










托更了一年终于迎来了今天的更新,实在太忙碌了!经历了一年的沉淀,我对于ROS以及机器人系统有了一些新的感悟,今天必须要写下来。
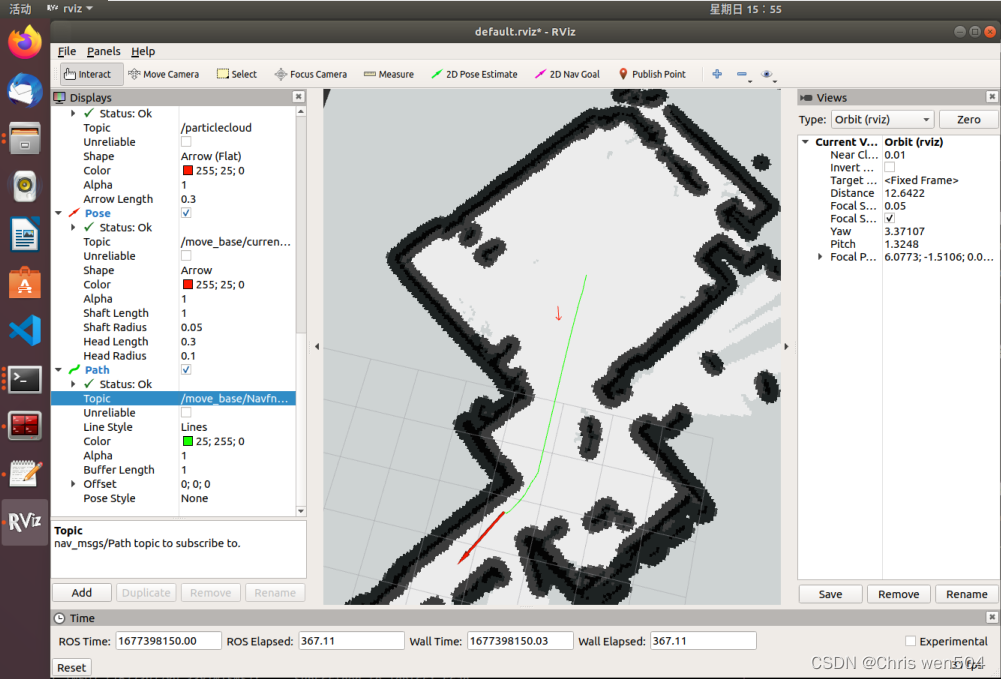
ROS系统上搭载的cartographer以及move_base包。实际上这两个包就足够了(需要自主探索的还需要一个exploration,当然控制策略和算法可以自己编写。通过获取move_base\globalcostmap中的代价地图信息自己规划探索算法并最终在规划出来的探索点设置导航目标点即可),因为move_base中就已经涵盖了全局规划算法、局部路径规划算法、amcl算法。当然还需要一个mapserver用于加载地图。很多小白开始使用自己的雷达或者IMU跑通了cartographer就不知道下步该怎么做了,其实cartographer仅仅是完成了SLAM中的地图构建和即时定位,我们需要让机器人利用这张地图进行自主的运动。这个时候你有两种选择(1)利用cartographer进行定位,使用全局路径规划A*和局部路径规划DWA进行导航,再自己编写一个导航点队列发布的程序使机器人依次运动到设置的目标点。(2)利用cartographer进行建图保存地图后,使用mapserver先将刚刚建好的图加载,随后利用amcl算法进行定位,使用全局路径规划A*和局部路径规划DWA进行导航,再自己编写一个导航点队列发布的程序使机器人依次运动到设置的目标点。
先说说两种方法的利弊吧:
第一种方案的优点就是方便快捷,而且cartographer的定位是较为准确的。
缺点就是1.cartographer受环境的影响较大,因为cartographer的回环检测会误认为存在闭环,很多时候因为硬件的问题导致丢帧,或者出现遮挡激光雷达的情况,这些就会使这张正在构建的地图出现严重的错误。这个时候地图大概率变成一坨翔。即使你再发布导航点,由于地图出现错误相应的全局和局部的代价地图也会更新成依托答辩,因此机器人会受到障碍物的阻碍不能通过。
2.cartographer占用系统资源比较严重,因此速度并不如AMCL算法
第二种方案的优点就是地图可靠,同时主要依赖局部代价地图进行地图的局部更新,这样即使是存在障碍物或者突发的因素也不会改变实现建好的地图的全局代价地图。这样出错的概率就会大大降低,但是这个方案的缺点也很明显动态的障碍物会很大程度的影响AMCL的定位精度。因为AMCL的定位主要是依靠激光雷达的数据。
(继续占坑 后面分享源码和主要的框架)














 1138
1138











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









