







 本文详细讲述了在设计有源蜂鸣器驱动电路中如何选择电阻,包括续流二极管的作用、限流电阻的设置以及对三极管放大的理解。作者通过实例解析了如何确保电路安全并正确工作。
本文详细讲述了在设计有源蜂鸣器驱动电路中如何选择电阻,包括续流二极管的作用、限流电阻的设置以及对三极管放大的理解。作者通过实例解析了如何确保电路安全并正确工作。
在设计蜂鸣器驱动电路的时候卡在了电阻值参数选定上,文章将从头到尾讲清楚三极管是怎么驱动蜂鸣器的。
1、蜂鸣器的分类
蜂鸣器简单分为有源和无源两种,所谓的“源”不是电源,可以简单的理解为有无振荡源。我们一般用的是有源蜂鸣器。有源蜂鸣器只需单片机的GPIO口给电平即可驱动。无源蜂鸣器需要用PWM波驱动,本人也是新手小白,哈哈哈,所以这篇文章分析的是有源蜂鸣器,无源蜂鸣器还有待探索。
2、驱动电路
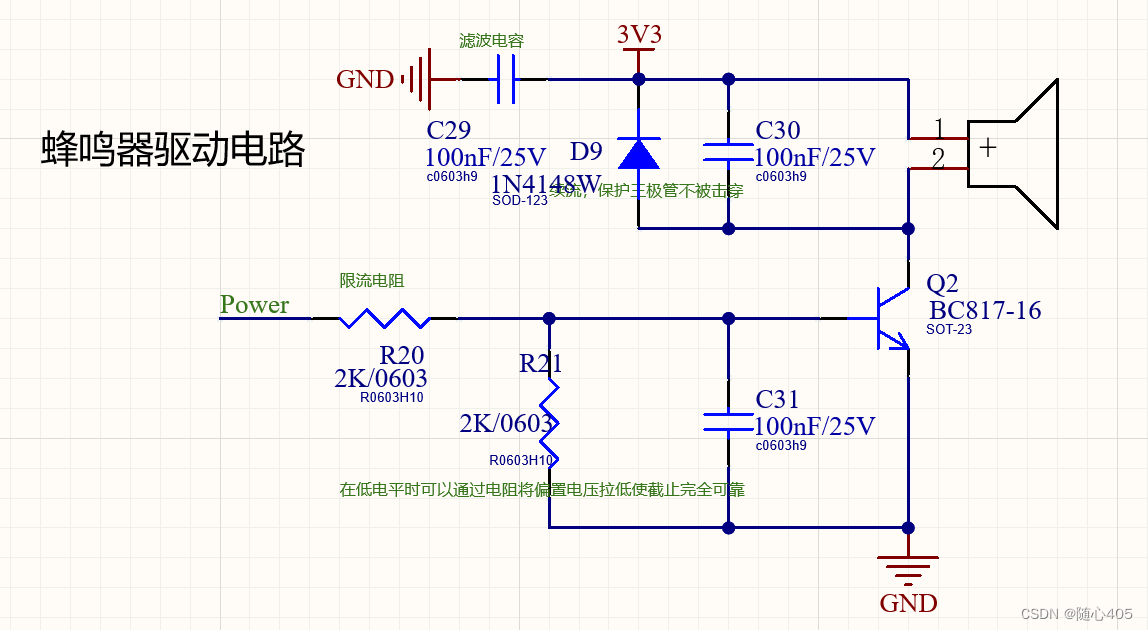
D9:是一个续流二极管,蜂鸣器本质上是一个感性元件,其电流不能瞬变,因此必须有一个续流二极管提供续流。否则,在蜂鸣器两端会产生几十伏的尖峰电压,可能损坏驱动三极管,并干扰整个电路系统的其它部分。
R20:是一个限流电阻,防止输出电流过大损坏三极管。
R21:相当于基极的下拉电阻。如果端口被悬空则由于R2的存在能够使三极管保持在可靠的关断状态(在电路关断时,因为三极管有结间电容,三极管be段端电压由0.7V缓慢下降,三极管没有完全关断,且处较于长时间放大状态,会损坏三极管)。如果删除R2则当power输入端悬空时则易受到干扰而可能导致三极管状态发生意外翻转或进入不期望的放大状态,造成蜂鸣器意外发声。所以加个下拉电阻,进行放电。
提升高电平的门槛电压。如果删除R2,则三极管的高电平门槛电压就只有0.7V,即A端输入电压只要超过0
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1100
1100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









