







1、导入库(这些库几乎包含需要的所有函数文件)
#include "stdio.h"
#include<iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;2、灯条类
class LightDescriptor
{
float width,length,angle,area;
cv::Point2f center;
public:
LightDescriptor() {};
LightDescriptor(const cv::RotatedRect& light)
{
width = light.size.width;
length = light.size.height;
center = light.center;
angle = light.angle;
area = light.size.area();
}
const LightDescriptor& operator =(const LightDescriptor& ld)
{
this->width = ld.width;
this->length = ld.length;
this->center = ld.center;
this->angle = ld.angle;
this->area = ld.area;
return *this;
}
};3、筛选灯条函数
//关键在于筛选灯条这个功能,所以封装成一个函数进行处理,轮廓、
void filterContours(vector<vector<Point> >& contours, vector<LightDescriptor>& lightInfos,Mat frame) {
Mat c = frame.clone();
for (int i = 0; i < contours.size(); i++) {
// 求轮廓面积
double area = contourArea(contours[i]);
// 去除较小轮廓&fitEllipse的限制条件
if (area < 5 || contours[i].size() <= 1)
continue;//相当于就是把这段轮廓去除掉
// 用椭圆拟合区域得到外接矩形(特殊的处理方式:因为灯条是椭圆型的,所以用椭圆去拟合轮廓,再直接获取旋转外接矩形即可)
RotatedRect Light_Rec = fitEllipse(contours[i]);
// 长宽比和轮廓面积比限制(由于要考虑灯条的远近都被识别到,所以只需要看比例即可)
if (Light_Rec.size.width / Light_Rec.size.height > 4)
continue;
// 扩大灯柱的面积(相当于对灯柱做膨胀操作)
Light_Rec.size.height *= 1.2;
Light_Rec.size.width *= 1.2;
/*
Point2f vertices[4];
Light_Rec.points(vertices);
for (int i = 0; i < 4; i++) {
line(frame, vertices[i], vertices[(i + 1) % 4], Scalar(0, 255, 255), 2);
}
namedWindow("video", WINDOW_FREERATIO);
imshow("video", frame);
waitKey(1);*/
lightInfos.push_back(LightDescriptor(Light_Rec));
}
}
4、集中定义变量
int main()
{
VideoCapture video; //VC类对象化
video.open("/home/geek_style/桌面/ood_red.mp4");
Mat frame,channels[3],binary,Gaussian,dilate;
Mat element = getStructuringElement(MORPH_RECT, Size(5, 5));
Rect boundRect;
RotatedRect box;
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
vector<Point2f> boxPts(4);5、预处理、筛选灯条、匹配灯条(核心步骤)
for (;;) {
Rect point_array[20];
video >> frame; //读取每帧
if (frame.empty()) {
break;
}
split(frame, channels); //通道分离
threshold(channels[0], binary, 220, 255, 0);//二值化
GaussianBlur(binary, Gaussian, Size(5, 5), 0);//滤波
dilate(Gaussian, dilate, element, Point(-1, -1));//膨胀,把滤波得到的细灯条变宽
findContours(dilate, contours, hierarchy, RETR_TREE, CHAIN_APPROX_NONE);//轮廓检测
//筛选灯条,其中的lightInfos是返回的被筛选好的灯条
vector<LightDescriptor> lightInfos;
filterContours(contours, lightInfos,frame);
//遍历所有灯条进行匹配(双重循环,在原先的i灯条的基础上去匹配剩下的灯条,即筛选出来)
for (size_t i = 0; i < lightInfos.size(); i++) {
for (size_t j = i + 1; (j < lightInfos.size()); j++) {
LightDescriptor& leftLight = lightInfos[i];
LightDescriptor& rightLight = lightInfos[j];
//角差
float angleDiff_ = abs(leftLight.angle - rightLight.angle);
//长度差比率(由于远近的关系,需要考虑的应该是个差距的比值而不是差距本身)
float LenDiff_ratio = abs(leftLight.length - rightLight.length) / max(leftLight.length, rightLight.length);
//筛选
if (angleDiff_ > 10 || LenDiff_ratio > 0.8) {
continue;
}
//左右灯条相距距离
float dis = pow(pow((leftLight.center.x - rightLight.center.x), 2) + pow((leftLight.center.y - rightLight.center.y), 2), 0.5);
//左右灯条长度的平均值
float meanLen = (leftLight.length + rightLight.length) / 2;
//左右灯条长度差比值
float lendiff = abs(leftLight.length - rightLight.length) / meanLen ;
//左右灯条中心点y的差值
float yDiff = abs(leftLight.center.y - rightLight.center.y);
//y差比率
float yDiff_ratio = yDiff / meanLen;
//左右灯条中心点x的差值
float xDiff = abs(leftLight.center.x - rightLight.center.x);
//x差比率
float xDiff_ratio = xDiff / meanLen;
//相距距离与灯条长度比值
float ratio = dis / meanLen;
//筛选
if (lendiff > 0.5 ||
yDiff_ratio > 1.2 ||
xDiff_ratio > 2 ||
xDiff_ratio < 0.6 ||
ratio > 3.5 ||
ratio < 0.5) {
continue;
}6、绘制矩形框
//绘制矩形
Point center = Point((leftLight.center.x + rightLight.center.x) / 2, (leftLight.center.y + rightLight.center.y)/2);
RotatedRect rect = RotatedRect(center, Size(dis, meanLen), (leftLight.angle + rightLight.angle) / 2);
Point2f vertices[4];
rect.points(vertices);
for (int i = 0; i < 4; i++) {
line(frame, vertices[i], vertices[(i + 1) % 4], Scalar(0, 255, 0), 2);
}
}
}
namedWindow("video", WINDOW_FREERATIO);
imshow("video",frame);
waitKey(30);
}
video.release();
cv::destroyAllWindows();
return 0;
}7、总代码(稍加修改了,减少了部分不大需要的代码)
#include "stdio.h"
#include<iostream>
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace std;
using namespace cv;
//由于在识别中的核心物体以及相关的物理特性是灯条,所以建一个灯条类
class LightDescriptor
{ //在识别以及匹配到灯条的功能中需要用到旋转矩形的长宽偏转角面积中心点坐标等
public:float width, length, angle, area;
cv::Point2f center;
public:
LightDescriptor() {};
//让得到的灯条套上一个旋转矩形,以方便之后对角度这个特殊因素作为匹配标准
LightDescriptor(const cv::RotatedRect& light)
{
width = light.size.width;
length = light.size.height;
center = light.center;
angle = light.angle;
area = light.size.area();
}
};
int main()
{
VideoCapture video; //VC类对象化
video.open("/home/geek_style/桌面/ood_red.mp4");
//变量集中定义
Mat frame, channels[3], binary, Gaussian, dilatee;
Mat element = getStructuringElement(MORPH_RECT, Size(5, 5));
Rect boundRect;
RotatedRect box;
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
vector<Point2f> boxPts(4);
//图像预处理
for (;;) {
Rect point_array[20];
video >> frame; //读取每帧
if (frame.empty()) {
break;
}
split(frame, channels); //通道分离
threshold(channels[0], binary, 220, 255, 0);//二值化
GaussianBlur(binary, Gaussian, Size(5, 5), 0);//滤波
dilate(Gaussian, dilatee, element);
// dilate(Gaussian, dilate, element, Point(-1, -1));//膨胀,把滤波得到的细灯条变宽
findContours(dilatee, contours, hierarchy, RETR_TREE, CHAIN_APPROX_NONE);//轮廓检测
vector<LightDescriptor> lightInfos;//创建一个灯条类的动态数组
//筛选灯条
for (int i = 0; i < contours.size(); i++) {
// 求轮廓面积
double area = contourArea(contours[i]);
// 去除较小轮廓&fitEllipse的限制条件
if (area < 5 || contours[i].size() <= 1)
continue;//相当于就是把这段轮廓去除掉
// 用椭圆拟合区域得到外接矩形(特殊的处理方式:因为灯条是椭圆型的,所以用椭圆去拟合轮廓,再直接获取旋转外接矩形即可)
RotatedRect Light_Rec = fitEllipse(contours[i]);
// 长宽比和轮廓面积比限制(由于要考虑灯条的远近都被识别到,所以只需要看比例即可)
if (Light_Rec.size.width / Light_Rec.size.height > 4)
continue;
lightInfos.push_back(LightDescriptor(Light_Rec));
}
//二重循环多条件匹配灯条
for (size_t i = 0; i < lightInfos.size(); i++) {
for (size_t j = i + 1; (j < lightInfos.size()); j++) {
LightDescriptor& leftLight = lightInfos[i];
LightDescriptor& rightLight = lightInfos[j];
float angleGap_ = abs(leftLight.angle - rightLight.angle);
//由于灯条长度会因为远近而受到影响,所以按照比值去匹配灯条
float LenGap_ratio = abs(leftLight.length - rightLight.length) / max(leftLight.length, rightLight.length);
float dis = pow(pow((leftLight.center.x - rightLight.center.x), 2) + pow((leftLight.center.y - rightLight.center.y), 2), 0.5);
//均长
float meanLen = (leftLight.length + rightLight.length) / 2;
float lengap_ratio = abs(leftLight.length - rightLight.length) / meanLen;
float yGap = abs(leftLight.center.y - rightLight.center.y);
float yGap_ratio = yGap / meanLen;
float xGap = abs(leftLight.center.x - rightLight.center.x);
float xGap_ratio = xGap / meanLen;
float ratio = dis / meanLen;
//匹配不通过的条件
if (angleGap_ > 15 ||
LenGap_ratio > 1.0 ||
lengap_ratio > 0.8 ||
yGap_ratio > 1.5 ||
xGap_ratio > 2.2 ||
xGap_ratio < 0.8 ||
ratio > 3 ||
ratio < 0.8) {
continue;
}
//绘制矩形
Point center = Point((leftLight.center.x + rightLight.center.x) / 2, (leftLight.center.y + rightLight.center.y) / 2);
RotatedRect rect = RotatedRect(center, Size(dis, meanLen), (leftLight.angle + rightLight.angle) / 2);
Point2f vertices[4];
rect.points(vertices);
for (int i = 0; i < 4; i++) {
line(frame, vertices[i], vertices[(i + 1) % 4], Scalar(0, 0, 255), 2.2);
}
}
}
namedWindow("video", WINDOW_FREERATIO);
imshow("video", frame);
waitKey(5);
}
video.release();
cv::destroyAllWindows();
return 0;
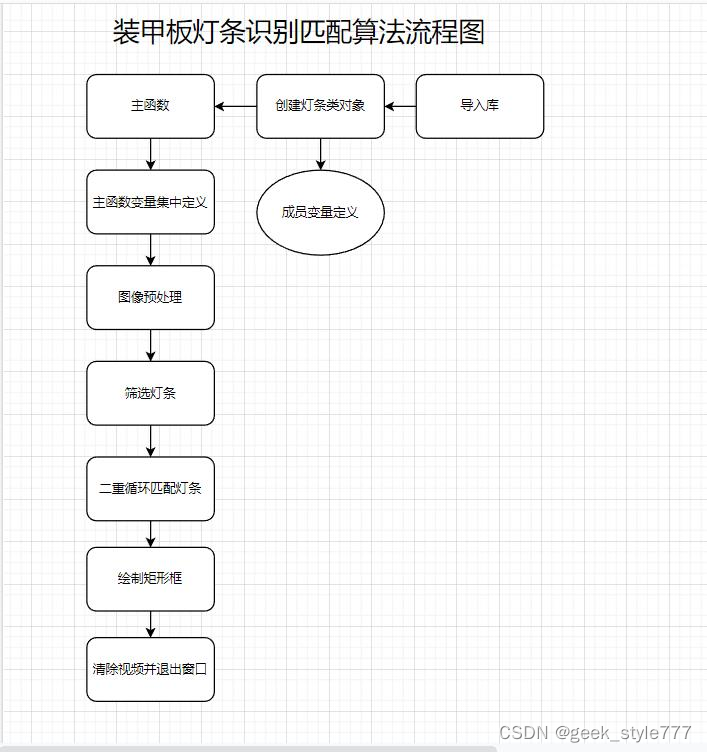
}8、思路流程图
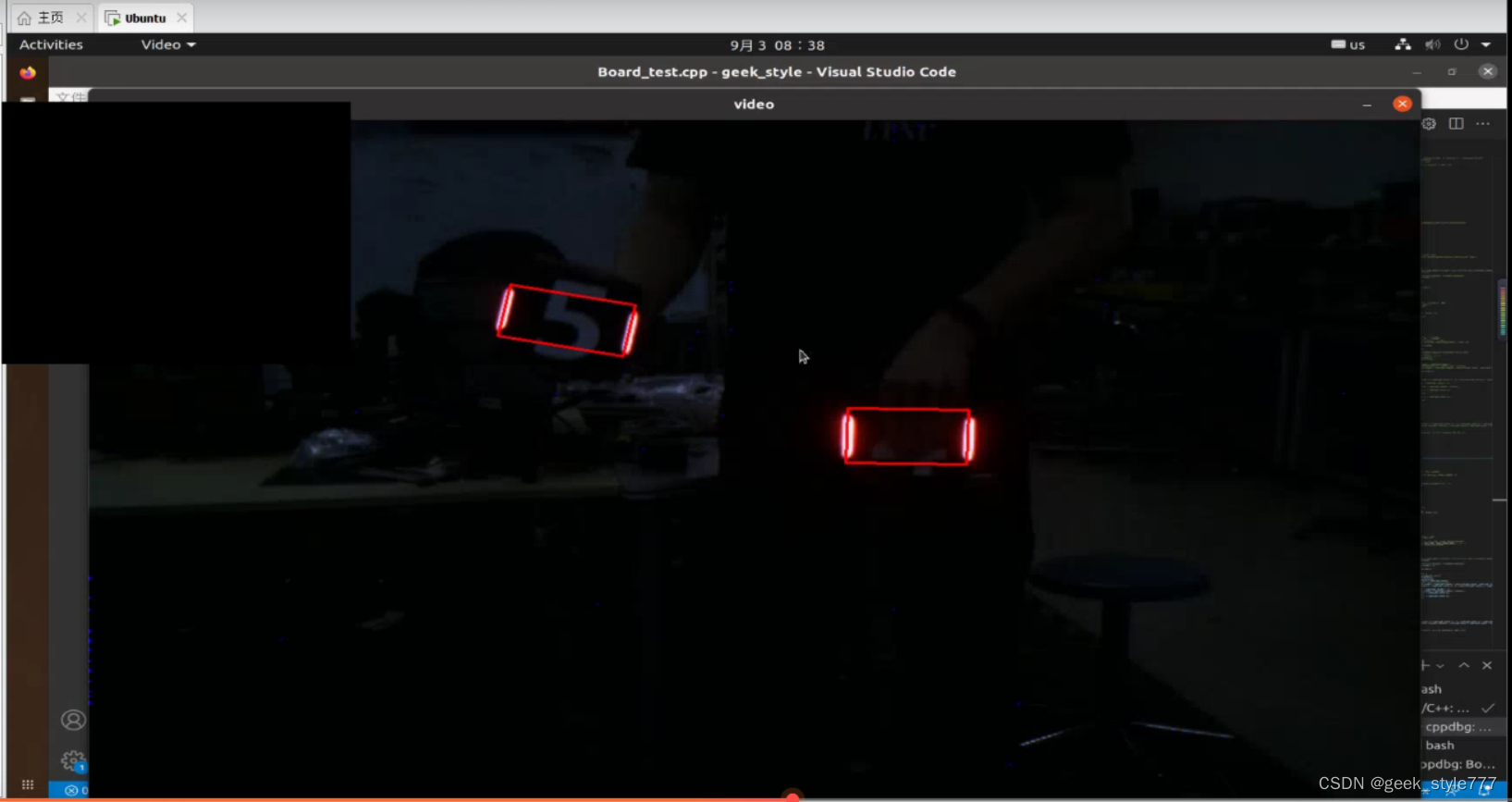
9、实际效果
以后还会持续更新视觉项目学习笔记和项目源码,欢迎大家追更哦:)

















 1089
1089

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









