






我手里的数据偏移角度是已知的,按理说可以直接用刚性变换矩阵转变后合并。但我自己尝试之后发现,要么背景平面会重建成“千层饼”要么背景是平面,而前面物体出现“多层平移”如下所示:
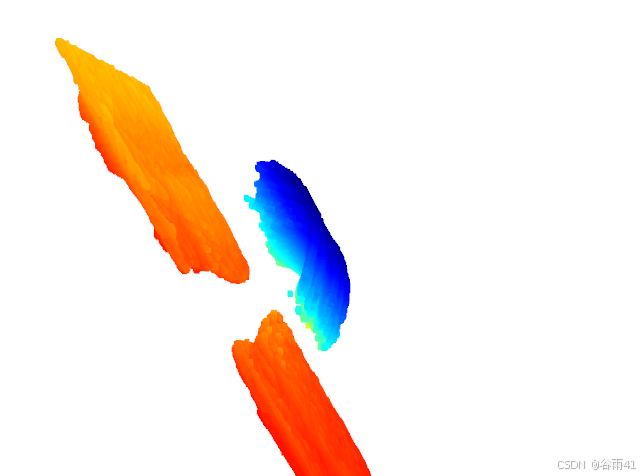
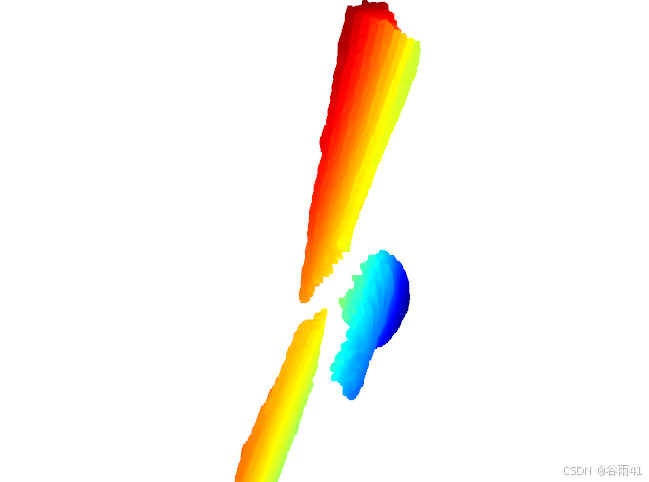
千层饼问题通过调整旋转矩阵解决了,但是物体的重影我不知道怎么解决,看起来可以调整平移矩阵,但我肉眼看的话难免不精确。因此我决定直接放弃已知的角度信息,通过点云配准找到旋转矩阵R和平移矩阵T,以下为详细过程:
这篇博客中介绍了粗配准和精配准两种方法,因为我的点云本来距离已经很相近了,所以我决定直接使用精配准,即迭代最近点算法(ICP算法)
原理大家自行搜索,我这里只写代码过程:
1. 加载目标点云数据:
用 load_point_cloud 函数从文件加载目标点云数据。
def load_point_cloud(file_path):
"""加载点云数据"""
points = np.loadtxt(file_path).T
return points2. 定义最近邻计算
调用scipy中的KDTree
def nearest_neighbor(src, dst):
"""Find the nearest (minimum distance) neighbors"""
tree = KDTree(dst.T)
distances, indices = tree.query(src.T)
return distances, indices3.定义icp函数:
icp 函数接收四个参数:
src: 源点云数据。dst: 目标点云数据。init_pose(可选): 源点云相对于目标点云的初始姿态,默认为None,表示使用单位矩阵作为初始姿态。max_iterations(可选): 最大迭代次数,默认为50次。tolerance(可选): 收敛条件的容差值,默认为0.001。
1. T:未传入初始姿态时初始化一个4x4的单位矩阵作为变换矩阵
2. prev_error:用于存储前一次迭代的均方误差
3. apply_transformation(src, T) :使用当前的变换矩阵T变换源点云
4. 寻找变换后的源点云 src_transformed 和目标点云 dst 之间的最近邻点,返回距离 distances 和索引 indices
5.计算变换后的源点云和目标点云之间的协方差矩阵 cov,使用奇异值分解(SVD)计算最优旋转矩阵 R,将旋转矩阵 R 赋值给 T 的前3x3部分,将平移向量 t 赋值给 T 的前3行第4列。
def icp(src, dst, init_pose=None, max_iterations=50, tolerance=0.001):
"""
The Iterative Closest Point algorithm.
Args:
src: Source point cloud.
dst: Destination point cloud.
init_pose: Initial pose of the source point cloud relative to the destination point cloud.
max_iterations: Maximum number of iterations.
tolerance: Tolerance value to terminate the algorithm.
Returns:
final_transformation: Final transformation matrix from source to destination.
mean_error: Mean square error after convergence.
"""
# Initialize the transformation matrix
if init_pose is None:
T = np.identity(4)
else:
T = init_pose
prev_error = 0
for _ in range(max_iterations):
# Transform the source point cloud using the current transformation
src_transformed = apply_transformation(src, T)
# Find the nearest neighbors between the transformed source and the destination point cloud
distances, indices = nearest_neighbor(src_transformed, dst)
# Compute the mean square error
mean_error = np.mean(distances)
# Check if the error has converged
if abs(prev_error - mean_error) < tolerance:
break
prev_error = mean_error
# Compute the centroid of the source and destination point clouds
centroid_src = np.mean(src_transformed, axis=1)
centroid_dst = np.mean(dst[:, indices], axis=1)
# Center the point clouds
src_centered = src_transformed - centroid_src[:, np.newaxis]
dst_centered = dst[:, indices] - centroid_dst[:, np.newaxis]
# Compute the covariance matrix
cov = src_centered @ dst_centered.T
# Compute the optimal rotation matrix
U, S, Vt = np.linalg.svd(cov)
R = Vt.T @ U.T
# Ensure that the rotation matrix is proper
if np.linalg.det(R) < 0:
Vt[2, :] *= -1
R = Vt.T @ U.T
# Compute the optimal translation vector
t = centroid_dst - R @ centroid_src
# Construct the transformation matrix
T[:3, :3] = R
T[:3, 3] = t
return T, mean_error4. 对原点云做刚性变换使其坐标系与目标点云一致
def apply_transformation(points, transformation_matrix):
"""Apply a transformation matrix to the points"""
hom_points = np.vstack((points, np.ones((1, points.shape[1]))))
transformed_hom_points = transformation_matrix @ hom_points
transformed_points = transformed_hom_points[:3, :] / transformed_hom_points[3, :]
return transformed_points5.把各个角度变换后的点云数据和目标点云数据合并
实现最终目的
if __name__ == "__main__":
# 源点云所在的目录
src_dir = r'G:\pointclouds\alldata'
filenames = [f'point_cloud_{i}.xyz' for i in range(67, 89, 2) if i != 77]
src_files = [os.path.join(src_dir, name) for name in filenames]
# 目标点云文件路径
dst_file = r'G:\pointclouds\alldata\point_cloud_77.xyz'
# 加载目标点云数据
dst = load_point_cloud(dst_file)
# 存储所有变换矩阵
transformations = []
transformed_points_list = []
# 对每个源点云进行配准
for src_file in src_files:
# 加载源点云数据
src = load_point_cloud(src_file)
# 使用ICP算法来配准源点云和目标点云
final_transformation, error = icp(src, dst)
# 输出变换矩阵和均方误差
print(f"Transformation Matrix for {src_file}:")
print(final_transformation)
print(f"Mean Square Error: {error}\n")
# 存储变换矩阵
transformations.append(final_transformation)
# 将源点云变换到目标点云的空间内
transformed_points = apply_transformation(src, final_transformation)
transformed_points_list.append(transformed_points)
# 合并所有变换后的点云
merged_points = np.hstack(transformed_points_list)
# 保存合并后的点云数据
output_file = r'G:\YJY\test\test1\deep-rs-Master\base_dir\dataset_root\PUNnet\pointclouds\merged_point_cloud_1_4.xyz'
np.savetxt(output_file, merged_points.T, fmt='%.6f')
















 2672
2672

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









