






 本文探讨了如何利用城市公交网络和无人机为无线可充电传感器网络提供能量,提出了一种无人机调度方法,通过DSA和DDSA算法分别优化总时间成本和传感器存活率。研究显示,新方法显著提高了效率并增强了网络的可持续性。
本文探讨了如何利用城市公交网络和无人机为无线可充电传感器网络提供能量,提出了一种无人机调度方法,通过DSA和DDSA算法分别优化总时间成本和传感器存活率。研究显示,新方法显著提高了效率并增强了网络的可持续性。
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
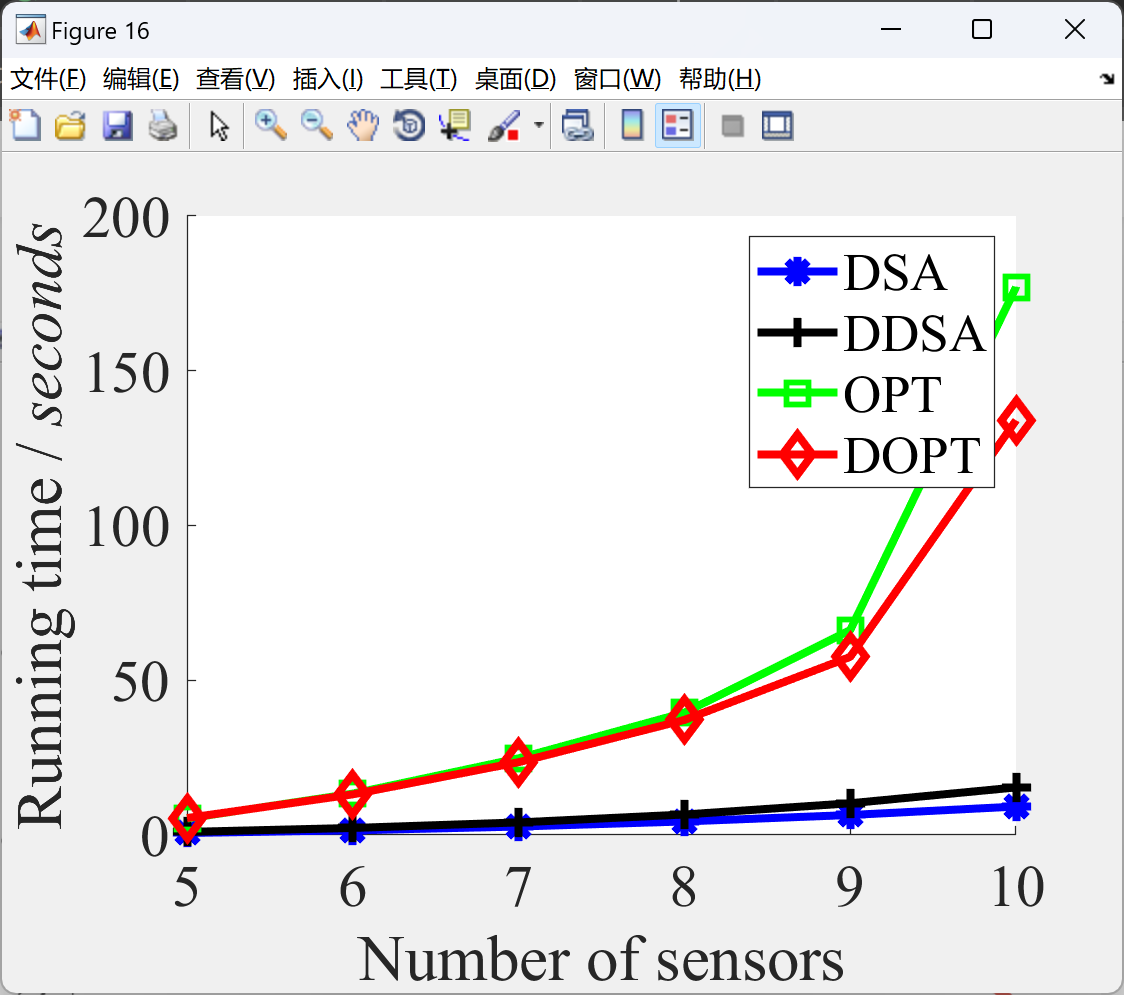
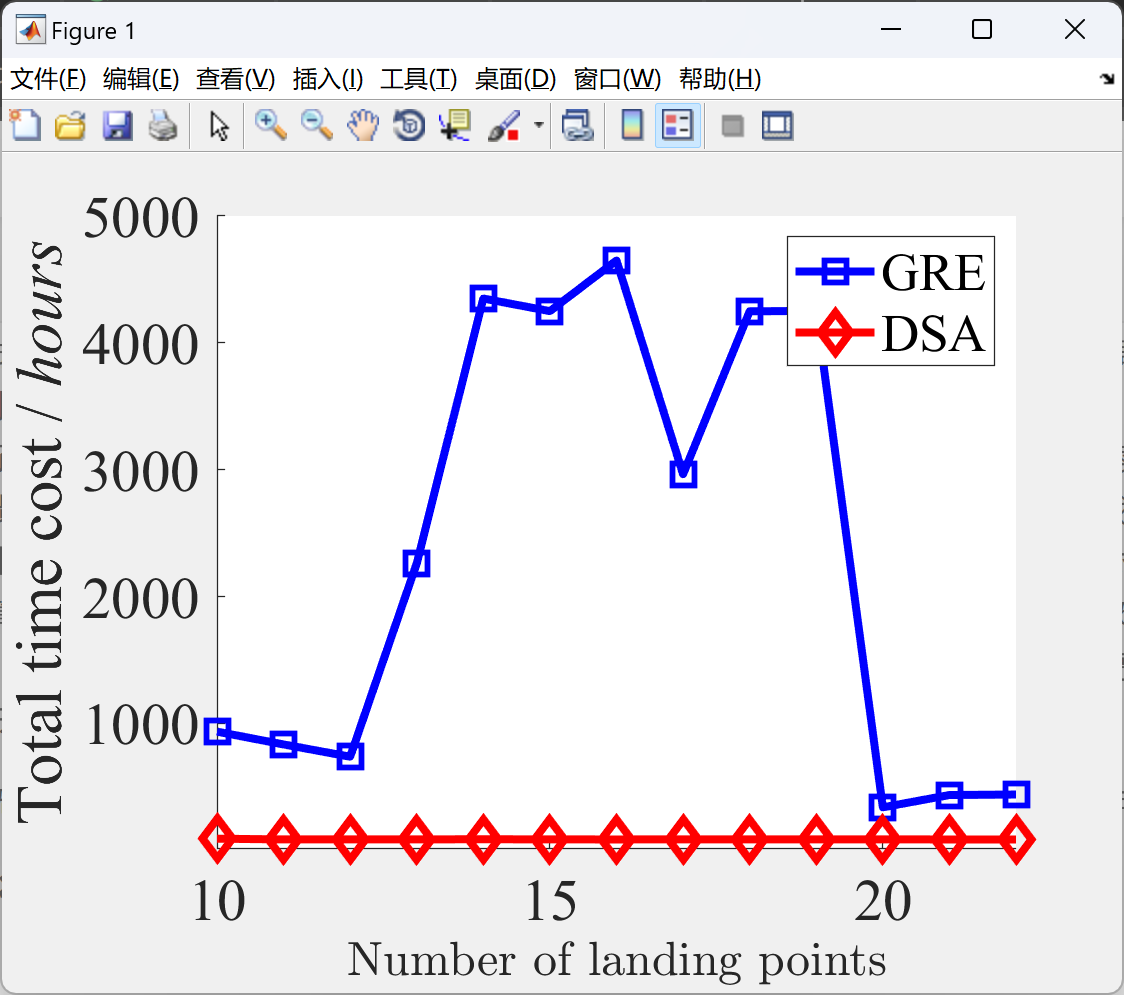
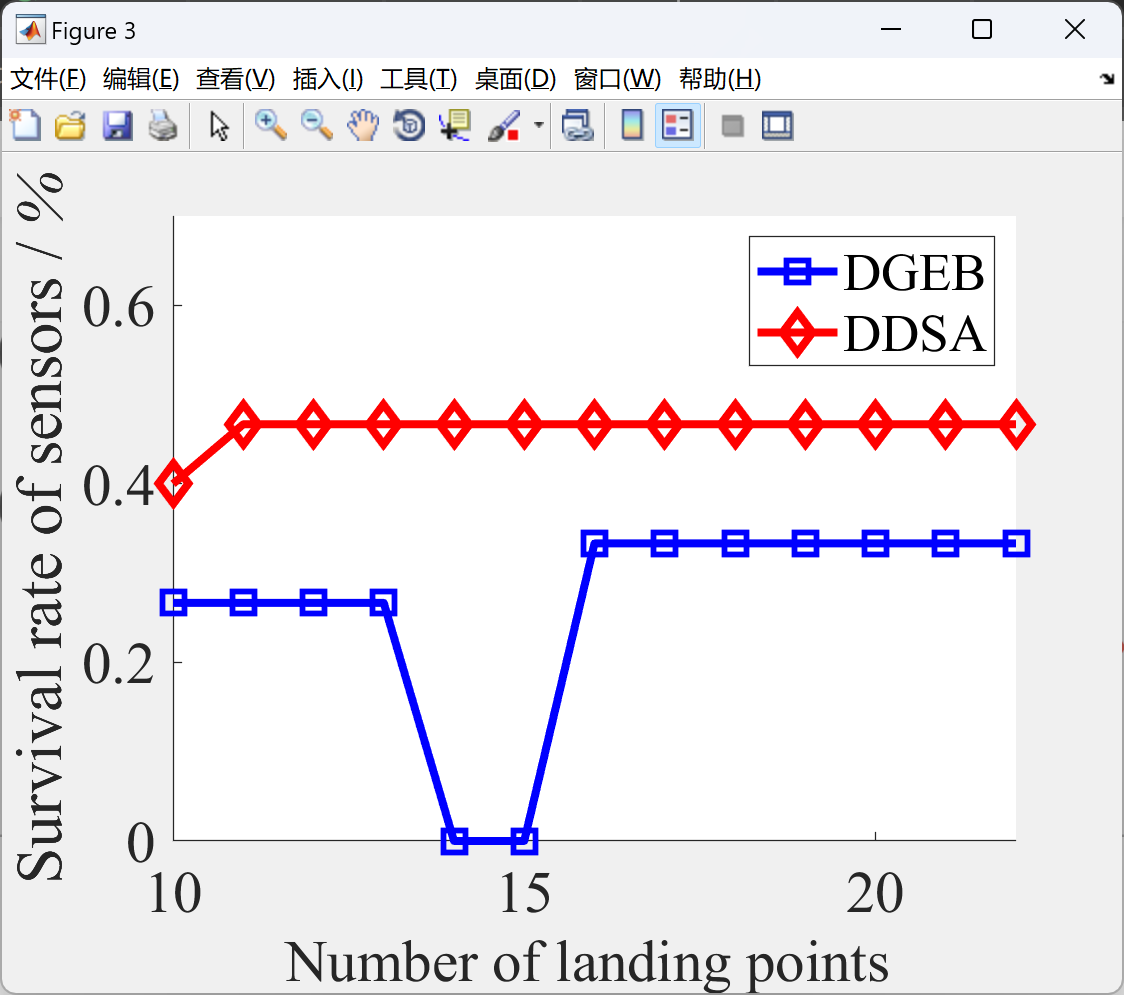
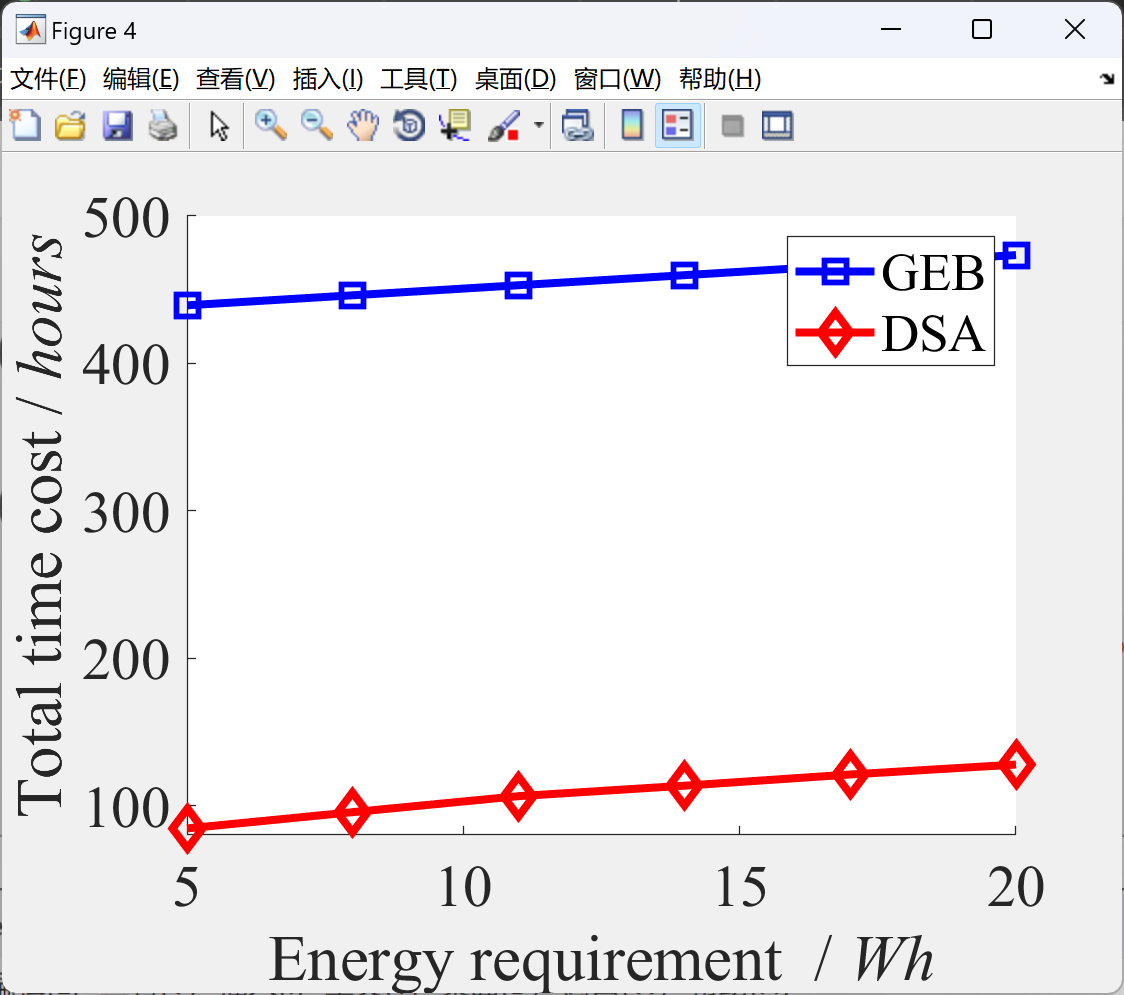
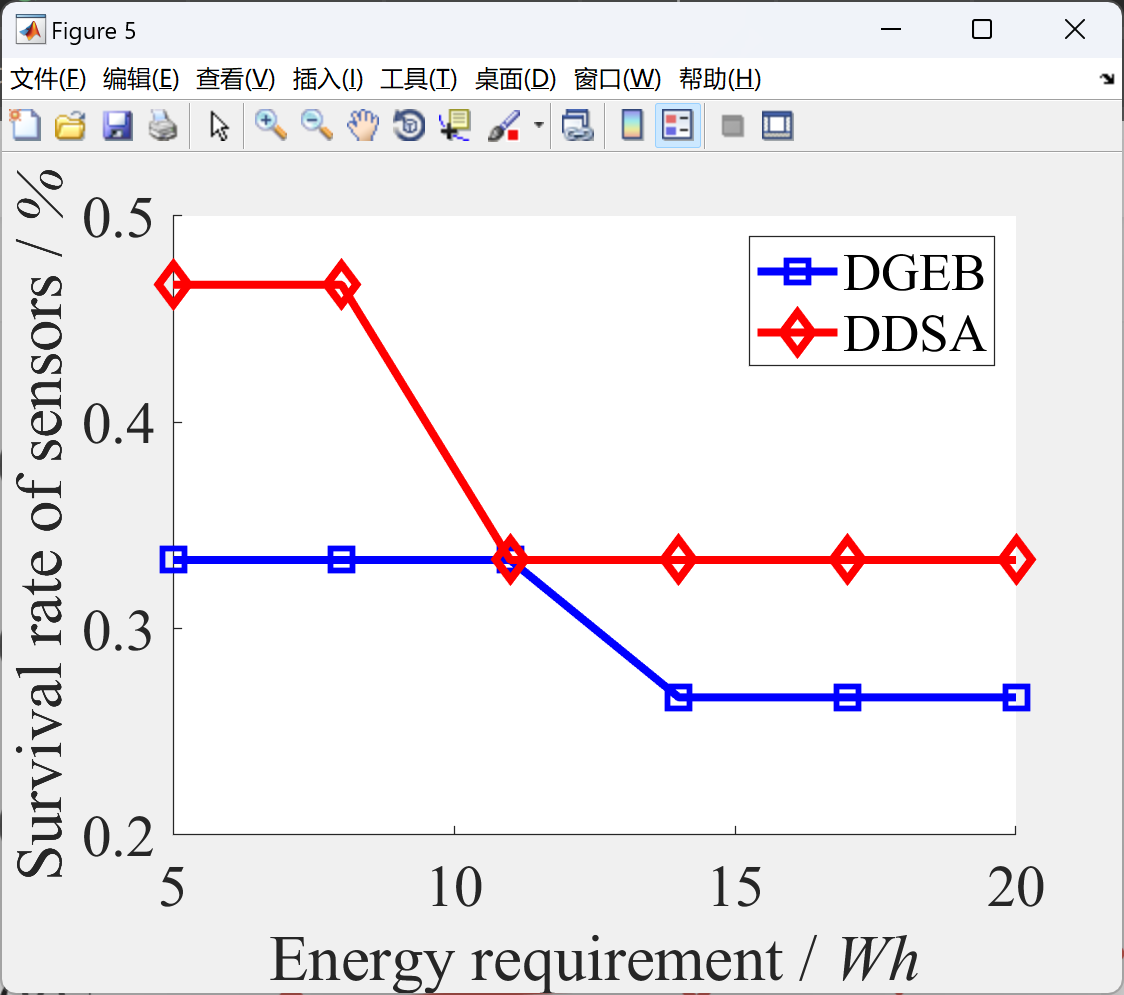
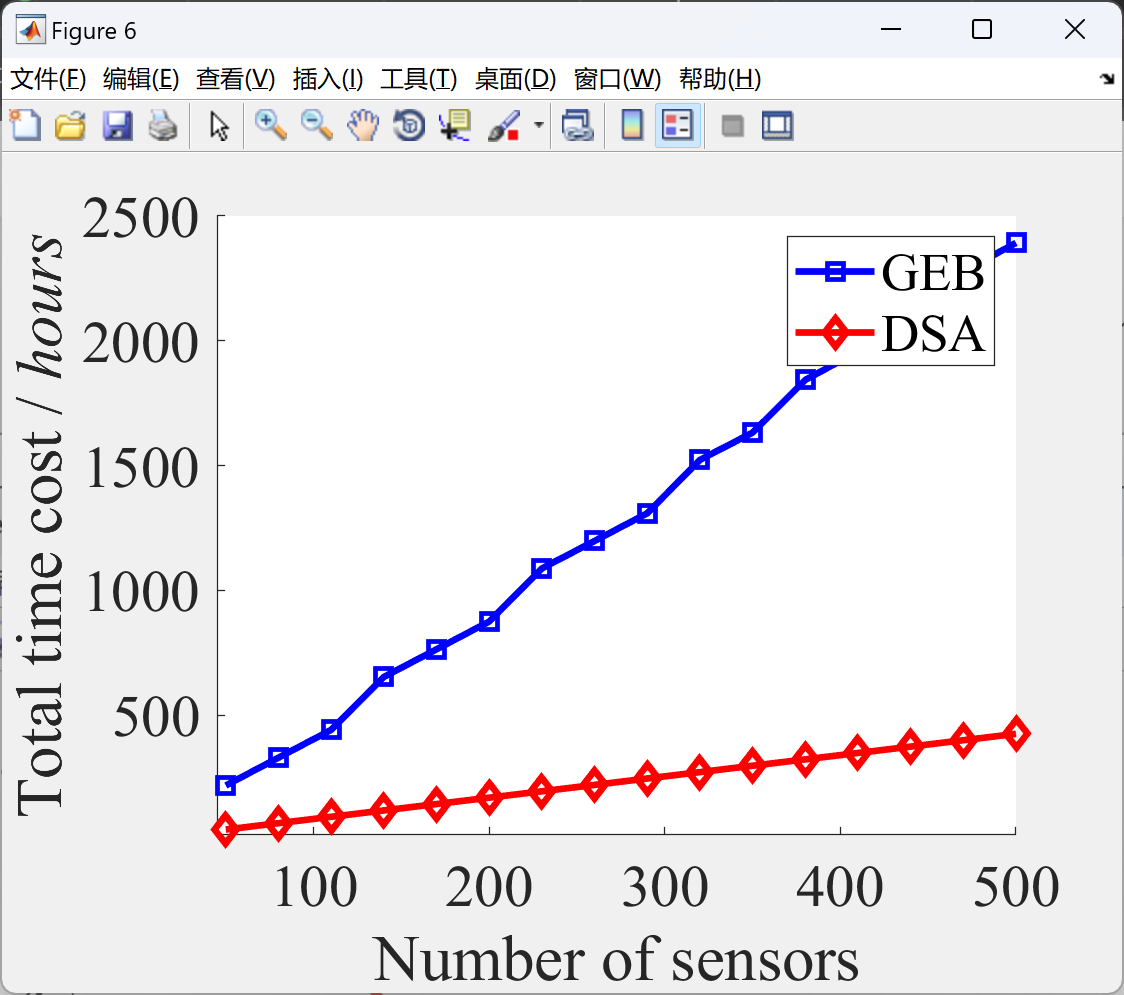
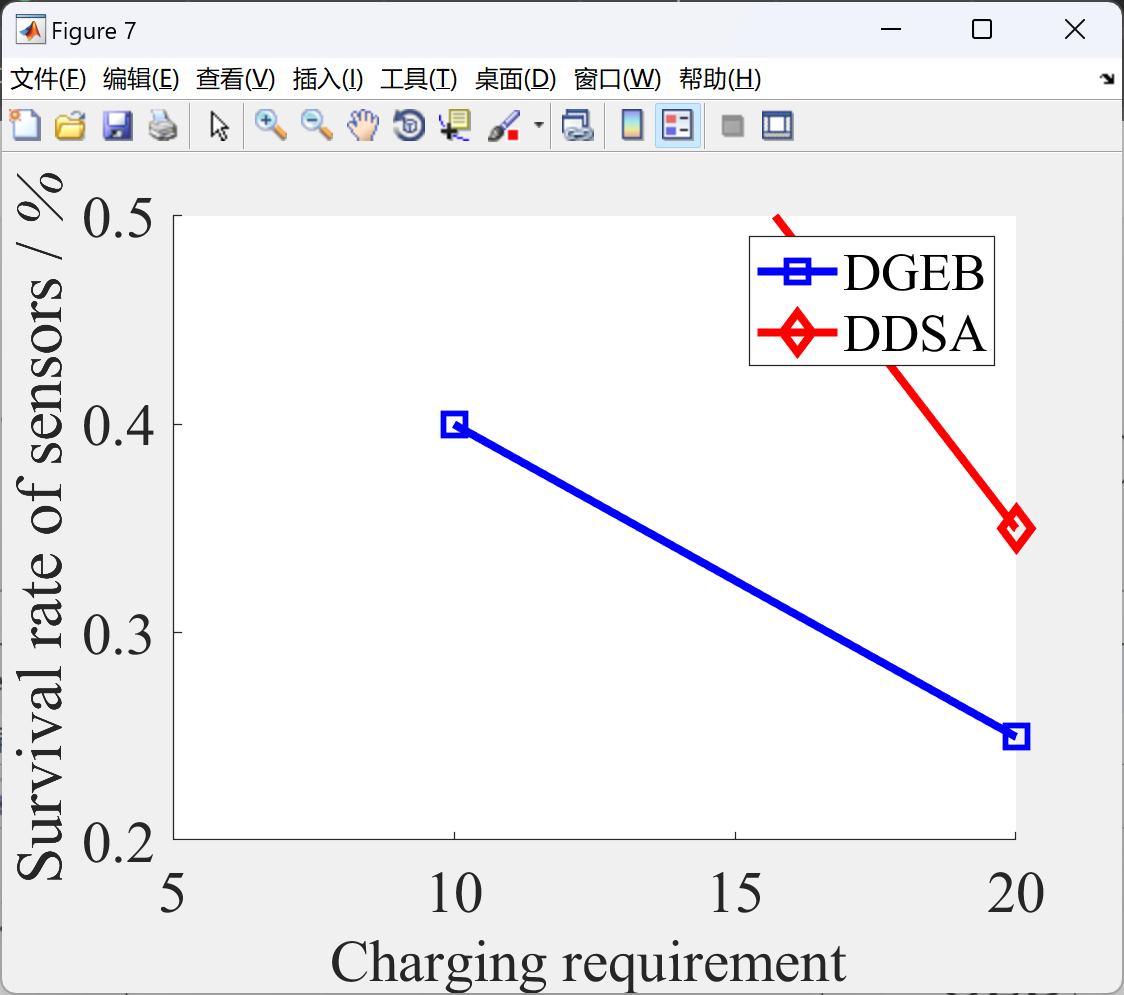
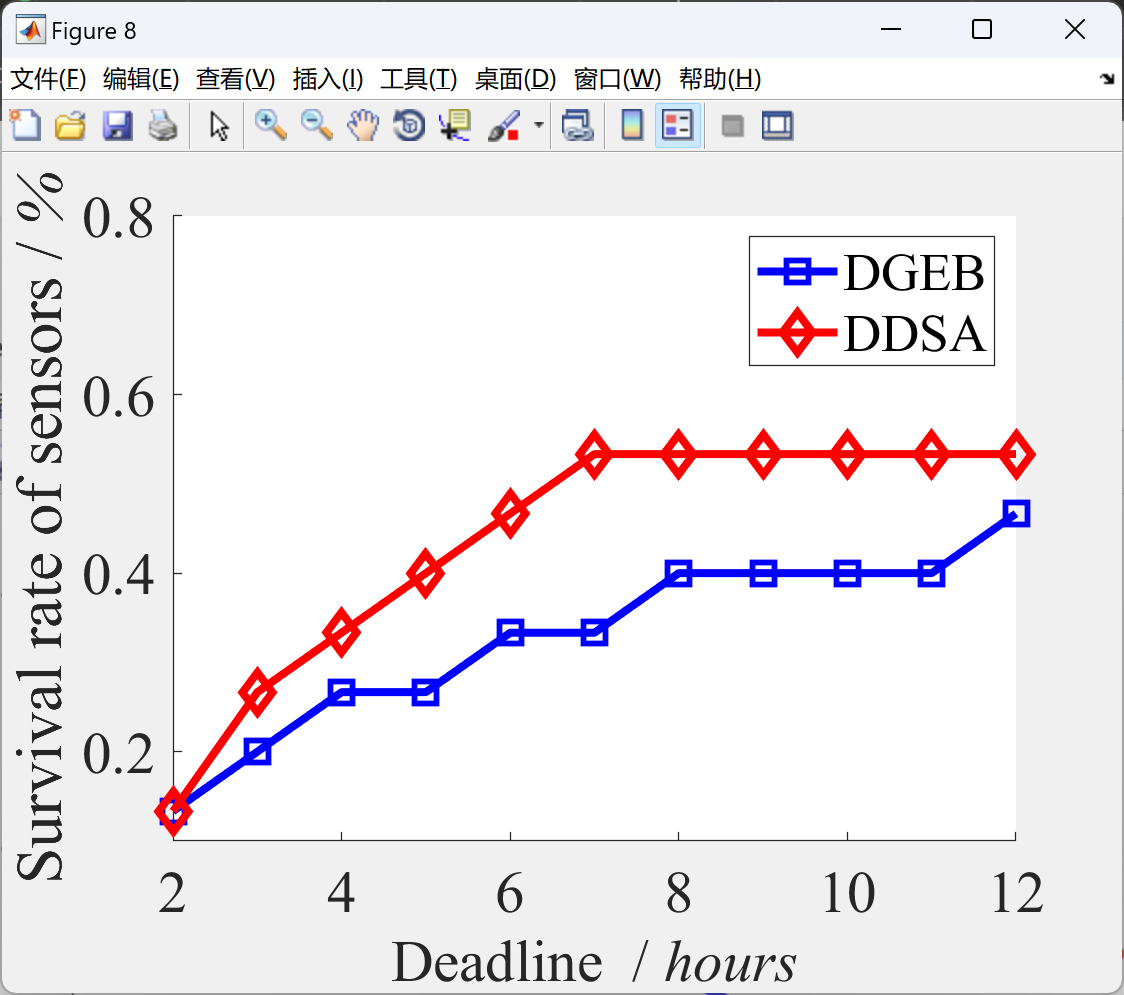
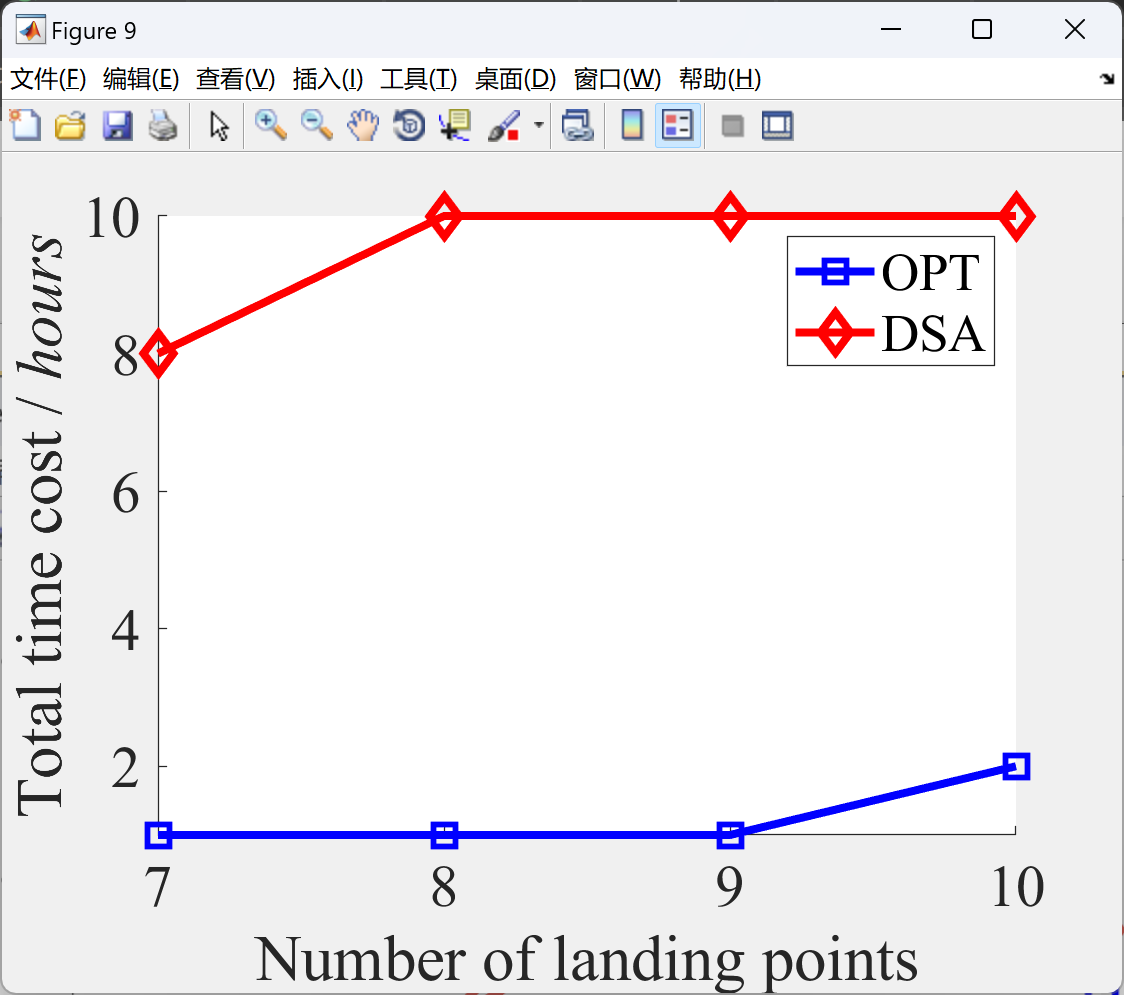
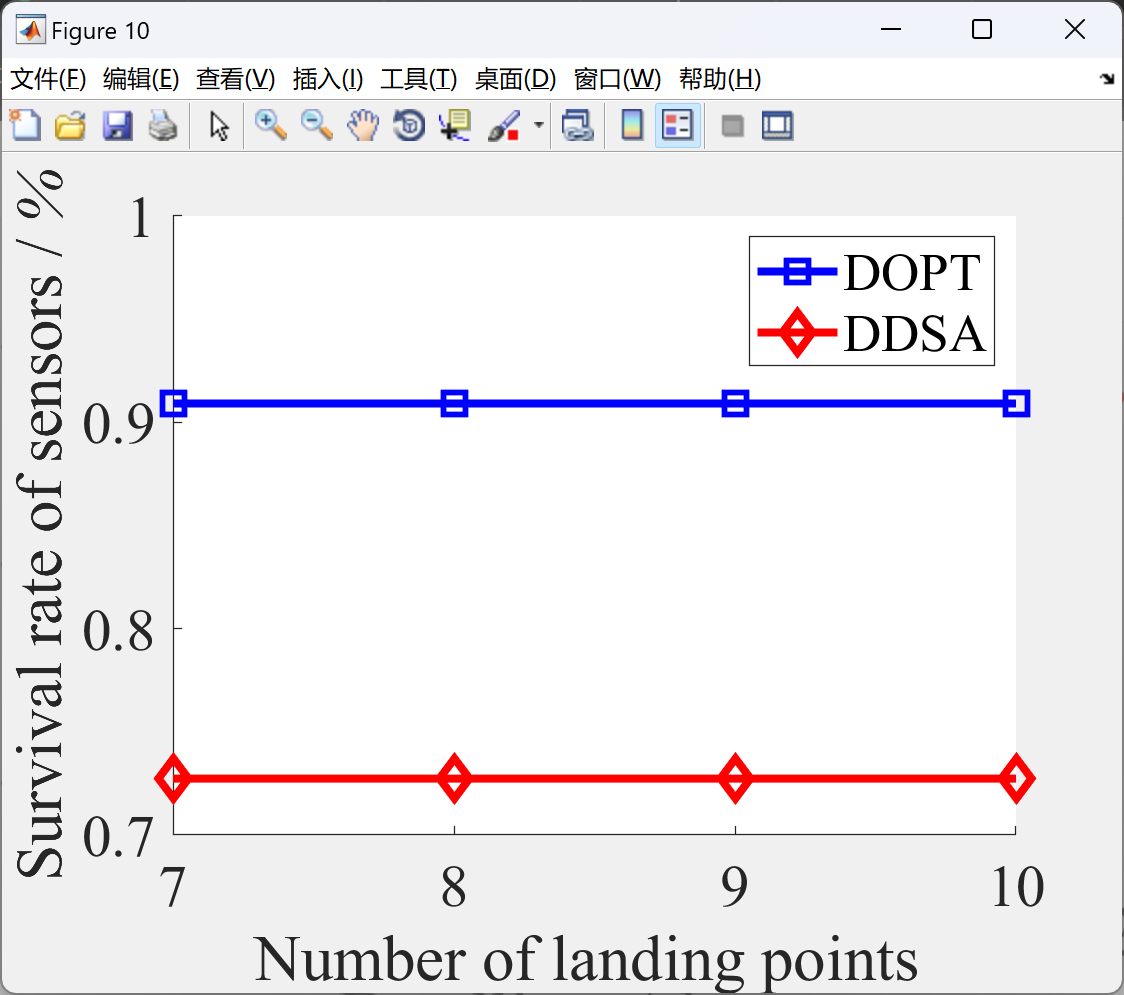
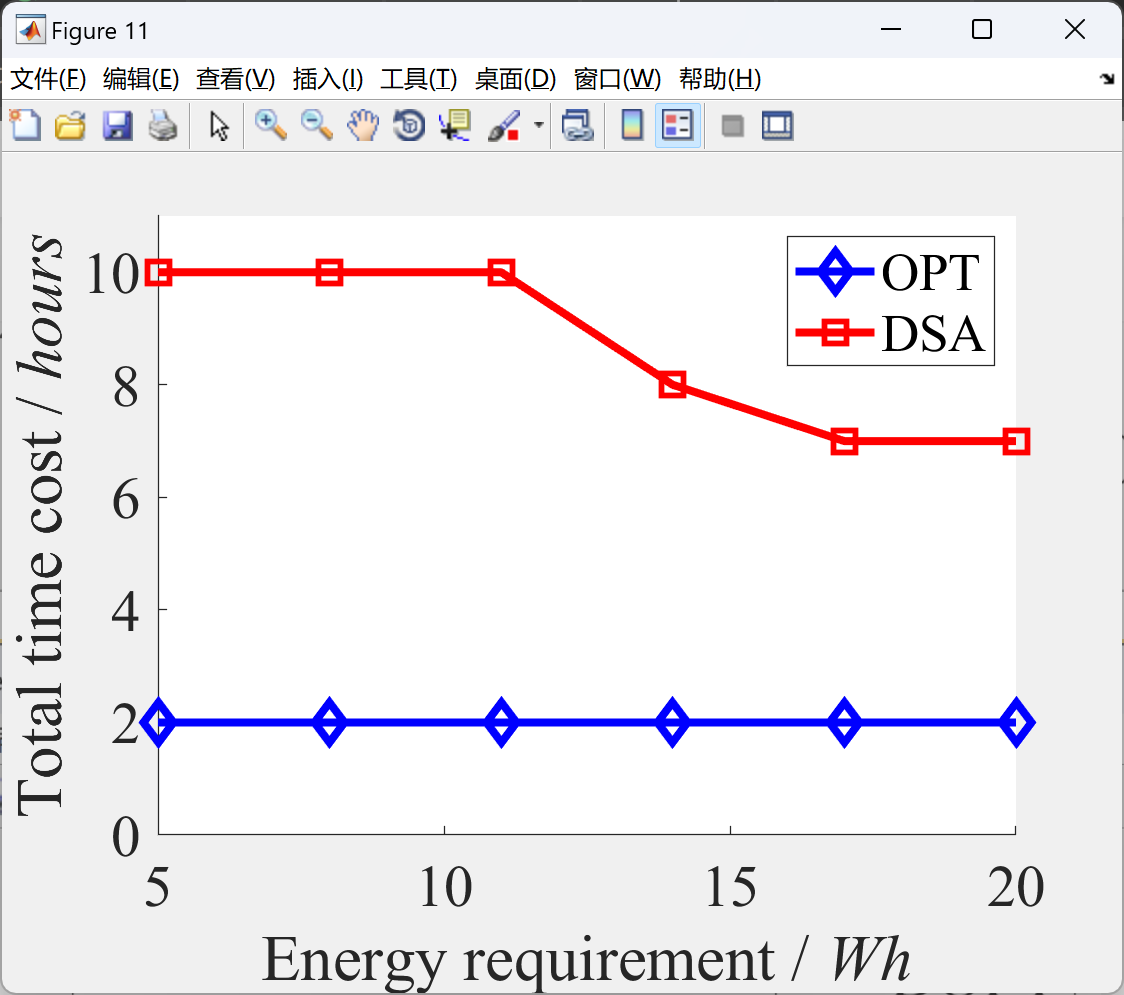
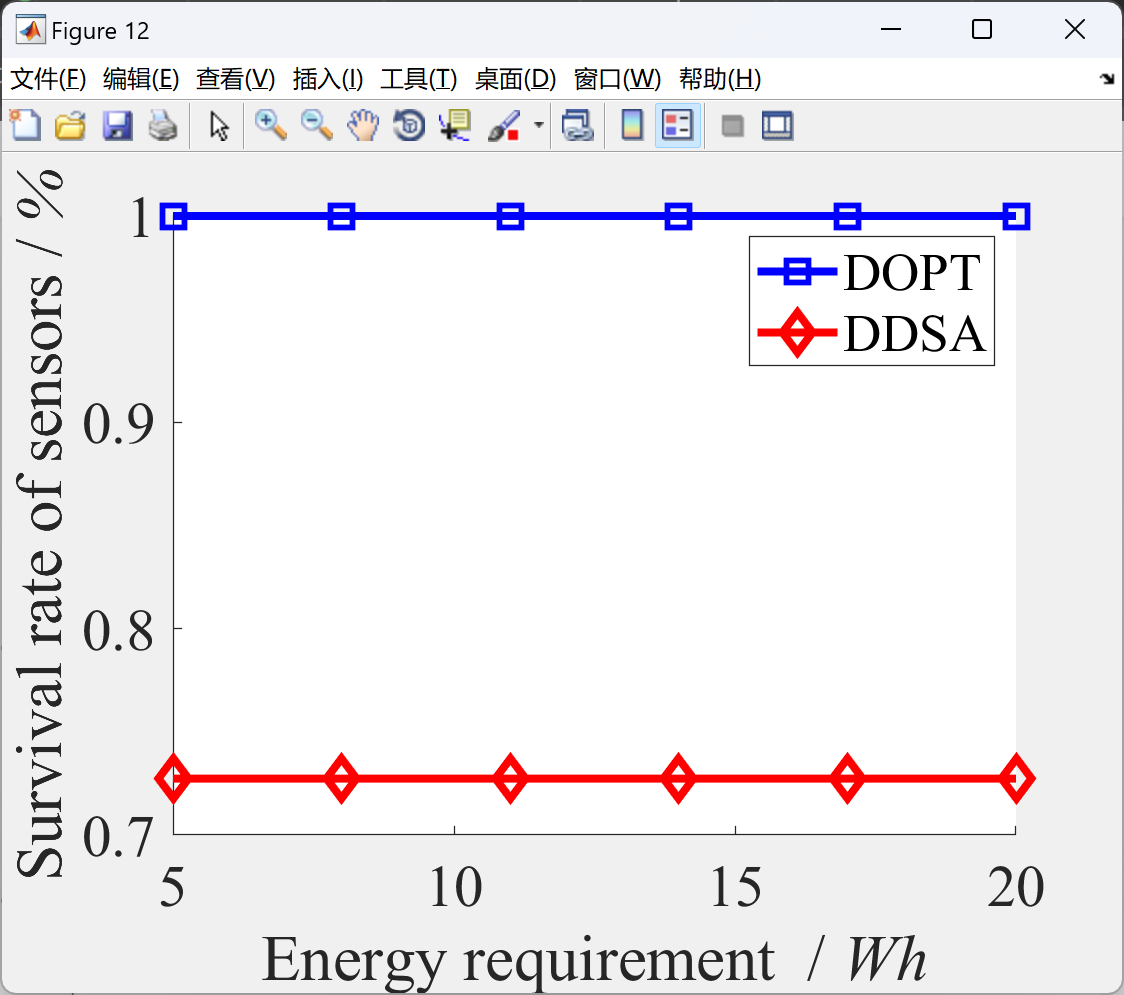
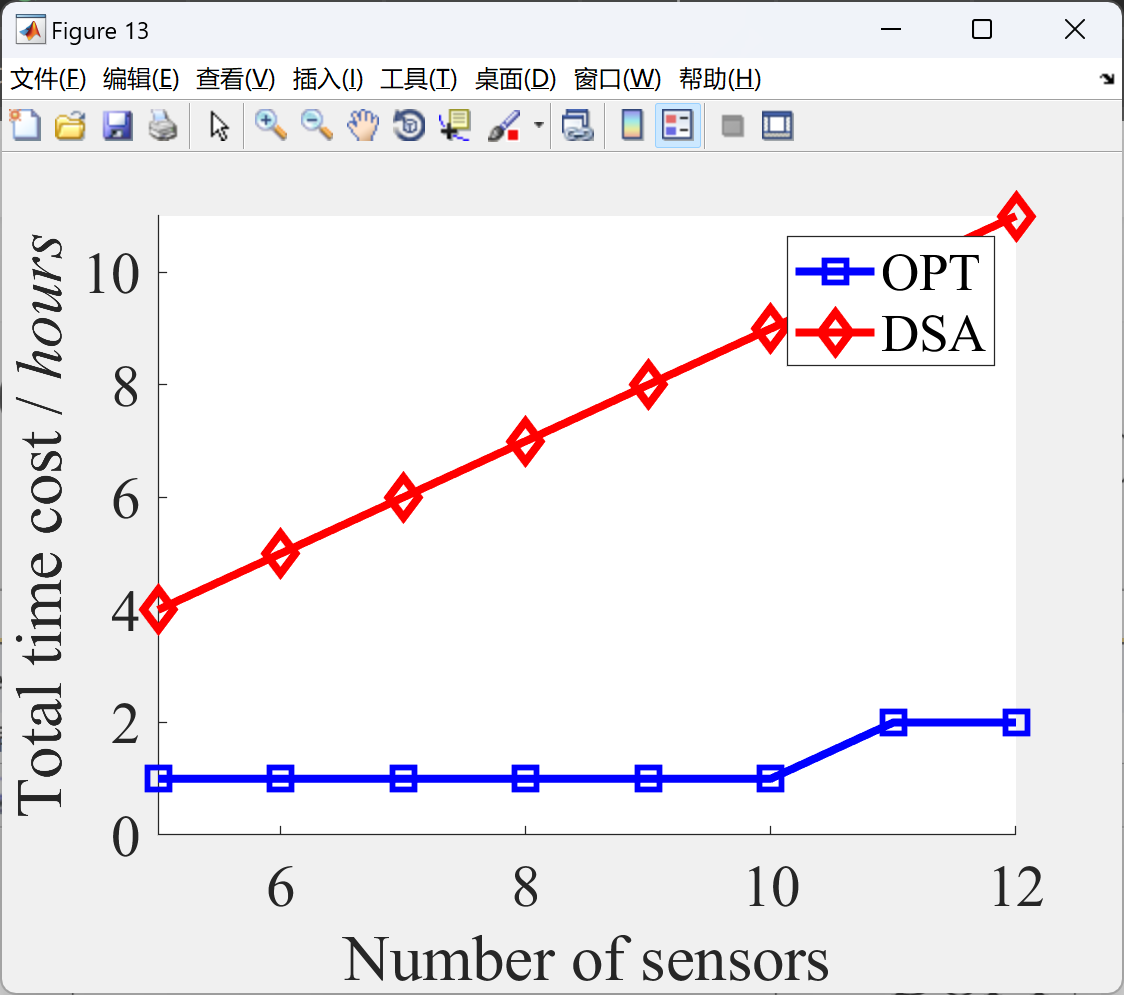
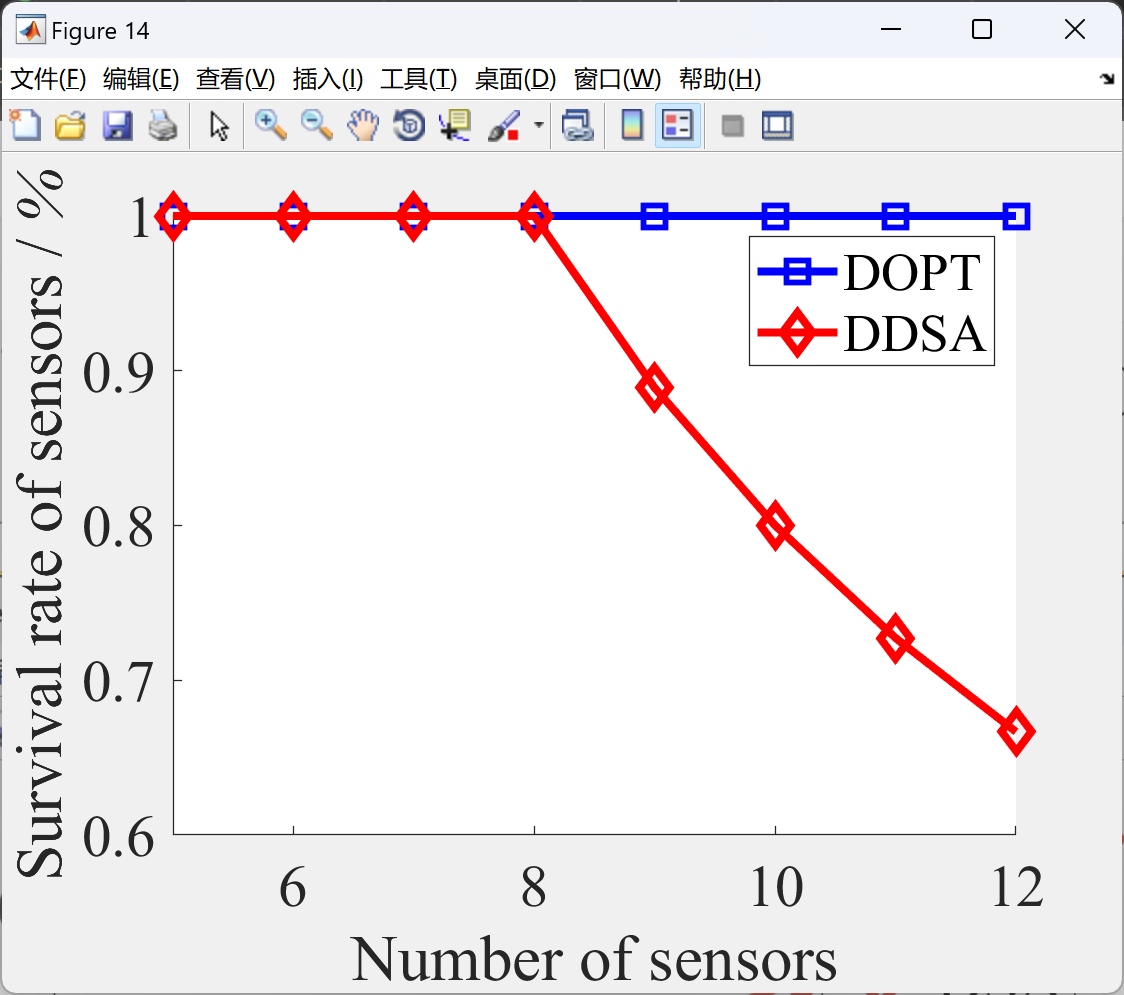
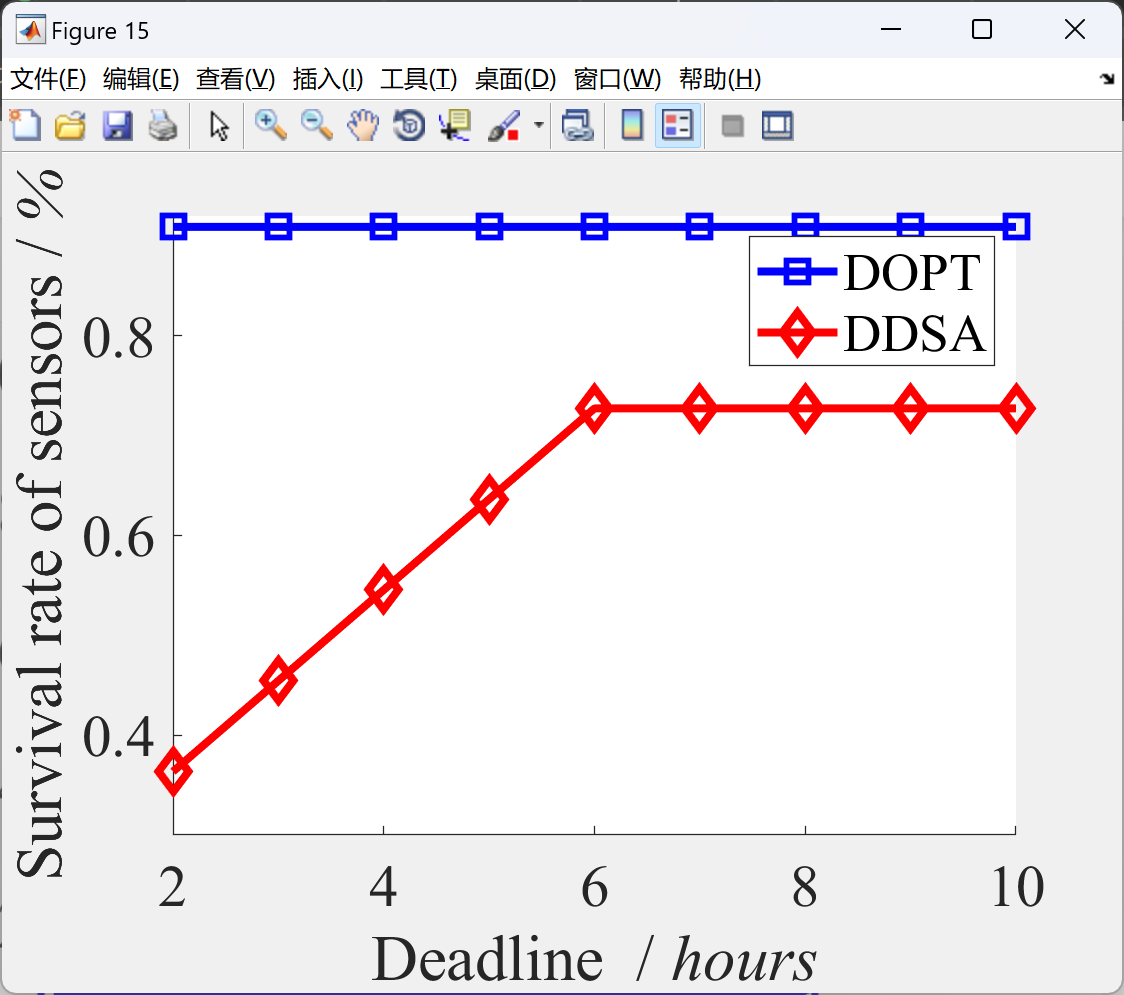
摘要:无线可充电传感器网络(WRSN)被广泛应用于环境和交通监测、视频监控和医疗护理等领域,有助于提高城市生活质量。然而,在建筑物、土壤或其他难以从环境中获取能量的地方部署传感器,为其提供可持续能源是具有挑战性的。为解决这一问题,我们设计了一种新的无线充电系统,利用城市区域的公交网络辅助无人机。我们根据这一新的无线充电系统制定了无人机调度问题,以最小化无人机的总时间成本,同时满足无人机能够在能量约束下为所有传感器充电。然后,我们提出了一种逼近算法DSA来解决能量受限的无人机调度问题。为使WRSN的任务可持续进行,我们进一步制定了带有传感器截止日期的无人机调度问题,并提出了逼近算法DDSA,以找到在截止日期前由无人机充电的传感器数量最大的无人机调度。通过大量模拟,我们证明DSA相对于贪婪补充能量算法可以将总时间成本降低84.83%,并且平均使用的总时间成本最多是最优解的5.98倍。然后,我们还证明DDSA相对于截止日期贪婪补充能量算法可以将传感器的存活率提高51.95%,并且平均可以获得77.54%的最优解存活率。
关键词:无线可充电传感器网络、公交网络、无人机调度、旅行推销员路径问题、子模取向问题
📚2 运行结果
部分代码:
%主函数
tic
%U=5;%传感器的充电请求wh
distance_sl=10;%统一设置传感器与其最近起落点的距离为20km
dis_G=load('G.txt');%由landing points以及它们的边构成的无向图,权值是距离km
n_lpmax=length(dis_G);%起落点的个数
%fid=fopen('C:\codes\Figure12\b\result\6.txt','a');
fid=fopen('/code/Figure12/b/result/6.txt','a');
%%%%%%%%%%%%%%phase 1, construct undirected graph G
n_lp=n_lpmax-2;%传感器的个数
tao=6;
n_sensor=11;
G1=zeros(n_sensor,n_sensor);
for U=5:3:20
[Gt,Gc,dis_SL]=construct1(n_sensor,distance_sl,n_lp);
%%%%%%%%%%%%%第二阶段:求解两个传感器之间的满足能量约束的最短路和构造有向图G1
for i=1:n_sensor
for j=1:n_sensor
if i==j
G1(i,j)=0;
else
G1(i,j)=energy_sp(i,j,Gt,Gc,dis_SL,U,distance_sl,n_lp);%返回传感器i与传感器j之间路径的时间
end
end
end
%%%%%%%%%%%%%%%第三阶段:求解ATSPP问题
final_srs= allpath(G1,n_sensor,tao);
disp('输出DOPT算法的最终解');
fprintf(fid,'%d %7.4f\r\n ',U,final_srs);
end
fclose(fid);
disp('输出DOPT算法的运行时间');
toc
%U=5;%传感器的充电请求wh
distance_sl=10;%统一设置传感器与其最近起落点的距离为20km
dis_G=load('G.txt');%由landing points以及它们的边构成的无向图,权值是距离km
n_lpmax=length(dis_G);%起落点的个数
%fid=fopen('C:\codes\Figure6\a\result\2.txt','a');
fid=fopen('/code/Figure6/a/result/2.txt','a');
%%%%%%%%%%%%%%phase 1, construct undirected graph G
n_sensor=100;%传感器的个数
n_lp=n_lpmax;
G1=zeros(n_sensor,n_sensor);
for U=5:3:20
[Gt,Gc,dis_SL]=construct1(n_sensor,distance_sl,n_lp);
%%%%%%%%%%%%%第二阶段:求解两个传感器之间的满足能量约束的最短路和构造有向图G1
for i=1:n_sensor
for j=1:n_sensor
if i==j
G1(i,j)=0;
else
G1(i,j)=energy_sp(i,j,Gt,Gc,dis_SL,U,distance_sl,n_lp);%返回传感器i与传感器j之间路径的时间
end
end
end
%%%%%%%%%%%%%%%第三阶段:求解ATSPP问题
final_time=zeros(1,n_sensor);
for i=2:n_sensor
disp('输出第1个传感器到第i个传感器的final solution of ATSPP');
i
final_time(i)= ATSPP(G1,1,i,n_sensor);
end
final_time(final_time==0)=[];
disp('输出DSA算法的最终解');
final_solution=min(final_time)
fprintf(fid,'%d %7.4f\r\n ',U,final_solution);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
















 2452
2452











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









