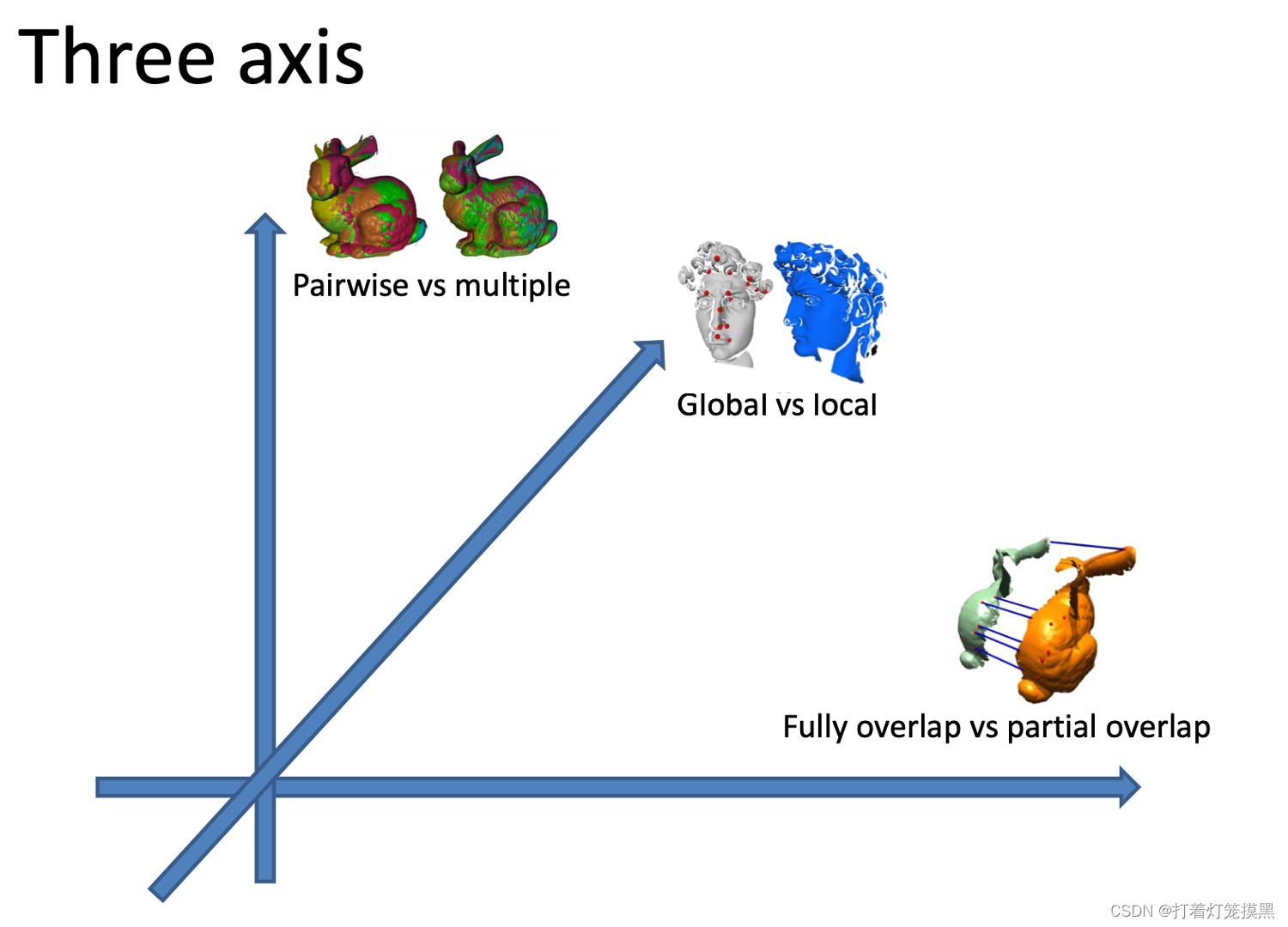
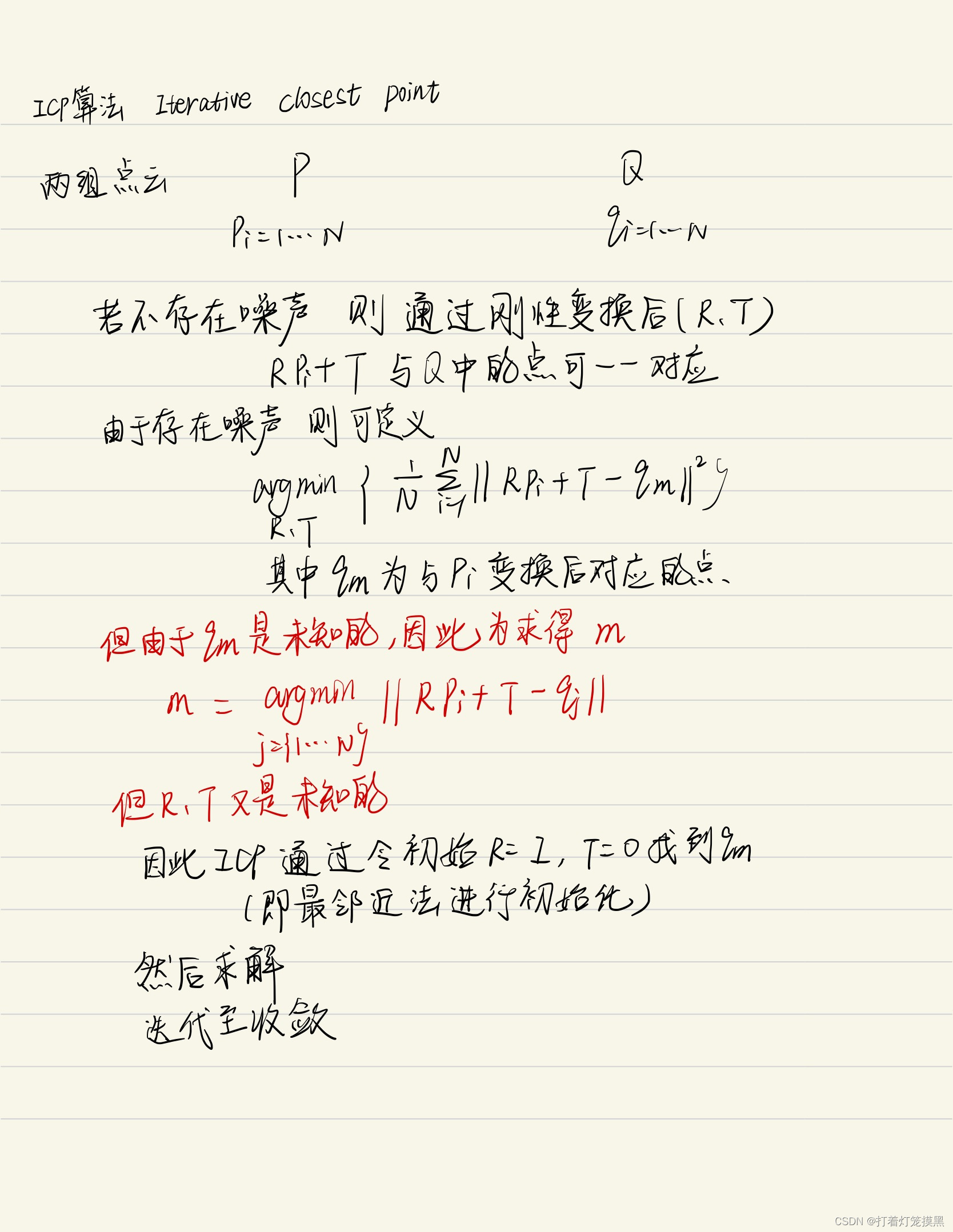
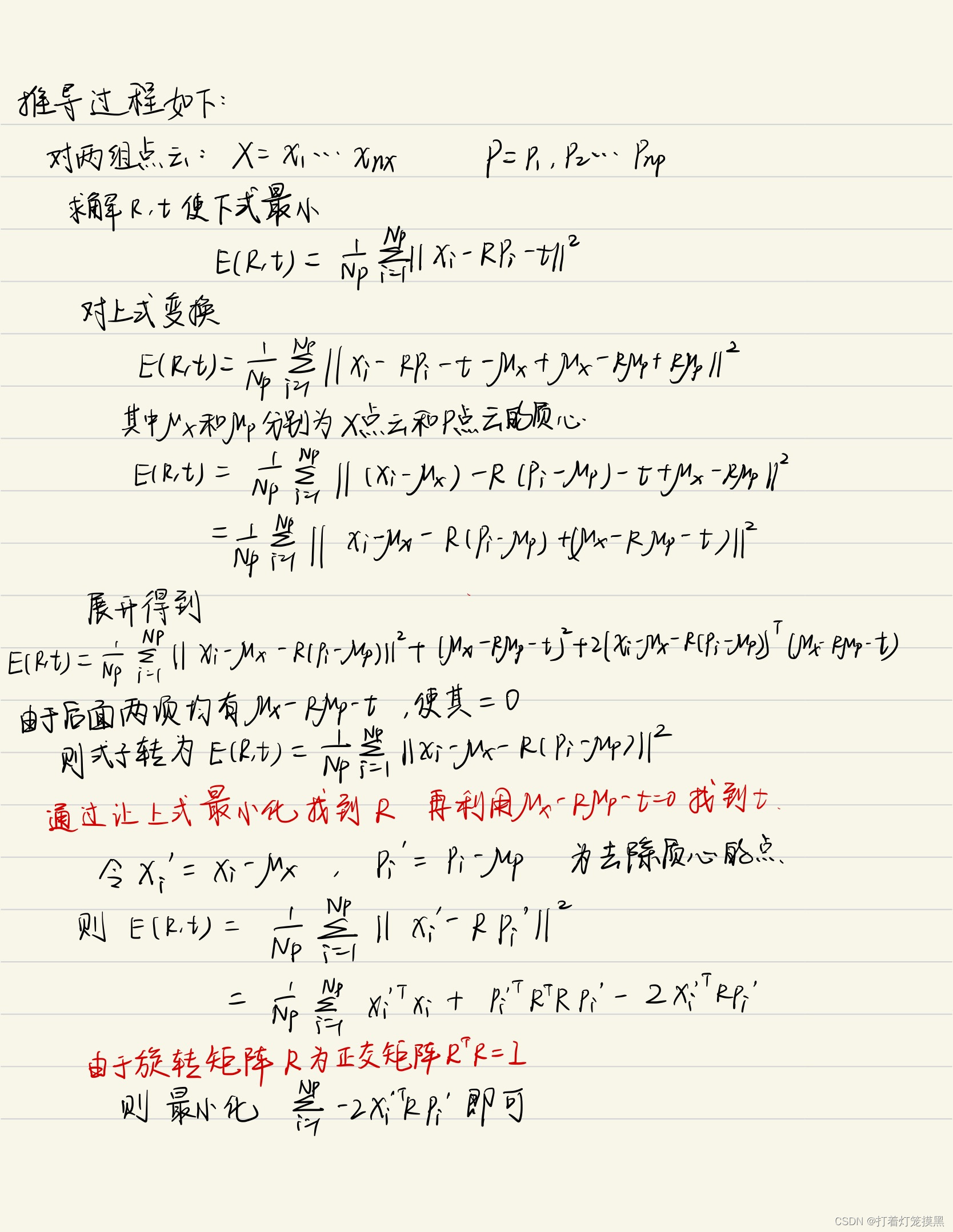
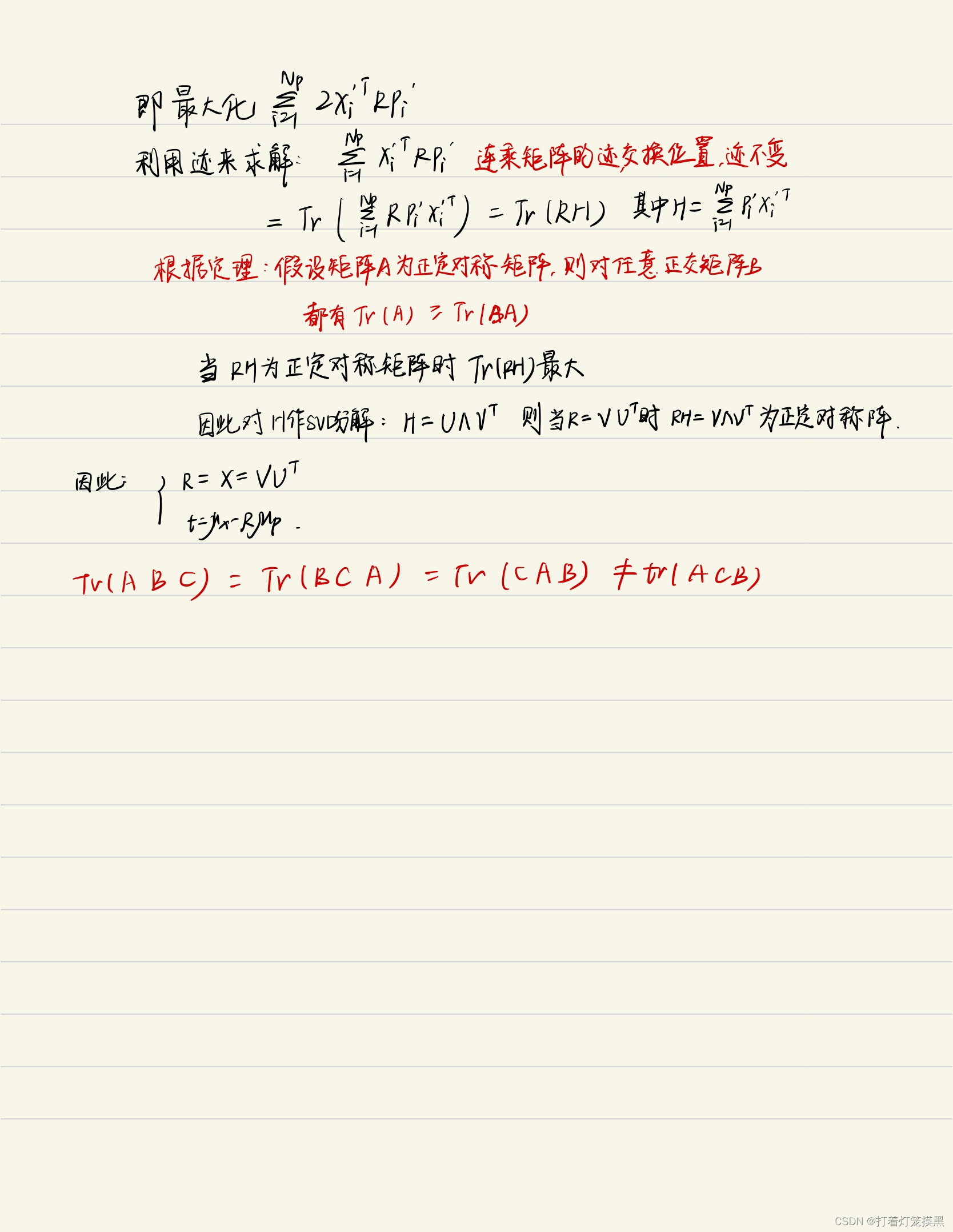
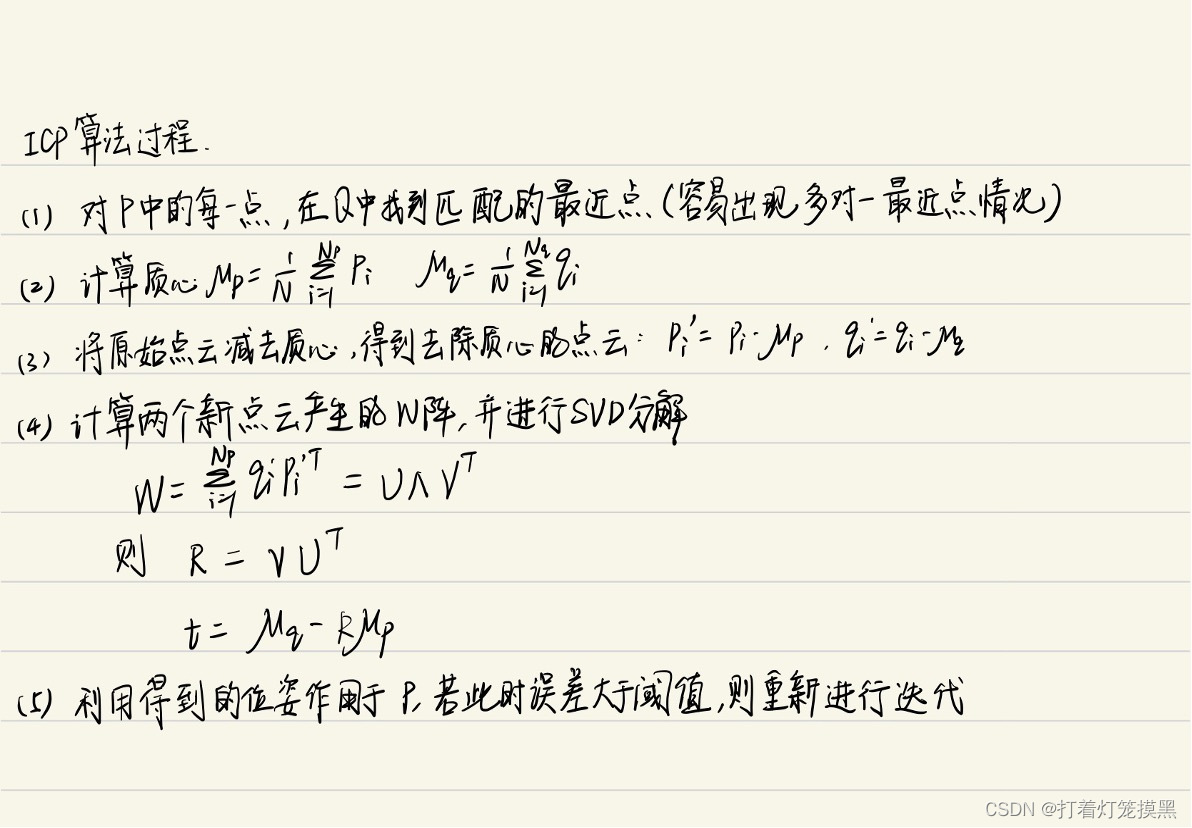
配准问题的分类 完全重叠和部分重叠:完全重叠是两个配准的数据都是物体的完整表示,一般用于工业上仿制品与原件的对比,评估仿制精度。部分重叠更加常见,对一个物体多个角度进行扫描后进行三维重建,各个角度之间只有部分重叠。 全局配准与局部配准:局部配准用于两个配准数据的初始位姿差距不大,例如一段视频中对于同一物体在连续两帧下的配准。全局配准用于位姿任意的情况,例如相机移动较大距离后与移动前的配准。 成对配准与多对配准:成对就是配准两片点云,多对就是同时配准多片点云,显然在三维重建中需要同时配准多片点云。 ICP算法配准成对点云






















 819
819











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






