







DUSt3R: Geometric 3D Vision Made Easy
代码:https://github.com/naver/dust3r
目录
DUSt3R: Geometric 3D Vision Made Easy
Abstract:
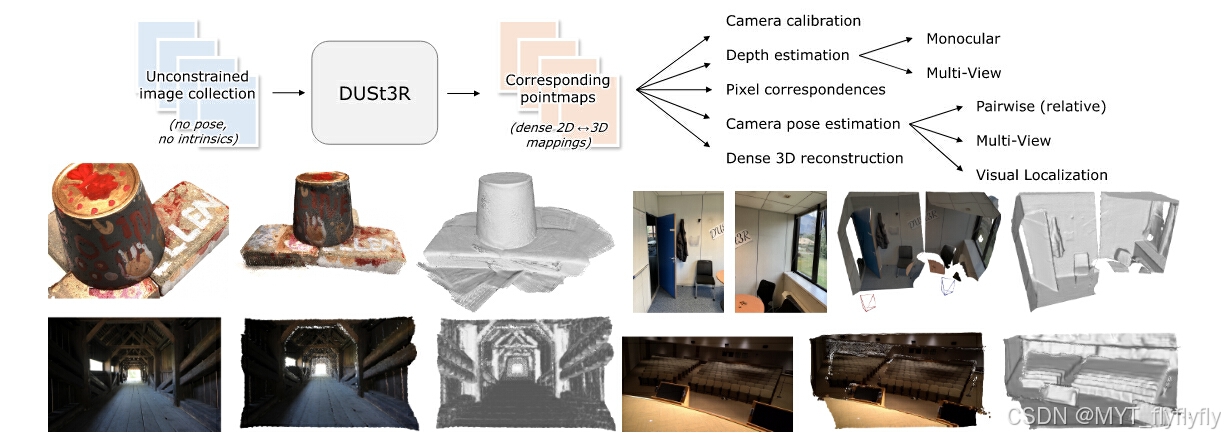
采取了相反的立场并引入了 DUSt3R,用于任意图像集合的密集和无约束立体 3D 重建,无需有关相机校准或视点姿势的先验信息即可运行。在提供两个以上图像的情况下,进一步提出了一种简单而有效的全局对齐策略,该策略将所有成对点图在一个公共参考系中表示。网络架构基于标准的 Transformer 编码器和解码器,能够利用强大的预训练模型。公式直接提供了场景的 3D 模型以及深度信息。总之,DUSt3R 使许多几何 3D 视觉任务变得简单。
核心:
设计目的:高效实现点云生成和三维重建
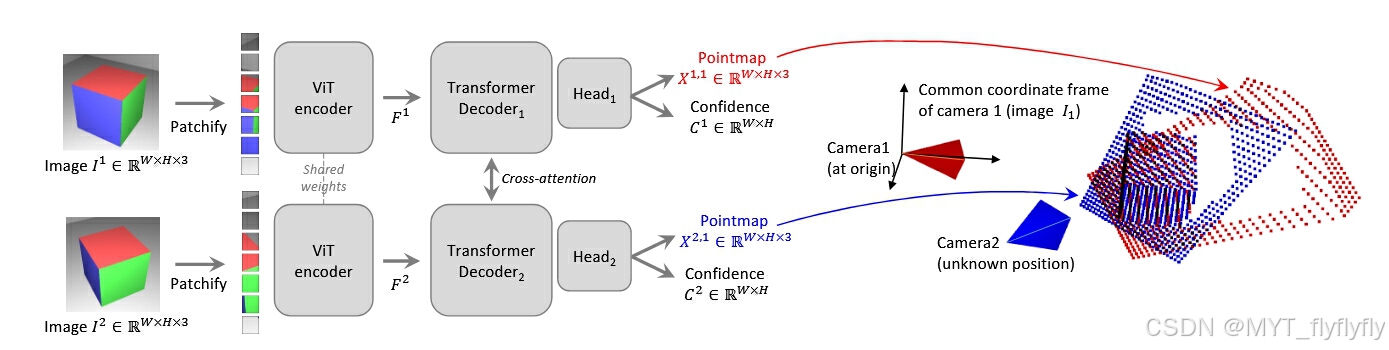
网络架构
网络架构如图 2 所示,它由两个图像组成,每个分支包括一个图像编码器、一个解码器和一个回归头。两个输入图像首先由相同的权重共享 ViT 编码器以连体方式编码,将生成的标记表示 F 1 和 F 2 传递给两个 transformer 解码器,这两个解码器通过不断交换信息。最后,两个回归头输出两个相应的点图和关联的置信度图。重要的是,这两个点图在第一张图像 的同一坐标系中表示。
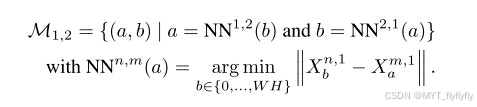
点匹配
根据输出点图进行点匹配:建立两幅图像的像素之间的对应关系可以通过在3D点图空间中的最近邻(NN)搜索来简单地实现
相机内参估计
通过求解简单的优化问题来估计相机固有参数

相对姿态估计
一种方法是进行 2D 匹配并恢复内在函数,然后估计 Epipolar 矩阵并恢复相对姿态
另一种方法是使用 Procrustes 对齐
Procrustes 对齐对噪声和异常值很敏感。更稳健的解决方案是依靠带有 PnP的 RANSAC

绝对姿态估计(视觉定位)
获得的 2D 像素对应关系中运行 PnP-RANSAC,产生 2D-3D 对应关系
根据点云图像与的真实场景之间的比例,通过适当缩放此姿态来将此姿态转换为世界坐标。
创新性:
无需相机校准信息
DUSt3R能够在没有任何相机校准信息(包括相机内参和姿态)的情况下,从任意图像集合中进行密集且无约束的立体3D重建。这与大多数现有的多视图立体重建(MVS)算法不同,后者通常需要这些信息来在3D空间中对齐像素。
点图映射(Pointmap)
该方法提出了一种新的点图映射概念,将成对的图像重建问题视为点图的回归问题,从而放宽了传统投影相机模型的严格约束。这种方法不仅统一了单目和双目重建的情况,而且还能够在多图像情况下,通过一个简单的全局对齐策略,将所有成对点图表达在一个共同的参考框架中。
基于Transformer的网络架构
DUSt3R基于标准的Transformer编码器和解码器构建网络架构,这使得模型能够利用强大的预训练模型,并直接提供场景的3D模型和深度信息。
端到端的3D重建流程
该方法提出了第一个从未经校准的图像中进行端到端3D重建的完整流程,统一了单目和双目3D重建。
全局对齐策略
为了处理更大的场景,DUSt3R引入了一种快速简单的全局对齐后处理优化方法,使得从多个图像中预测的点图能够对齐到一个统一的3D空间中。
贡献:
简化3D重建流程
通过消除对精确相机参数的需求,DUSt3R简化了3D重建的流程,使得用户更容易从图像中获取3D信息,这对于文化遗产保护、建筑建模、机器人导航等领域具有重要意义。
提高效率和准确性
DUSt3R在多个3D视觉任务上展示了优异的性能,包括单目和多视图深度估计以及相对姿态估计,这有助于提高相关应用的效率和准确性。
推动研究进展
该方法在3D视觉任务上设定了新的性能记录,推动了3D重建领域的研究进展。
对未来三维重建的促进作用
推动无约束重建技术的发展
DUSt3R的出现可能会激发更多关于无约束3D重建的研究,进一步减少对精确相机参数的依赖。
提高研究和工业界的效率
DUSt3R的高性能和易用性可能会成为研究和工业界在3D重建任务上的首选方法,从而提高整体的工作效率。
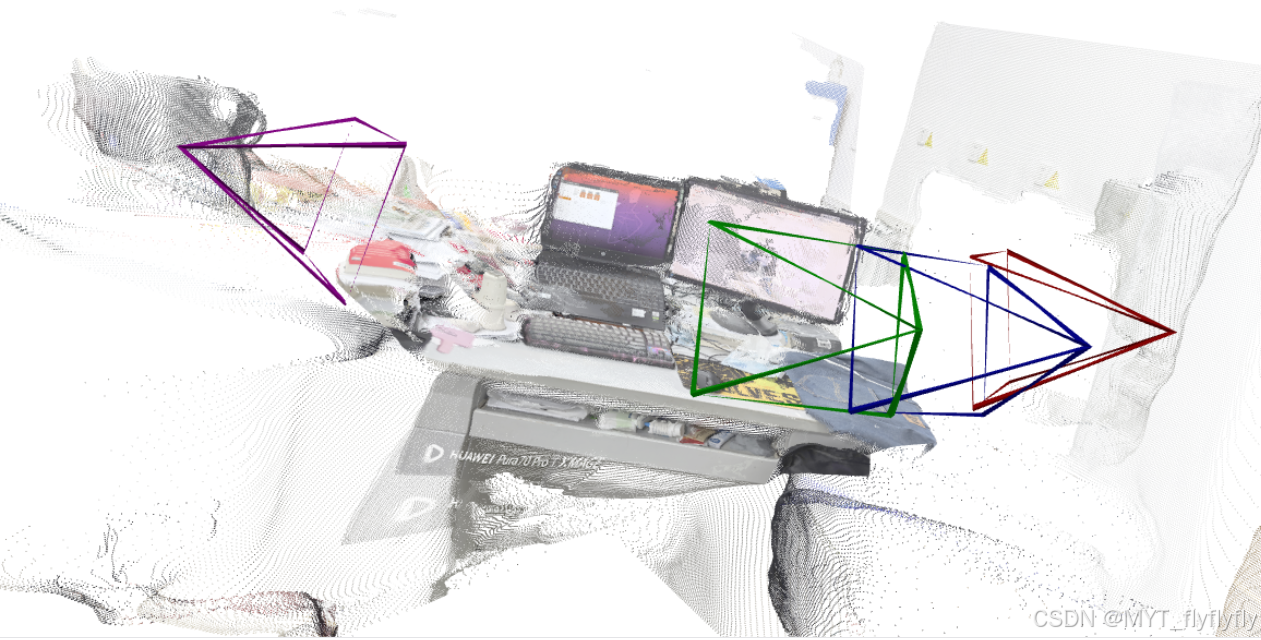
PS(复现结果)
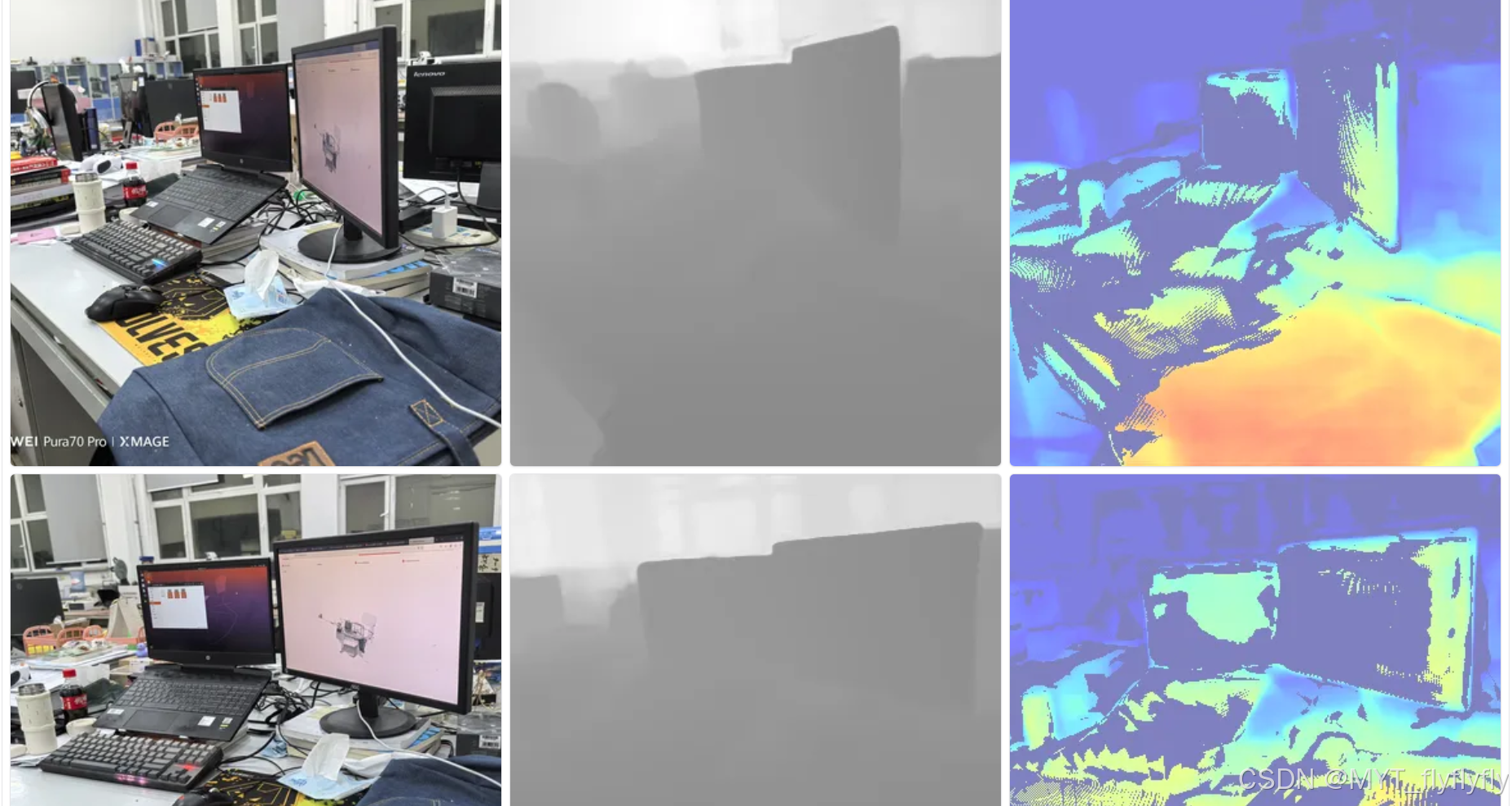

















 720
720

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









