







一、数据融合
先举一个例子:有两个秤,A秤测得某个物体重30g(记为Z1),它的标准差是2g(记为σ1);B
秤测得该物体重32g(记为Z2),它的标准差是4g(记为σ2)。 那如果根据这两个测量值去估计
该物体的重量,则可以用最优化的思想。
定义:Z_Hat(估计值) = Z1 + K * (Z2 - Z1)
K = 0时,Z_Hat = Z1,而K = 1时,Z_Hat = Z2;K在0~1范围内
可以寻求Z_Hat的方差最小的时候,得到最优的估计值。Z_Hat的方差 = Z1 + K *(Z2 - Z1)这个
整体的方差,这个整体可化成(1 - K)* Z1 + K * Z2,而Z1跟Z2是由两个独立的秤测出来的,那
么这个整体的方差有等于各自的方差之和,也就是(1 - K)* Z1的方差 + K * Z2的方差。由于知道
了Z1和Z2的标准差,那个这个整体的方差,其实就是关于K的一个二次函数(注意,求K * Z2的方
差,应该等于K^2 * Z2的方差),寻求K值使得这个整体的方差最小,就能够得到最优的估计值,
最后求的测量值是30.4g,它的标准差是1.79g
这个过程就是数据融合
二、协方差矩阵
将方差和协方差通过矩阵表现出来
(1)方差的回顾
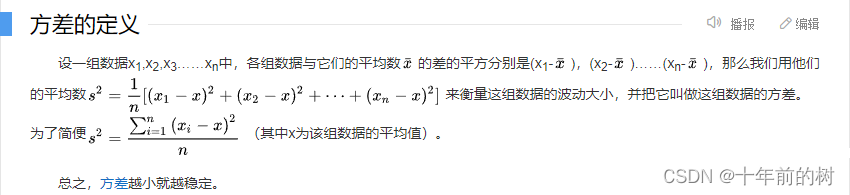
方差是表示数据离散程度的量,也就是说方差等于平方的期望减去期望的平方。
根据方差与期望之间的关系:
D(X)=E{【X-E(x)】^2 }
=E{ X^2 - 2X * E(X)+【E(x)】^2 }
=E(x^2) - 2E(x) * E(x) +【E(x)】^2
=E(x^2) - E(x)^2
把E(x)看成是一个常数,因为E(X)是已经求得的数学期望 ,而常数的期望就是本身。
(2)协方差是什么
协方差的通俗讲解:如何通俗地解释协方差_哔哩哔哩_bilibili
其中协方差是体现变量之间的联动关系或者说是相关性,比如有两个变量X,Y,如果他们有相同
的变化趋势,则称为正相关,此时协方差>0;如果他们有相反的变化趋势,则成为负相关,此时
协方差<0;如果他们不相关,此时协方差 = 0。
协方差的表示,可以理解为在二维的平面内,先求出所有样本的加权平均数,把这个点的坐标定为
原点处,其他样本与这个原点构成的长方体的面积再乘上各自出现的概率,这样会得到的一个值,
把所有得到的这个值累加,如果是大于0的,说明两个变量的关系是正相关;如果小于0,说明两个
变量的关系是负相关(可以这么理解:如果所有样本都出现在第三象限,那么这些样本到达原点的
方法,都是横坐标和纵坐标增加,所以两个变量的关系自然是正相关。其他象限也可以这么去理解
推导)
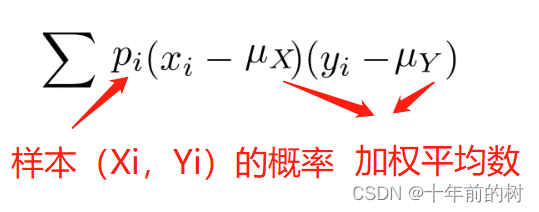
改写成期望的形式如下

(3)协方差矩阵
详解协方差与协方差矩阵_ybdesire的博客-CSDN博客_协方差矩阵
[线性代数] 如何求协方差矩阵_kuang_liu的博客-CSDN博客_协方差矩阵求解
三、状态空间
(1)连续型的状态空间方程表达
d X(t)= A1 * X(t)+ B1 * U(t)
(2)离散型的状态空间方程表达
X(k)= A2 * X(k-1)+ B2 * U(k)
(3)测量型(也是离散型)的状态空间方程表达
Z(k)= H * X(k)
(4)引入不确定性的状态空间方程表达
计算得到的状态变量:X(k)= A2 * X(k-1)+ B2 * U(k)+ W(k-1),引入过程噪音,这部分
是由于模型不够准确所导致的
测量得到的状态变量:Z(k)= H * X(k)+ V(k),引入测量噪音,这部分是由于自然界的干扰
和传感器的精度误差所导致的
我们更希望,测量得到的状态变量,能够尽可能少地包含测量噪音带来的那部分影响;计算得到的
状态变量,能够补充上模型不够准确而缺失的那部分影响
(5)通过卡尔曼滤波器,并将计算得到的和测量得到的状态变量进行数据融合,得到最优的状态
变量的估计值















 230
230











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









