






 这篇博客分享了一款基于STM32的串级PID循迹小车的设计,采用阿克曼转向结构和舵机,结合双光电编码电机与TB6612稳压模块。作者使用位置式PD算法控制舵机,增量式PID处理编码电机,并提供了源代码链接。为提高精度,提出了引入六轴姿态传感器或运动学模型的优化方案,以解决转弯时的跳轮问题。
这篇博客分享了一款基于STM32的串级PID循迹小车的设计,采用阿克曼转向结构和舵机,结合双光电编码电机与TB6612稳压模块。作者使用位置式PD算法控制舵机,增量式PID处理编码电机,并提供了源代码链接。为提高精度,提出了引入六轴姿态传感器或运动学模型的优化方案,以解决转弯时的跳轮问题。
该设计源于大一上的一次比赛,但本次比赛因疫情取消了,比较遗憾。在这里分享给像我一样的初学者们,希望能对你们有所帮助
主要系统硬件:阿克曼转向结构+舵机+双光电编码电机+TB6612稳压模块+STM32F103ZET6微控制器+7路灰度传感器
源码链接:基于STM32的串级pid循迹小车源代码-单片机文档类资源-CSDN下载
由于舵机要求高响应速度故使用位置式PD算法,由于编码电机对速度精确度要求较高故使用增量式PID串位置式PID的方法
工程架构如图:
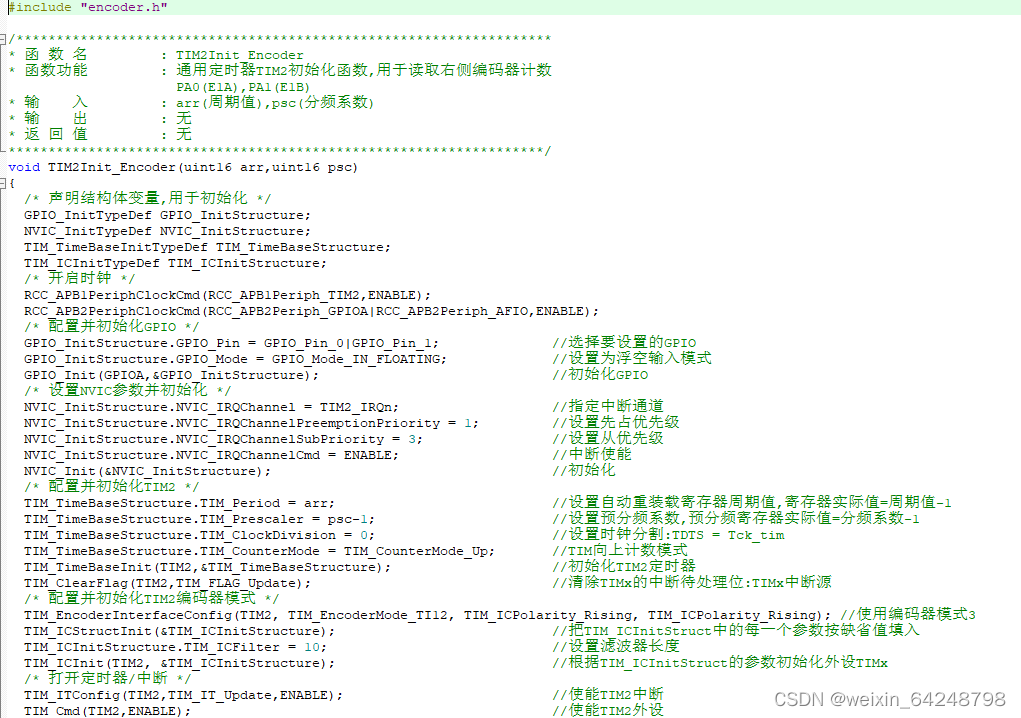
部分代码:
优化方法:使用六轴姿态传感器以取得更精准的控制,或引入舵机转角与左右轮差速的运动学数学模型以防止转弯时的跳轮现象


















 438
438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











