







STM32 的定时器除了 TIM6 和 7为普通定时器。其他的高级和通用定时器都可以用来产生 PWM 输出。其中高级定时器 TIM1 和 TIM8 可以同时产生多达 7 路的 PWM 输出。而通用定时器也能同时产生多达 4路的 PWM 输出(每个通道输出一路),这样,STM32 最多可以同时产生 30 路 PWM 输出!
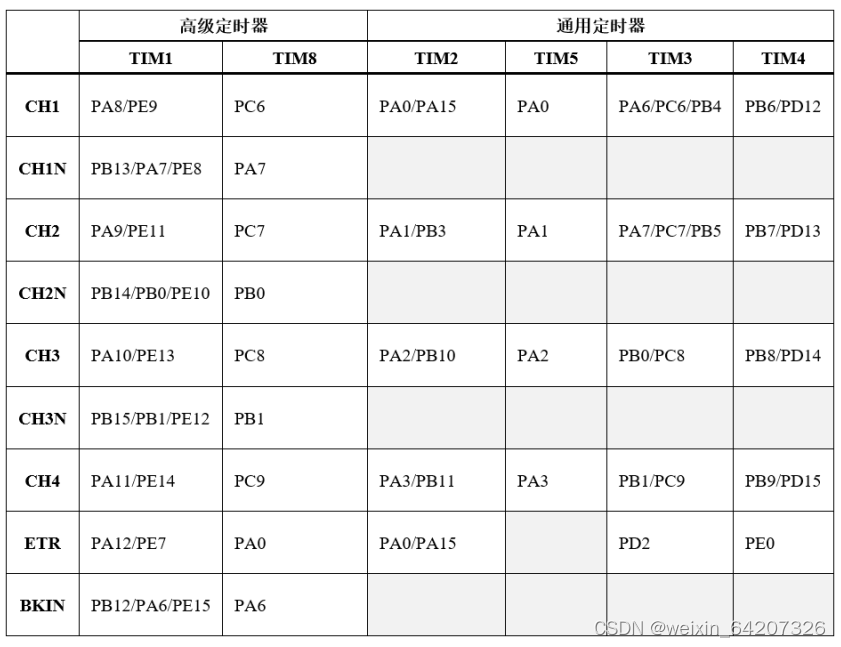
以下为一个定时器多个通道输出PWM
void BoardController::Timer4FourChannelPWMInit(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB, ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4,ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_OD;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;
//TIM4_CH1 CH2 CH3 CH4
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7|GPIO_Pin_8|GPIO_Pin_9;
GPIO_Init(GPIOB, &GPIO_InitStructure);
// 输出比较复用引脚映射到TIM4
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_TIM4);// CH1
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_TIM4);// CH2
GPIO_PinAFConfig(GPIOB, GPIO_PinSource8, GPIO_AF_TIM4);// CH3
GPIO_PinAFConfig(GPIOB, GPIO_PinSource9, GPIO_AF_TIM4);// CH4
TIM_TimeBaseStructure.TIM_Prescaler = 84-1; // 定时器计数频率 1MHz
TIM_TimeBaseStructure.TIM_Period = 65535-1; // 自动从装载值,定时器从0到65534计数65535次
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_Toggle; // 定时器配置成输出比较翻转(Toggle)模式
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 0;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;// 通道引脚默认输出高电平
TIM_OC1Init(TIM4, &TIM_OCInitStructure);
TIM_OC2Init(TIM4, &TIM_OCInitStructure);
TIM_OC3Init(TIM4, &TIM_OCInitStructure);
TIM_OC4Init(TIM4, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM4,TIM_OCPreload_Disable);
TIM_OC2PreloadConfig(TIM4,TIM_OCPreload_Disable);
TIM_OC3PreloadConfig(TIM4,TIM_OCPreload_Disable);
TIM_OC4PreloadConfig(TIM4,TIM_OCPreload_Disable);
// 先失能输出比较通道,失能捕获比较中断,默认不输出PWM,后面有函数使能通道和中断,使单片机输出PWM
TIM_ITConfig(TIM4,TIM_IT_CC1|TIM_IT_CC2|TIM_IT_CC3|TIM_IT_CC4,DISABLE);
TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);
TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);
TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);
TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);
TIM_Cmd(TIM4,ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = TIM4_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
} // 输出比较复用引脚映射到TIM4
GPIO_PinAFConfig(GPIOB, GPIO_PinSource6, GPIO_AF_TIM4);// CH1
GPIO_PinAFConfig(GPIOB, GPIO_PinSource7, GPIO_AF_TIM4);// CH2
GPIO_PinAFConfig(GPIOB, GPIO_PinSource8, GPIO_AF_TIM4);// CH3
GPIO_PinAFConfig(GPIOB, GPIO_PinSource9, GPIO_AF_TIM4);// CH4
GPIO_PinAFConfig为复用功能函数,将GPIO6、7、8、9复用作定时器4通道1、2、3、4的输出















 4787
4787











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









