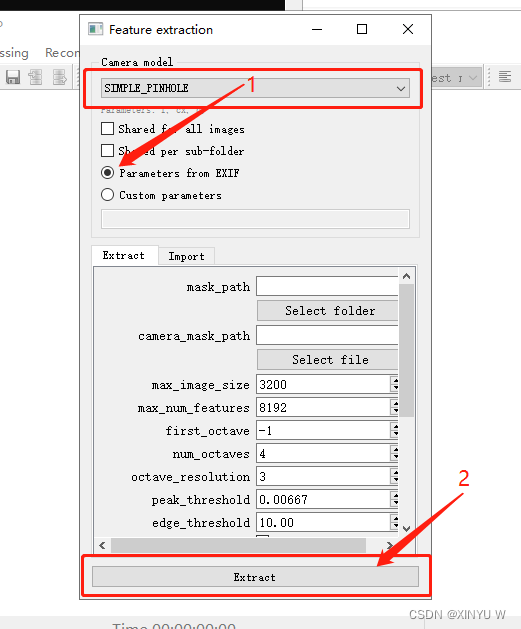
特征提取,点击Processing -> Feature extraction,Camera model选择SIMPLE_PINHOLE,其他配置使用默认配置即可,点击Extract后,自动开始提取图片特征。特征匹配后关闭窗口。
特征匹配,点击Processing -> Feature matching,使用默认配置直接点击Run进行特征匹配。
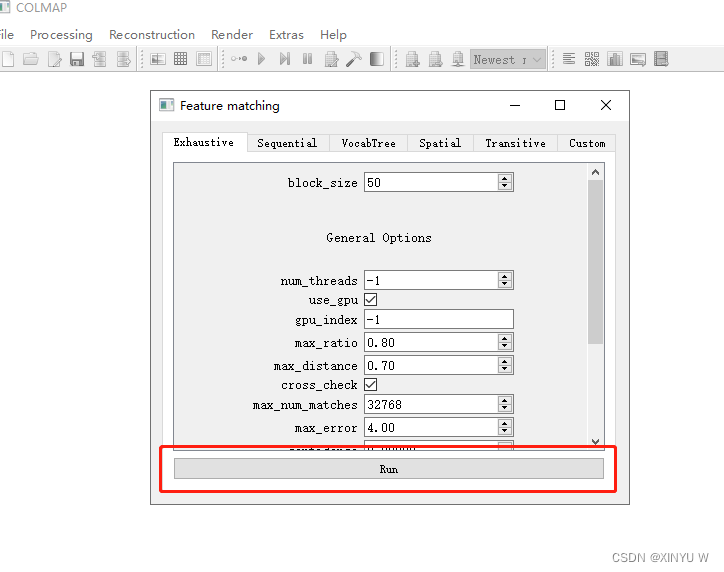
待特征匹配完毕后关闭窗口。
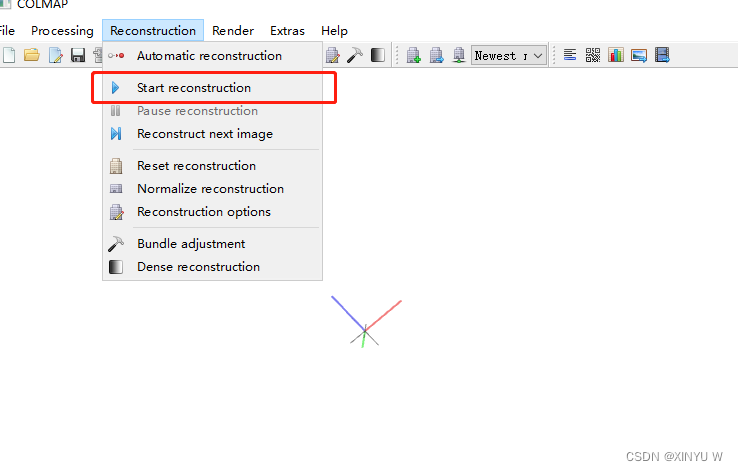
3、稀疏点云重建
点击Reconstruction -> Start reconstruction进行重建。
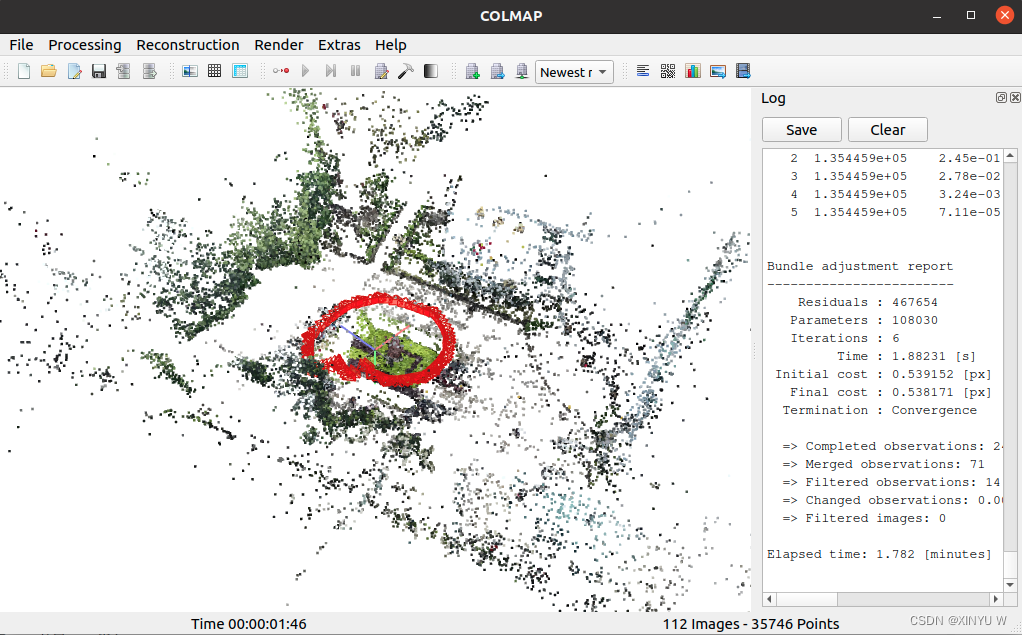
4、保存项目
在创建项目的文件夹中先创建两个文件夹:sparse/0。然后将项目的信息保存在0文件夹中,最终经过colmap处理的文件内容排版大致如下:
cy(总文件夹名称)
|
| images
| | |-- 0001.jpg
| | |-- 0002.png
| | ...
|
| images_colmap.db
|
| sparse
| |0
| | |-- cameras.bin
| | |-- images.bin
| | |-- points3D.bin
| | |-- cproject.ini 三、将数据转换成LLFF格式
1、下载LLFF代码
:http://git clone https://github.com/Fyusion/LLFF.git
注:在接下来的步骤中要把自己的conda环境切换成NeuS的环境
有些依赖项缺失需要下载:
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple scikit-image
pip install -i https://pypi.tuna.tsinghua.edu.cn/simple imageio2、运行LLFF代码
我们主要用的是LLFF中的imgs2poses.py文件,我先将自己的数据集放在LLFF文件夹中,imgs2poses.py文件中的代码我没有修改,我主要对数据集文件夹的位置进行调整。
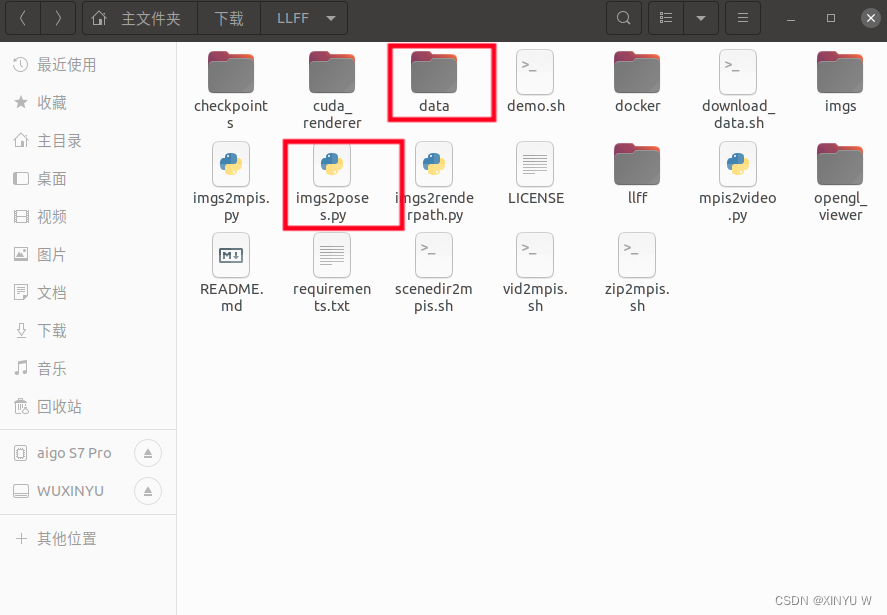

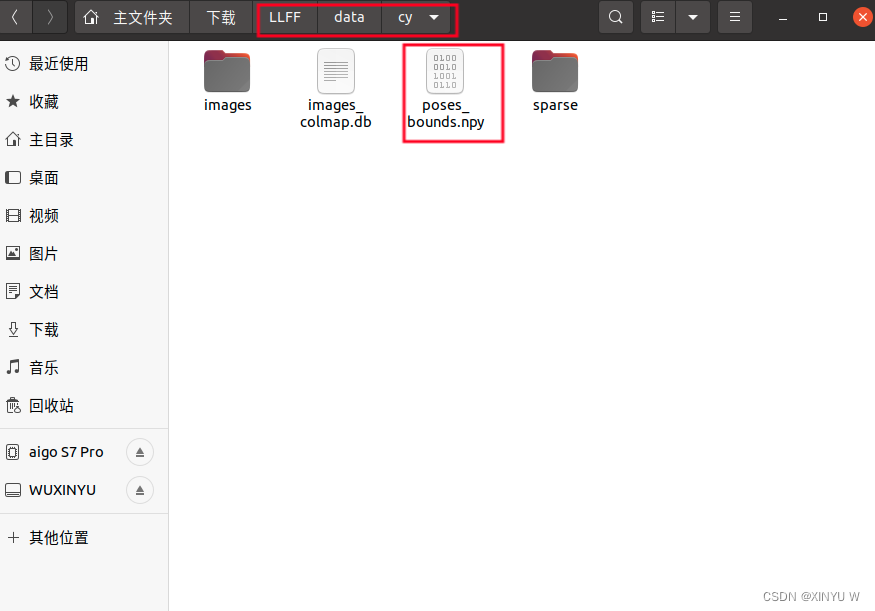
将数据集的位置调整好后就可以运行代码了,要在LLFF文件夹内进行运行哦
python imgs2poses.py "data/cyxk"运行后结束会显示Done with imgs2poses,并且生成pose_bounds.npy文件。由于我的窗口给关闭了,没法直观性的截图给大家看,请uu们谅解一下。一般我在这遇到的错误就是没有找到数据集的图片,所以为了保险起见先将自己的数据集放在LLFF文件夹内,然后再剪切到指定的位置中去。
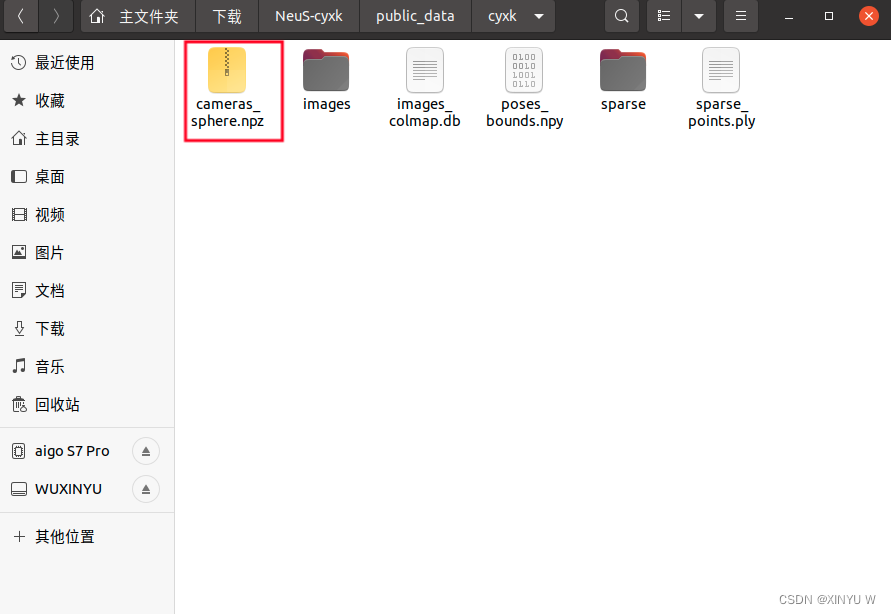
四、转换成DTU格式
这一部分我主要参考转成DTU数据的格式
并且这位博主也提供了将LLFF数据格式转换成DTU格式的代码,在这里我也不过多赘述啦,最后会生成cameras_sphere.npz文件。最后数据集的整体格式如下:
cyxk(总文件夹名称)
|
| images
| | |-- 0001.jpg
| | |-- 0002.png
| | ...
|
| images_colmap.db
|
| sparse
| |0
| | |-- cameras.bin
| | |-- images.bin
| | |-- points3D.bin
| | |-- cproject.ini
|
| cameras_sphere.npz
|
| poses_bounds.npy
|
| sparse_points.ply
|
|
| 做到这一步,自制的NeuS数据集已经完成了,可以用自己的数据集进行训练,但是NeuS中的DTU数据集中含有掩码图像,我们这没有,因此在训练的时候采用无掩码监督进行训练,其中在NeuS源码中的dataset.py文件中要进行修改,一定要检查输入的图像有没有改成.jpg存放图像的文件夹和代码中的路径有没有不一致的情况,一些细节还是需要注意的。
最后再次感谢博主:牙牙要健康


















 4264
4264

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











