






1. 自定义二维卷积算子
import torch
import torch.nn as nn
class Conv2D(nn.Module):
def __init__(self, kernel_size, stride=1, padding=0, weight_value=[[0., 1.], [2., 3.]]):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.tensor(weight_value, dtype=torch.float32), requires_grad=True)
# 步长
self.stride = stride
# 零填充
self.padding = padding
def forward(self,X):
"""
输入:
- X:输入矩阵,shape=[B, M, N],B为样本数量
输出:
- output:输出矩阵
"""
u,v=self.weight.shape
output=torch.zeros(X.shape[0],X.shape[1]-u+1,X.shape[2]-v+1)
for i in range(output.shape[1]):
for j in range(output.shape[2]):
output[:,i,j]=torch.sum(X[:,i:i+u,j:j+v]*self.weight,dim=[1,2])
return output
torch.manual_seed(100)
inputs=torch.tensor([[[1.,2.,3.,],[4.,5.,6.,],[7.,8.,9.,]]])
conv2d=Conv2D(kernel_size=2)
outputs=conv2d(inputs)
print("input :{},\noutput :{}".format(inputs,outputs))
输出结果:
2. 自定义带步长和零填充的二维卷积算子
import torch
import torch.nn as nn
# 带步长和零填充的二维卷积算子
class Conv2D(nn.Module):
def __init__(self, kernel_size, stride=1, padding=0, weight_value=1.0):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.full((kernel_size, kernel_size), fill_value=weight_value, dtype=torch.float32), requires_grad=True)
# 步长
self.stride = stride
# 零填充
self.padding = padding
def forward(self,X):
# 零填充
new_X=torch.zeros([X.shape[0],X.shape[1]+2*self.padding,X.shape[2]+2*self.padding])
new_X[:,self.padding:X.shape[1]+self.padding,self.padding:X.shape[2]+self.padding]=X
u,v=self.weight.shape
output_w=(new_X.shape[1]-u)//self.stride+1
output_h=(new_X.shape[2]-v)//self.stride+1
output=torch.zeros([X.shape[0],output_w,output_h])
for i in range(0,output.shape[1]):
for j in range(0,output.shape[2]):
output[:,i,j]=torch.sum(new_X[:,self.stride*i:self.stride*i+u,self.stride*j:self.stride*j+v],dim=[1,2])
return output
inputs=torch.randn(size=[2,8,8])
conv2d_padding=Conv2D(kernel_size=3,padding=1)
outputs=conv2d_padding(inputs)
print("When kernel_size=3, padding=1 stride=1, input's shape: {}, output's shape: {}".format(inputs.shape, outputs.shape))
conv2d_stride = Conv2D(kernel_size=3, stride=2, padding=1)
outputs = conv2d_stride(inputs)
print("When kernel_size=3, padding=1 stride=2, input's shape: {}, output's shape: {}".format(inputs.shape, outputs.shape))
输出结果:

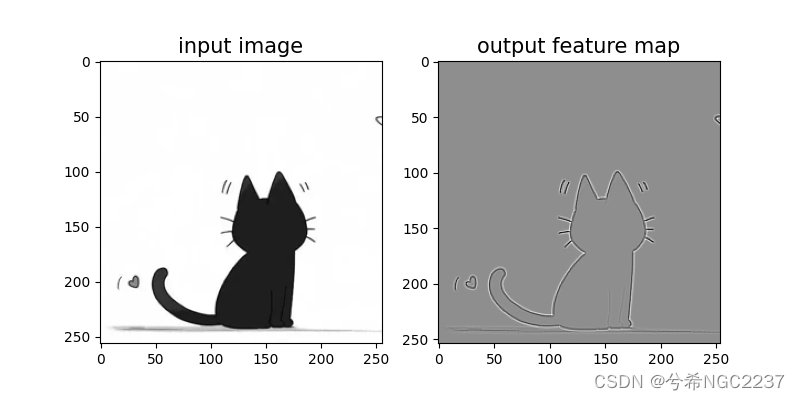
3. 实现图像边缘检测
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
from PIL import Image
import numpy as np
class Conv2D(nn.Module):
def __init__(self, stride=1, padding=0, weight_value=np.array([[-1, -1, -1], [-1, 8, -1], [-1, -1, -1]], dtype='float32').reshape((3,3))):
super(Conv2D, self).__init__()
self.weight = nn.Parameter(torch.tensor(weight_value, dtype=torch.float32), requires_grad=True)
# 步长
self.stride = stride
# 零填充
self.padding = padding
def forward(self, X):
# 零填充
new_X = torch.zeros([X.shape[0], X.shape[1] + 2 * self.padding, X.shape[2] + 2 * self.padding])
new_X[:, self.padding:X.shape[1] + self.padding, self.padding:X.shape[2] + self.padding] = X
u, v = self.weight.shape
output_w = (new_X.shape[1] - u) // self.stride + 1
output_h = (new_X.shape[2] - v) // self.stride + 1
output = torch.zeros([X.shape[0], output_w, output_h])
for i in range(0, output.shape[1]):
for j in range(0, output.shape[2]):
output[:, i, j] = torch.sum(
new_X[:, self.stride * i:self.stride * i + u, self.stride * j:self.stride * j + v]*self.weight, dim=[1, 2])
return output
# 使用卷积运算完成图像边缘检测任务
# 读取图片
img = Image.open('cat.jpg').resize((256,256)).convert('L')
img = np.array(img, dtype='float32')
img = torch.from_numpy(img.reshape((img.shape[0],img.shape[1])))
# 创建卷积算子,卷积核大小为3x3,并使用上面的设置好的数值作为卷积核权重的初始化参数
conv=Conv2D(stride=1,padding=0)
# 将读入的图片转化为float32类型的numpy.ndarray
inputs = np.array(img).astype('float32')
print("bf to_tensor, inputs:",inputs,inputs.shape)
# 将图片转为Tensor
inputs = torch.tensor(inputs)
print("bf unsqueeze, inputs:",inputs,inputs.shape)
inputs = torch.unsqueeze(inputs, dim=0)
print("af unsqueeze, inputs:",inputs,inputs.shape)
outputs = conv(inputs)
# 可视化结果
plt.figure(figsize=(8, 4))
f = plt.subplot(121)
f.set_title('input image', fontsize=15)
plt.imshow(img,cmap='gray')
f = plt.subplot(122)
f.set_title('output feature map', fontsize=15)
plt.imshow(outputs.squeeze().detach().numpy(), cmap='gray')
plt.savefig('conv-vis.pdf')
plt.show()输出结果:
4. 自定义卷积层算子并调用torch函数验证
import torch
import torch.nn as nn
class Conv2D(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0,
weight_attr=None, bias_attr=None):
super(Conv2D, self).__init__()
if weight_attr is None:
weight_attr = nn.init.constant_(torch.empty(out_channels, in_channels, kernel_size, kernel_size), 1.0)
if bias_attr is None:
bias_attr = nn.init.constant_(torch.empty(out_channels), 0.0)
# 创建卷积核
self.weight = nn.Parameter(weight_attr)
# 创建偏置
self.bias = nn.Parameter(bias_attr)
self.stride = stride
self.padding = padding
# 输入通道数
self.in_channels = in_channels
# 输出通道数
self.out_channels = out_channels
# 基础卷积运算
def single_forward(self, X, weight):
# 零填充
new_X = torch.zeros([X.shape[0], X.shape[1]+2*self.padding, X.shape[2]+2*self.padding])
new_X[:, self.padding:X.shape[1]+self.padding, self.padding:X.shape[2]+self.padding] = X
u, v = weight.shape
output_w = (new_X.shape[1] - u) // self.stride + 1
output_h = (new_X.shape[2] - v) // self.stride + 1
output = torch.zeros([X.shape[0], output_w, output_h])
for i in range(0, output.shape[1]):
for j in range(0, output.shape[2]):
output[:, i, j] = torch.sum(
new_X[:, self.stride*i:self.stride*i+u, self.stride*j:self.stride*j+v]*weight,
dim=[1,2])
return output
def forward(self, inputs):
"""
输入:
- inputs:输入矩阵,shape=[B, D, M, N]
- weights:P组二维卷积核,shape=[P, D, U, V]
- bias:P个偏置,shape=[P, 1]
"""
feature_maps = []
# 进行多次多输入通道卷积运算
p=0
for w, b in zip(self.weight, self.bias): # P个(w,b),每次计算一个特征图Zp
multi_outs = []
# 循环计算每个输入特征图对应的卷积结果
for i in range(self.in_channels):
single = self.single_forward(inputs[:,i,:,:], w[i])
multi_outs.append(single)
# print("Conv2D in_channels:",self.in_channels,"i:",i,"single:",single.shape)
# 将所有卷积结果相加
feature_map = torch.sum(torch.stack(multi_outs), dim=0) + b #Zp
feature_maps.append(feature_map)
# print("Conv2D out_channels:",self.out_channels, "p:",p,"feature_map:",feature_map.shape)
p+=1
# 将所有Zp进行堆叠
out = torch.stack(feature_maps, 1)
return out
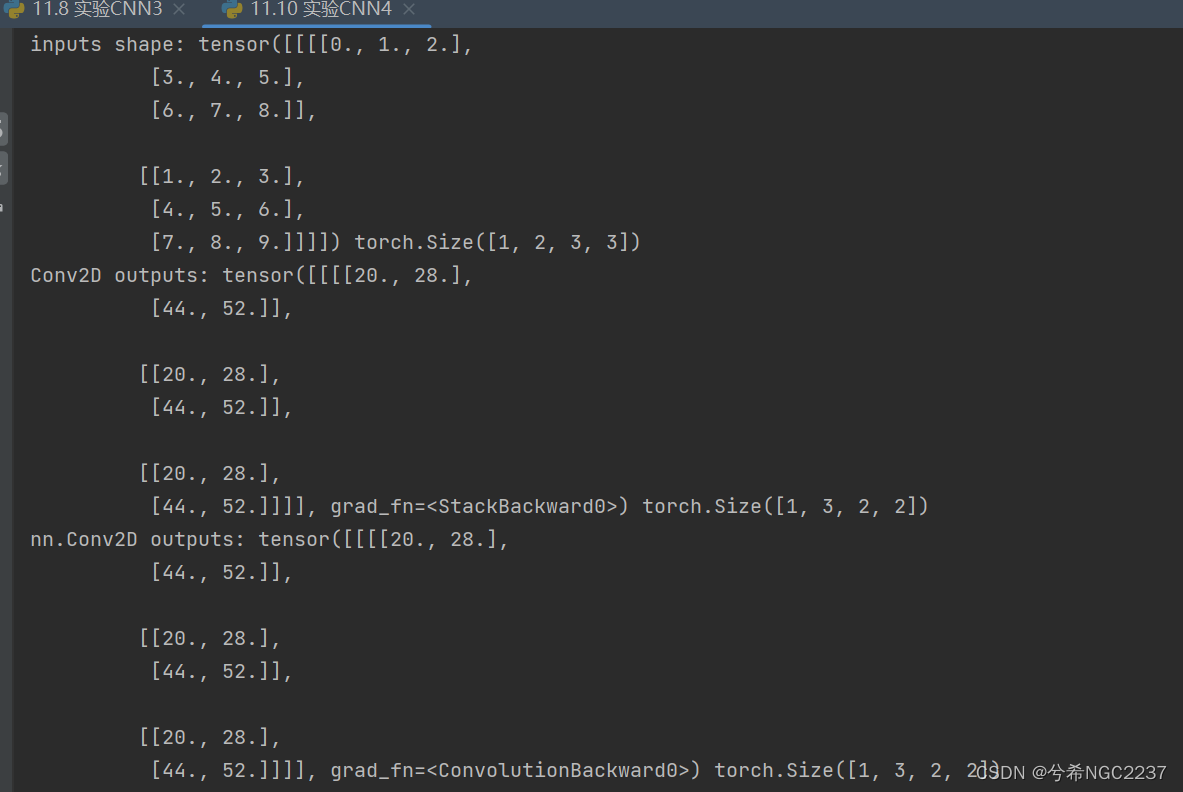
inputs = torch.tensor([[[[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]],
[[1.0, 2.0, 3.0], [4.0, 5.0, 6.0], [7.0, 8.0, 9.0]]]])
conv2d = Conv2D(in_channels=2, out_channels=3, kernel_size=2)
print("inputs shape:",inputs,inputs.shape)
outputs = conv2d(inputs)
# 比较与torch API运算结果
import torch.nn.init as init
conv2d_torch = nn.Conv2d(in_channels=2, out_channels=3, kernel_size=2)
# Initialize the weights and biases
init.constant_(conv2d_torch.weight, 1.0)
init.constant_(conv2d_torch.bias, 0.0)
outputs_torch = conv2d_torch(inputs)
# 自定义算子运算结果
print('Conv2D outputs:', outputs,outputs.shape)
# paddle API运算结果
print('nn.Conv2D outputs:', outputs_torch,outputs_torch.shape)
print('-------------------------------------------------------------')输出结果:
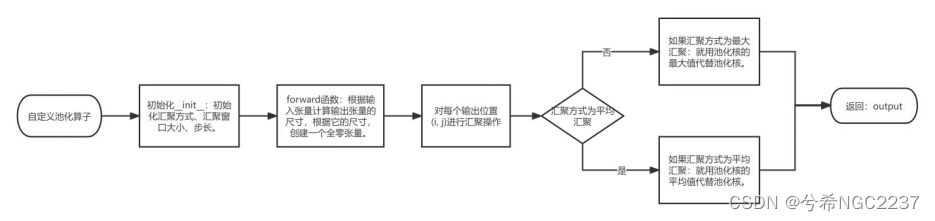
5. 自定义汇聚层算子并调用torch函数验证
class Pool2D(nn.Module):
def __init__(self, size=(2, 2), mode='max', stride=1):
super(Pool2D, self).__init__()
# 汇聚方式
self.mode = mode
self.h, self.w = size
self.stride = stride
def forward(self, x):
output_w = (x.shape[2] - self.w) // self.stride + 1
output_h = (x.shape[3] - self.h) // self.stride + 1
output = torch.zeros([x.shape[0], x.shape[1], output_w, output_h])
# 汇聚
for i in range(output.shape[2]):
for j in range(output.shape[3]):
# 最大汇聚
if self.mode == 'max':
output[:, :, i, j] = torch.max(
x[:, :, self.stride * i:self.stride * i + self.w,
self.stride * j:self.stride * j + self.h].reshape(x.size(0), x.size(1), -1),
dim=2
).values.reshape(x.size(0), x.size(1), 1, 1)
# 平均汇聚
elif self.mode == 'avg':
output[:, :, i, j] = torch.mean(
x[:, :, self.stride * i:self.stride * i + self.w, self.stride * j:self.stride * j + self.h],
dim=[2, 3])
return output
inputs = torch.tensor([[[[1., 2., 3., 4.], [5., 6., 7., 8.], [9., 10., 11., 12.], [13., 14., 15., 16.]]]])
pool2d = Pool2D(stride=2)
outputs = pool2d(inputs)
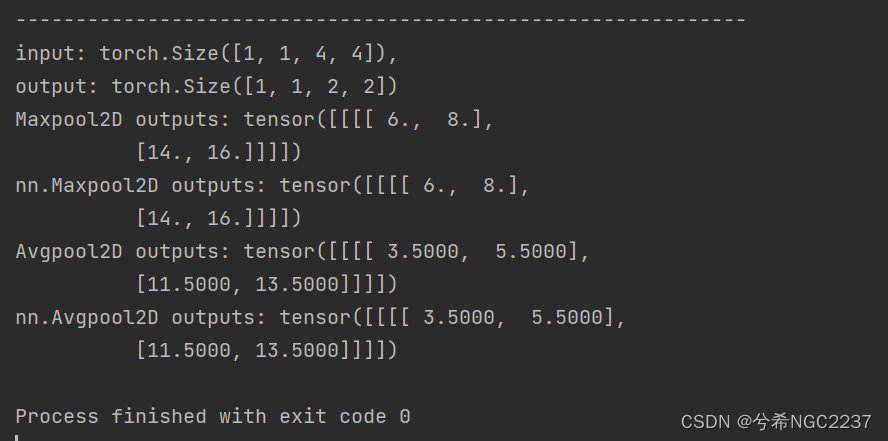
print("input: {}, \noutput: {}".format(inputs.shape, outputs.shape))
# 比较Maxpool2D与torch API运算结果
maxpool2d_torch = nn.MaxPool2d(kernel_size=(2, 2), stride=2)
outputs_paddle = maxpool2d_torch(inputs)
# 自定义算子运算结果
print('Maxpool2D outputs:', outputs)
# paddle API运算结果
print('nn.Maxpool2D outputs:', outputs_paddle)
# 比较Avgpool2D与paddle API运算结果
avgpool2d_paddle = nn.AvgPool2d(kernel_size=(2, 2), stride=2)
outputs_paddle = avgpool2d_paddle(inputs)
pool2d = Pool2D(mode='avg', stride=2)
outputs = pool2d(inputs)
# 自定义算子运算结果
print('Avgpool2D outputs:', outputs)
# paddle API运算结果
print('nn.Avgpool2D outputs:', outputs_paddle)输出结果:
6. 分别用自定义卷积算子和torch.nn.Conv2d()编程实现下面的卷积运算
import torch
import torch.nn as nn
class Conv2D(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size, stride=1, padding=0):
super(Conv2D, self).__init__()
# 创建卷积核
self.weight = torch.nn.Parameter(torch.tensor([[[[-1, 1, 0],
[0, 1, 0],
[0, 1, 1]],
[[-1, -1, 0],
[0, 0, 0],
[0, -1, 0]],
[[0, 0, -1],
[0, 1, 0],
[1, -1, -1]]],
[[[1, 1, -1],
[-1, -1, 1],
[0, -1, 1]],
[[0, 1, 0],
[-1, 0, -1],
[-1, 1, 0]],
[[-1, 0, 0],
[-1, 0, 1],
[-1, 0, 0]]]], dtype=torch.float32))
# 创建偏置
self.bias = torch.nn.Parameter(torch.tensor([[1.],
[0.]]))
self.stride = stride
self.padding = padding
# 输入通道数
self.in_channels = in_channels
# 输出通道数
self.out_channels = out_channels
# 基础卷积运算
def single_forward(self, X, weight):
# 零填充
new_X = torch.zeros([X.shape[0], X.shape[1] + 2 * self.padding, X.shape[2] + 2 * self.padding])
new_X[:, self.padding:X.shape[1] + self.padding, self.padding:X.shape[2] + self.padding] = X
u, v = weight.shape
output_w = (new_X.shape[1] - u) // self.stride + 1
output_h = (new_X.shape[2] - v) // self.stride + 1
output = torch.zeros([X.shape[0], output_w, output_h])
for i in range(0, output.shape[1]):
for j in range(0, output.shape[2]):
output[:, i, j] = torch.sum(
new_X[:, self.stride * i:self.stride * i + u, self.stride * j:self.stride * j + v] * weight,
dim=[1, 2])
return output
def forward(self, inputs):
"""
输入:
- inputs:输入矩阵,shape=[B, D, M, N]
- weights:P组二维卷积核,shape=[P, D, U, V]
- bias:P个偏置,shape=[P, 1]
"""
feature_maps = []
# 进行多次多输入通道卷积运算
p = 0
for w, b in zip(self.weight, self.bias): # P个(w,b),每次计算一个特征图Zp
multi_outs = []
# 循环计算每个输入特征图对应的卷积结果
for i in range(self.in_channels):
single = self.single_forward(inputs[:, i, :, :], w[i])
multi_outs.append(single)
# print("Conv2D in_channels:",self.in_channels,"i:",i,"single:",single.shape)
# 将所有卷积结果相加
feature_map = torch.sum(torch.stack(multi_outs), dim=0) + b # Zp
feature_maps.append(feature_map)
# print("Conv2D out_channels:",self.out_channels, "p:",p,"feature_map:",feature_map.shape)
p += 1
# 将所有Zp进行堆叠
out = torch.stack(feature_maps, 1)
return out
inputs = torch.tensor([[[[0, 1, 1, 0, 2],
[2, 2, 2, 2, 1],
[1, 0, 0, 2, 0],
[0, 1, 1, 0, 0],
[1, 2, 0, 0, 2]],
[[1, 0, 2, 2, 0],
[0, 0, 0, 2, 0],
[1, 2, 1, 2, 1],
[1, 0, 0, 0, 0],
[1, 2, 1, 1, 1]],
[[2, 1, 2, 0, 0],
[1, 0, 0, 1, 0],
[0, 2, 1, 0, 1],
[0, 1, 2, 2, 2],
[2, 1, 0, 0, 1]]]], dtype=torch.float32)
net1 = Conv2D(3, 2, 3, stride=2, padding=1)
outputs1 = net1(inputs)
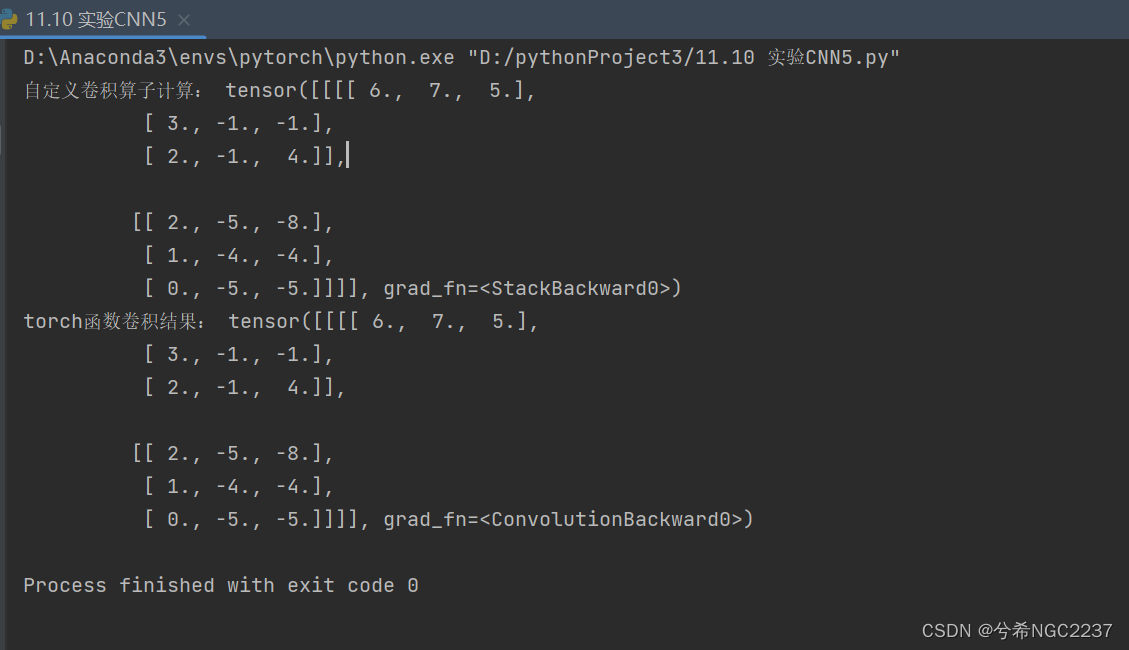
print("自定义卷积算子计算:",outputs1)
# 自定义权重
weight = nn.Parameter(torch.tensor([[[[-1, 1, 0],
[0, 1, 0],
[0, 1, 1]],
[[-1, -1, 0],
[0, 0, 0],
[0, -1, 0]],
[[0, 0, -1],
[0, 1, 0],
[1, -1, -1]]],
[[[1, 1, -1],
[-1, -1, 1],
[0, -1, 1]],
[[0, 1, 0],
[-1, 0, -1],
[-1, 1, 0]],
[[-1, 0, 0],
[-1, 0, 1],
[-1, 0, 0]]]], dtype=torch.float32))
# 创建卷积层
conv2d = nn.Conv2d(in_channels=3, out_channels=2, kernel_size=3, stride=2, padding=1, bias=True)
# 将自定义的权重赋值给卷积层的参数
conv2d.weight = weight
# 分别为两个卷积核设置不同的偏置值
conv2d.bias = nn.Parameter(torch.tensor([1., 0.]))
# 对输入张量进行卷积操作
output = conv2d(inputs)
# 输出张量的形状和值
print("torch函数卷积结果:", output)
输出结果:
总结:
在这次实验中,主要进行了:
自定义二维卷积算子和自定义带步长和零填充的二维卷积算子,然后利用定义的卷计算子实现图像边缘检测:
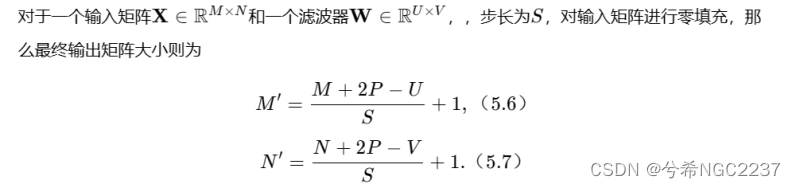
主要就是深入了解函数内部的详细运行方式:这两个的流程都如下,只是输出矩阵的计算方式不同:
- 不带零填充的输出矩阵的计算:
- 带零填充的输出矩阵的计算:
自定义卷积层算子和汇聚层算子
主要是在之前计算的基础上加上,对于每个通道的卷积运算,再堆叠起来。
在该实验中,对于卷积算法的了解层层深入,从只是简单的卷积运算,到带步长和零填充的卷积,再到多通道的卷积运算,并对卷积算法进行应用。

















 1361
1361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









