






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
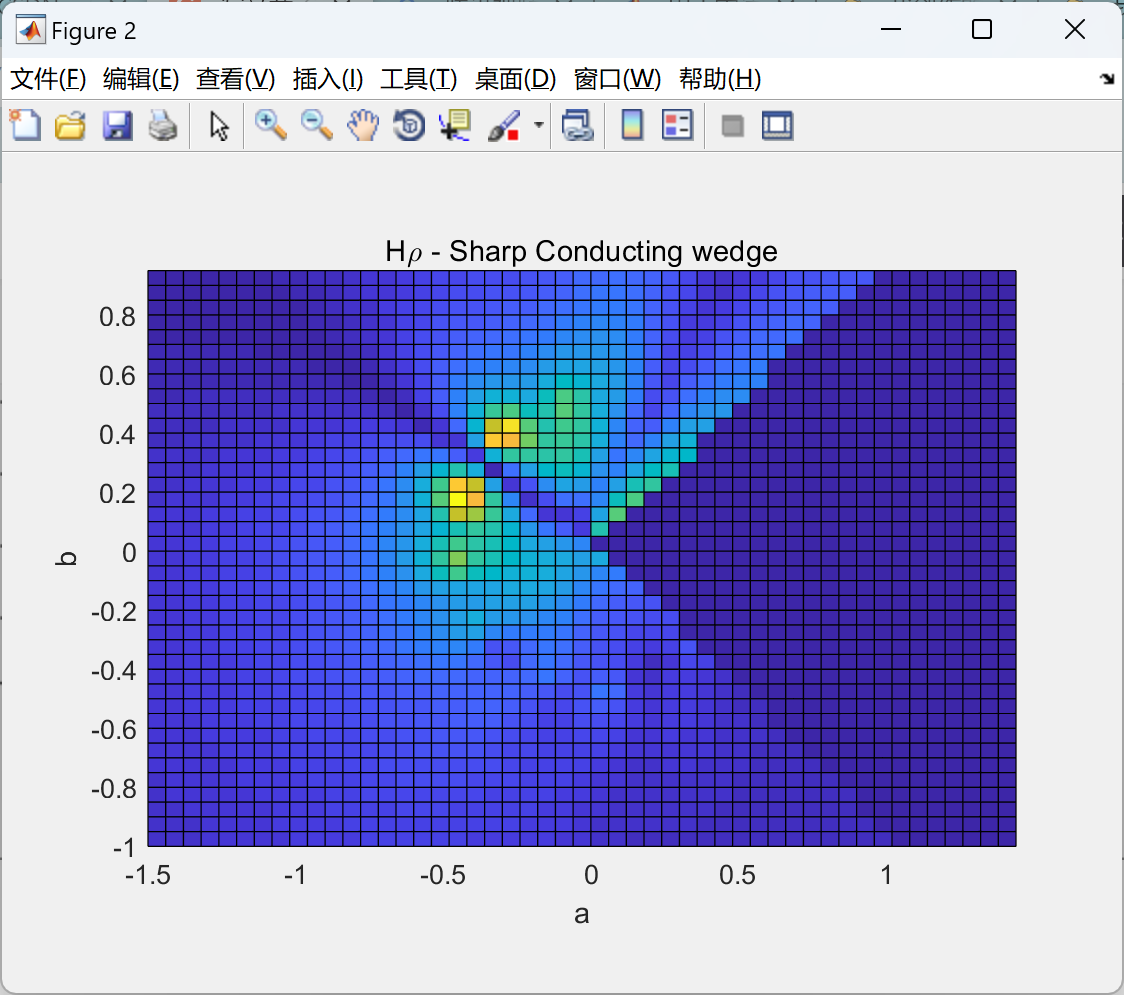
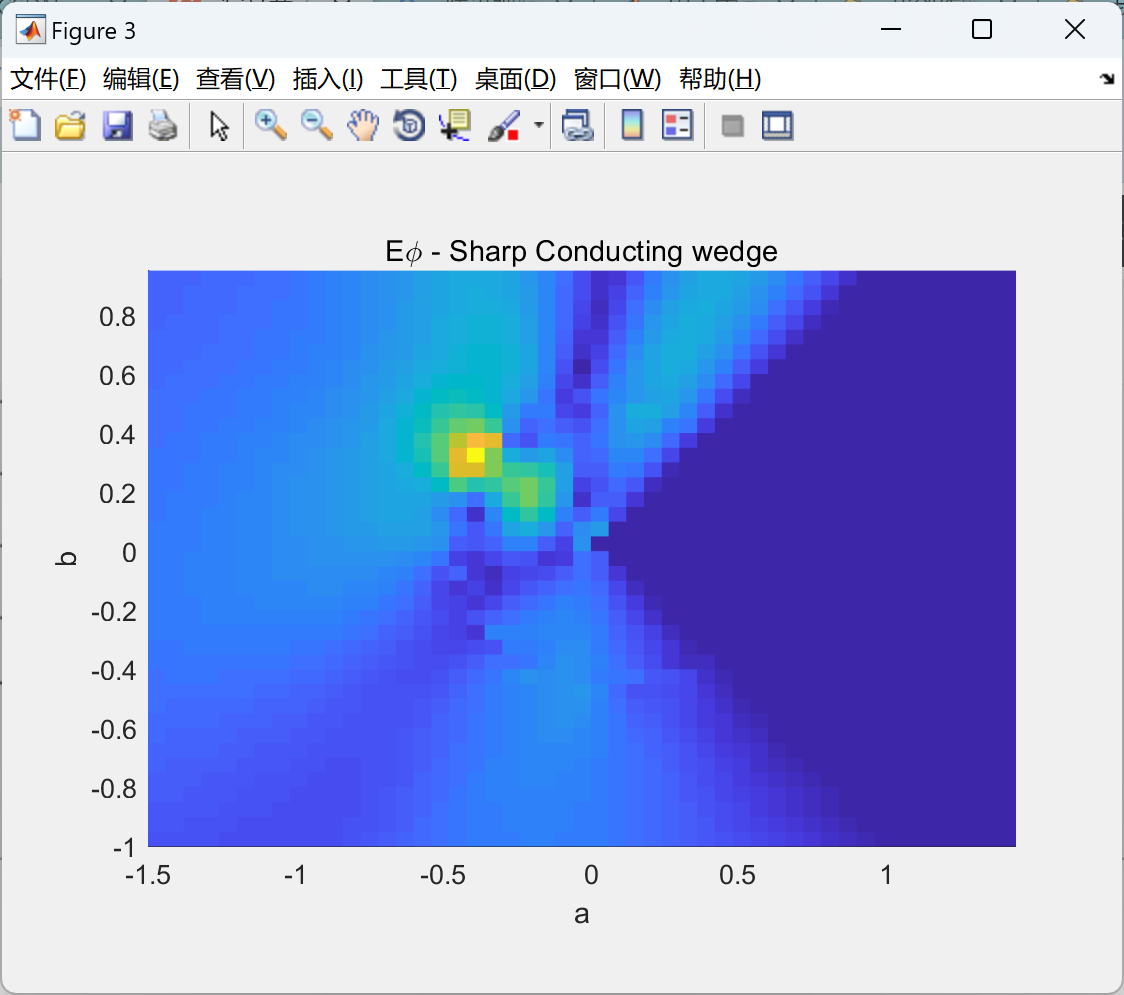
本文用于计算和绘制雷达设计和分析问题。这个集合涵盖了广泛的主题,包括雷达方程、雷达波形分析、脉冲压缩、匹配滤波器、拉伸处理、高距离分辨率(HRR)、相控阵、卡尔曼滤波器、运动目标指示(MTI)、杂波分析、Swerling模型、Pd计算、PRN和Barker码、合成孔径雷达(SAR)等。这些资源为雷达工程师提供了广泛的支持,帮助他们解决雷达系统设计和分析的各个方面的问题。除了上述内容,该集合还可能涵盖雷达系统的实时信号处理、自适应波束形成、多普勒处理、目标识别技术、雷达系统性能评估等领域,为雷达工程师提供全面的指导和工具,以应对复杂的雷达设计和分析挑战。
📚2 运行结果




部分代码:
% Program to calculate the near field of conducting Sharp wedge
% By: Dr. Atef Elsherbeni -- atef@olemiss.edu -- December 2002
%
% This program uses the function wedgeTMfields.m
clear all
close all
img = sqrt(-1);
rtd = 180/pi; dtr = pi/180;
mu0 = 4*pi*1e-7; % Permeability of free space
eps0 = 8.854e-12; % Permittivity of free space
% Input parameters
rhop = 0.5; % radial Position of the line source
phip = 145*dtr; % angular position of the line source
alpha = 45*dtr; % half Wedge angle
freq = 2.998e8; % frequency
mur = 1; epsr = 3;
ax = 3*rhop; by = 2*rhop; % area for near field calculations
nx = 50; ny = 40; % Number of points for near field calculations
% End of input parameters
etar = sqrt(mur/epsr);
mu = mu0*mur;
eps = eps0*epsr;
lambda = 2.99e8/freq;
k0 = 2*pi/lambda; % free space wavenumber
k = k0*sqrt(mur*epsr); % wavenumber inside dielectric
Nc =round(1+2*k*rhop); % number of terms for series summation
omega =2*pi*freq;
a = -(pi*omega*mu0*mur)/(2*(pi-alpha)); % equation 11-188 Balanis book
% <<< Far field Calculations of Ez component >>>
% Line source excitation
krhop = k*rhop;
for ip = 1:360
phii = (ip -1)*dtr;
xphi(ip) = ip-1;
if phii > alpha & phii < 2*pi-alpha % outside the wedge region
EzFLs(ip) = 0;
for m = 1:Nc
v = (m*pi)/(2*(pi-alpha)); % Equation 11-183a, Balanis book
ssterm = sin(v*(phip-alpha))*sin(v*(phii-alpha));
EzLS(m) = (img^v)*besselj(v,krhop)*ssterm;
end
EzFLs(ip) = abs(sum(EzLS));
else
EzFLs(ip)=0;
end
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]陈友,郭金融,刘延杰等.融合相机和激光雷达的小天体运动状态估计方法[J/OL].深空探测学报(中英文):1-8[2024-02-18].https://doi.org/10.15982/j.issn.2096-9287.2024.20230039.
[2]吴鑫炜,胡明华,毛继志等.分布式综合化飞机环境监视系统架构设计与分析[J/OL].电讯技术:1-8[2024-02-18].https://doi.org/10.20079/j.issn.1001-893x.231123002.
[3]马江辉,裴泽超,胡勇华. 一名雷达老兵的“战位观”[N]. 解放军报,2024-02-08(005).















 5281
5281











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









