







 HybridAStar算法是一种结合A*算法和车辆动力学的路径规划方法,它在连续空间上搜索最短路径并考虑车辆的非完整性约束。与A*不同,HybridA*不进行空间离散化,而是利用Dubins或Reeps-Shepp模型。算法通过两种可接受的启发式函数(constrained和unconstrained)进行节点扩展,兼顾障碍物和车辆限制。路径平滑是算法的一个关键方面,确保生成的轨迹实际可行。
HybridAStar算法是一种结合A*算法和车辆动力学的路径规划方法,它在连续空间上搜索最短路径并考虑车辆的非完整性约束。与A*不同,HybridA*不进行空间离散化,而是利用Dubins或Reeps-Shepp模型。算法通过两种可接受的启发式函数(constrained和unconstrained)进行节点扩展,兼顾障碍物和车辆限制。路径平滑是算法的一个关键方面,确保生成的轨迹实际可行。
总结
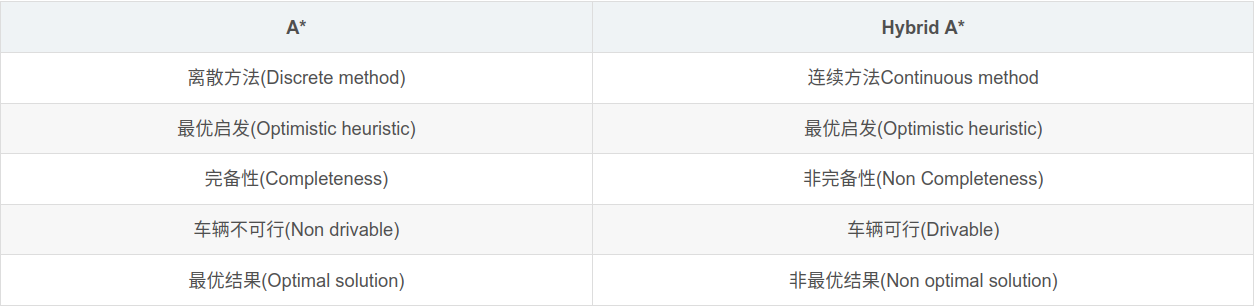
HybridAStar算法主要是在A* 基础上考虑车辆动力学相关的搜索算法,其放弃了A* 中对搜索空间离散化,利用Dubins或者Reeps-Shepp来考虑自车能够前进的位置,使得规划的轨迹满足车辆的非完整性约束,但是该Hybrid A* 牺牲了算法的完备性和最优性。
1.在连续空间上扩张节点搜索最短路径
2.路径平滑
Hybrid A* 算法与A* 算法的差异对比如下表所示
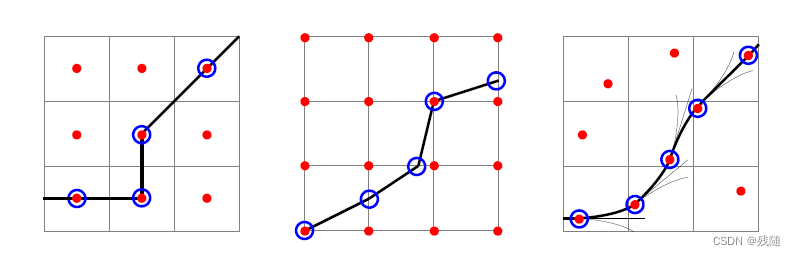
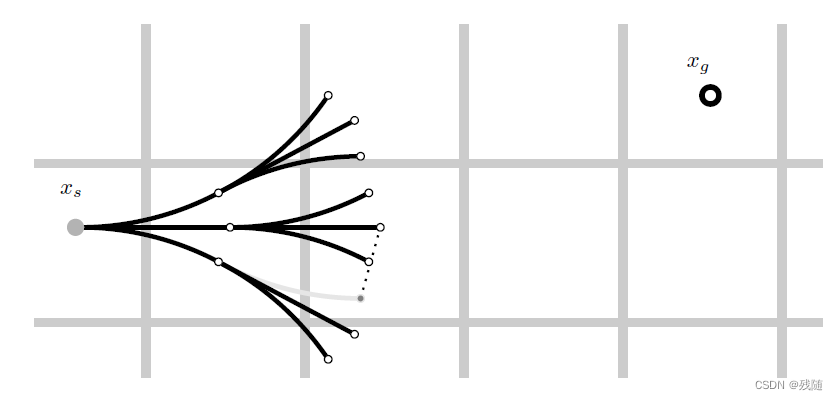
 如下图所示,最左侧图是A算法的结果,最右侧是Hybrid A算法。(中间为A* 算法变种)
如下图所示,最左侧图是A算法的结果,最右侧是Hybrid A算法。(中间为A* 算法变种)
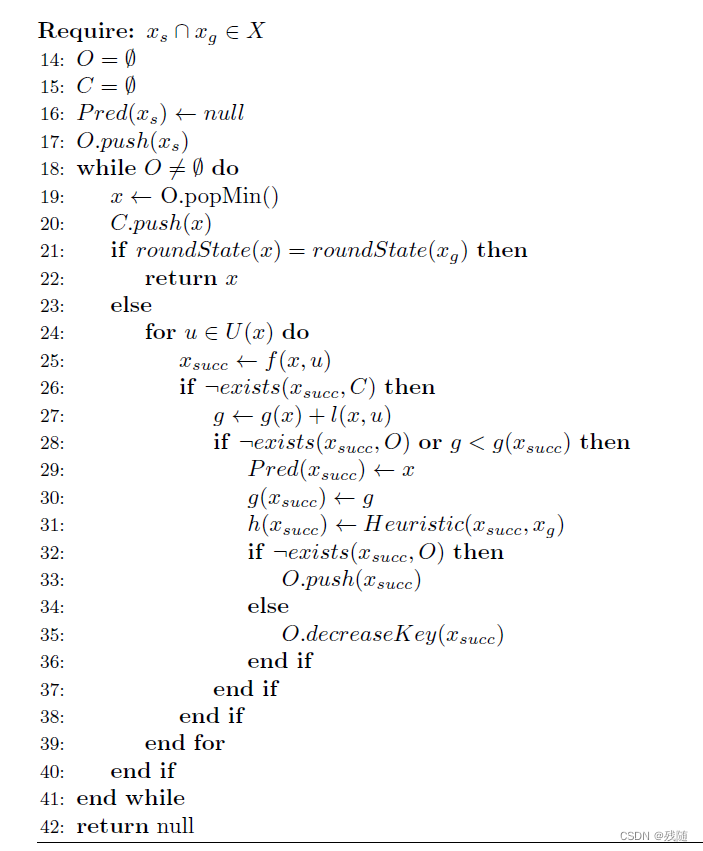
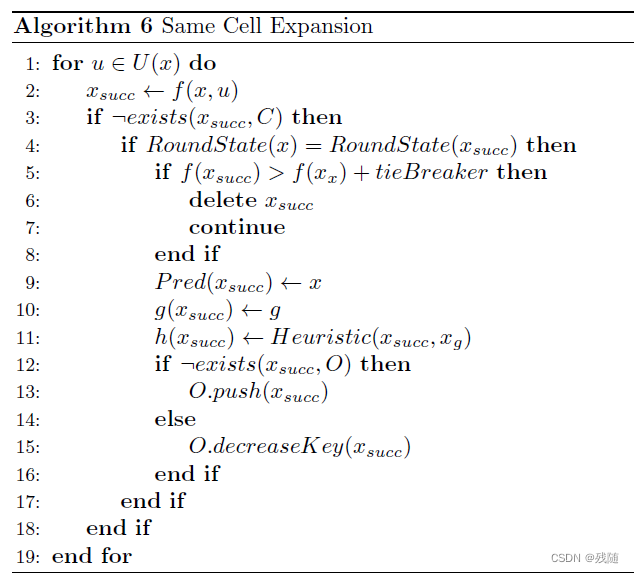
Hybrid A* 算法结构与A*算法流程极其类似,核心区别在于(1)生成子节点,(2)启发式函数设计。其伪代码如下
车辆非完整性约束
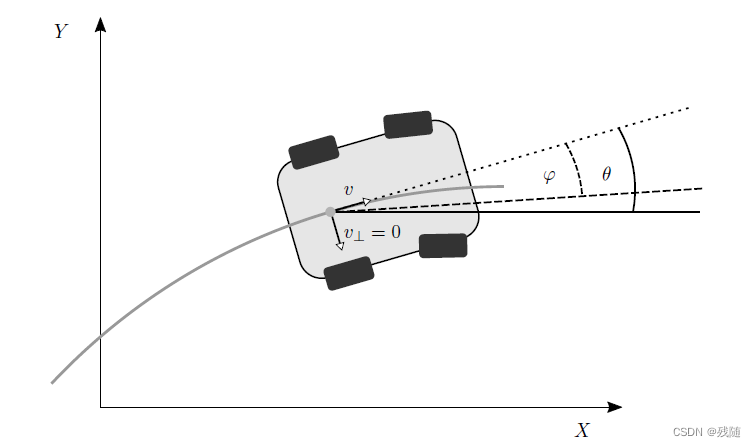
假设简单单车运动学模型

可以发现车辆运动需要满足下列的条件:

节点扩展
节点扩展主要是利用不同转弯角度生成不同的短距离节点,首先会根据局部轨迹是否碰撞决定是否评估该节点。如果无碰撞,可以利用生成节点的弧长来决定cost,当然也可以考虑转向带来的cost和行进方向变化的cost。
对于每个子节点,考虑节点到达的格子,
1.如果节点到达格子,且该格子不在closed set,表明这个格子还未被扩展,那么继续扩展评估。
2.如果格子不在open set (表明这个格子还未被之前任意节点扩展到达)且如果父节点的cost-so-far加上扩展到子节点到当前格子的cost小于当前节点的cost-so-far, 该新节点被认为是父节点的子节点, 同时更新g函数,并利用启发式函数估计cost-to-come,同时把子节点加入到open set.
启发式函数
Hybrid A*中使用两种启发式函数: constrained heuristic和unconstrained heuristic,其代表不同的节点扩展(expansion)的方式。
Constrained heuristic考虑车辆非完全性限制忽略环境障碍物。该启发式函数考虑车辆当前方向角(heading)和转向半径(turning radius),为了自车接近目标节点时候能够保持正确的姿态。常用的启发式函数值可以使用Dubins和Reeps-Shepp曲线计算两点之间的最短距离,所以该启发式函数式是可接受的(admissible)。
Unconstrained heuristic只考虑障碍物忽视车辆非完全性限制。该启发式函数可以完全基于当前点到目标点的最短路径距离计算。常用的启发式函数可以使用欧式距离等,所以该启发式函数也是可接受的(admissible)。
因为两个启发式函数都是可接受的,只需要去两者之间的最大值作为最终的启发式函数值。
 其中,l ( x )为扩展节点距离函数, d(x,xg)为当前节点到目标节点之间的函数。
其中,l ( x )为扩展节点距离函数, d(x,xg)为当前节点到目标节点之间的函数。
为了提高算法的效率,该启发函数值可以被存在查找表(lookup table)。

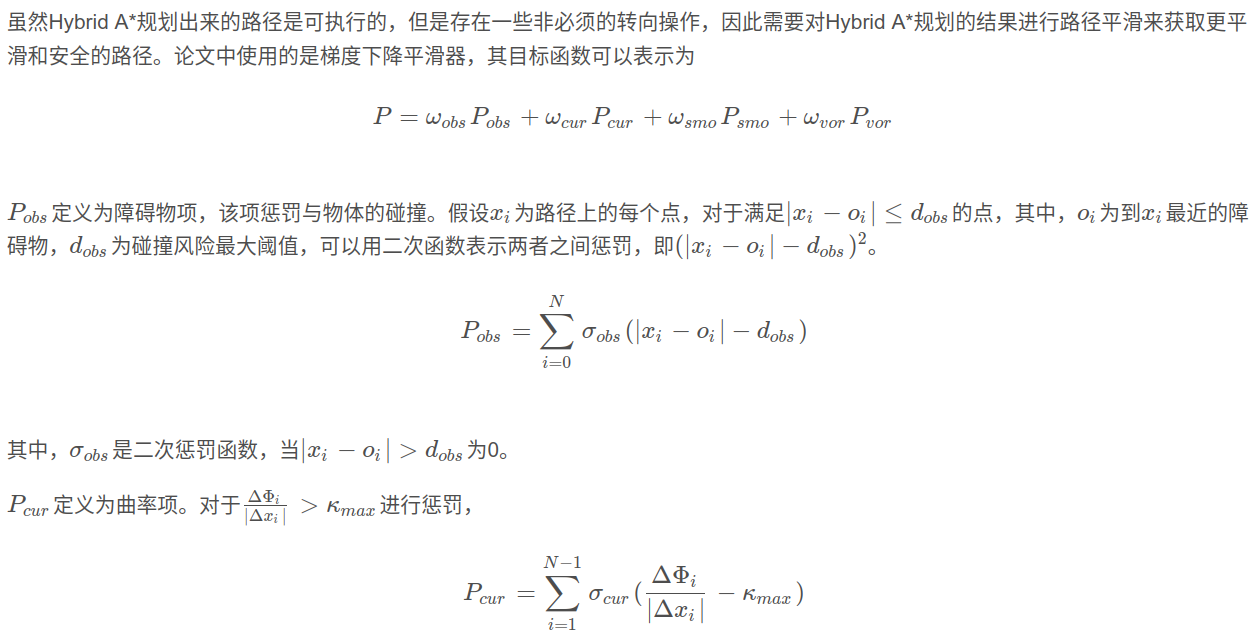
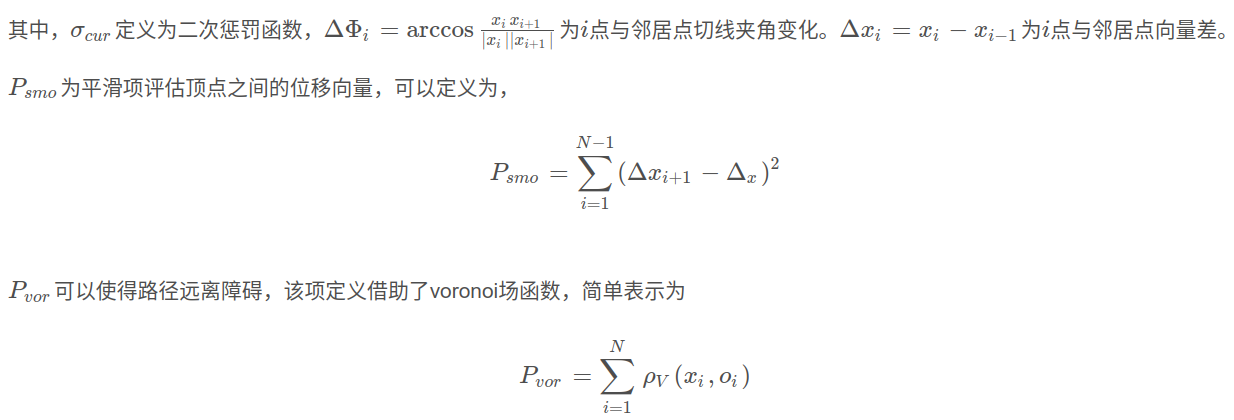
路径平滑

















 9919
9919

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









