






频率测量
频率测量有两种方法
- 测频法:在闸门时间T内,对上升沿或下降沿计次,得到N,则评率fx=N/T
- 测周法:两个上升沿内,以标准频率fc计次得到N,则频率fx= fc/N
- 中界频率:测频法和测周法误差相等的点fm=√(fc/T),fx大于fm选用测频法更准确。
定时器输入捕获测频原理
在说原理前需要先讲一下定时器的主从模式
主模式则是设置定时器输出时上升沿/下降沿触发自动执行的操作
从模式则是设置定时器输入时上升沿/下降沿触发自动执行的操作
下面我们用到的从模式是复位模式,进入中断定时器的计数器会自动复位清零
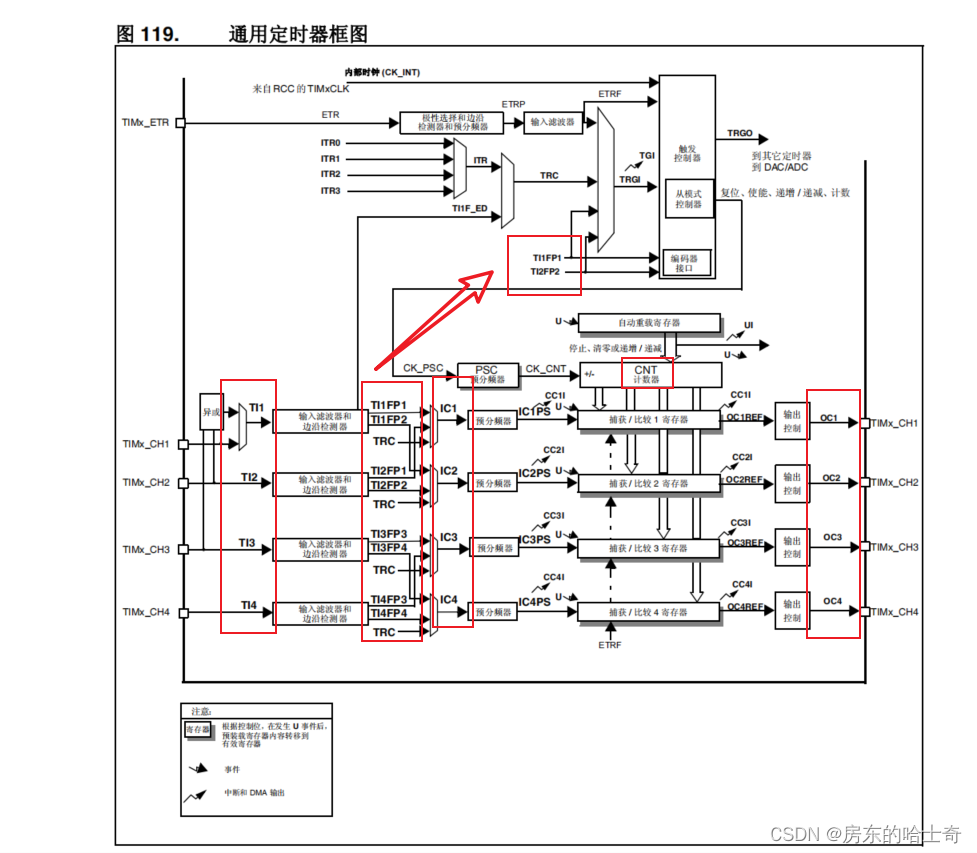
这是定时器运行框图,输入捕获只有看红色框出来的部分就可以了。可能有点抽象,接下来我来翻译一下。
首先是第一框中的TI1代表的是定时器x的通道1GPIO引脚输入的波频,TI2、3、4同理
然后看到是第二个框中第一条通道的TI1FP1和TI1FP2,分别代表的是,TI1这个波频输入哪一个通道处理,TI1FP1则使用定时器通道1的资源对TI1这个波频进行捕获上升沿/下降沿,TI1FP2则使用的是定时器通道2的资源,TI2FP1则代表TI2这个波频使用定时器通道1的资源。
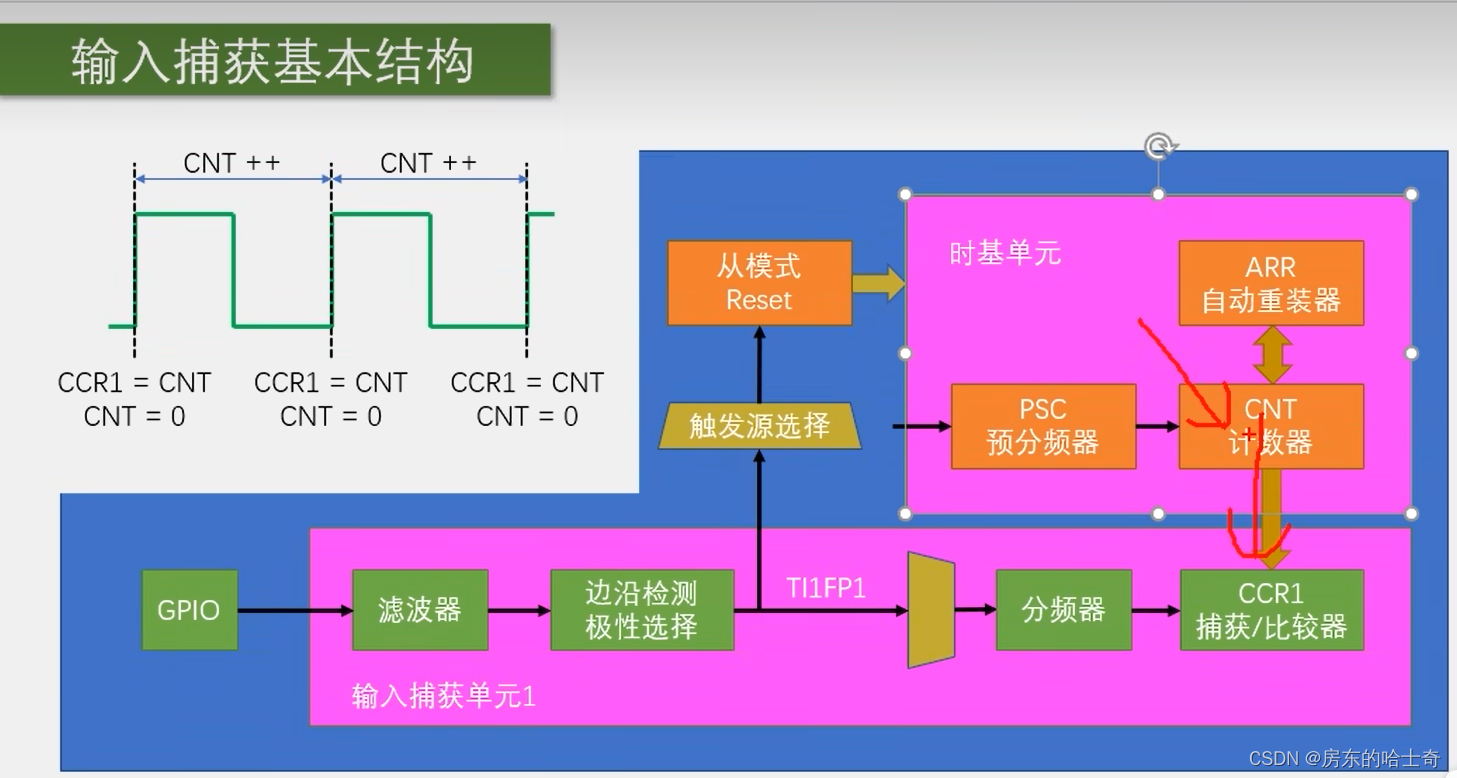
然后就到了处理波频的步骤了,在我们第一个上升沿到来时,定时器的CNT寄存器开始计时,然后下一个上升沿到来,CNT里的值传入CCR输入/比较寄存器,接下来从模式将CNT寄存器自动清零。我们将CCR里的值取出就可以知道一个周期计时值,通过该值大小知道该波频的频率高低。
整个流程如下图
定时器输入捕获测量占空比(PWMI模式)
上文提到,定时器通道1的引脚输入的波频可以分为TI1FP1和TI2FP2到两个通道的计时器处理,那么我们将一段波频分别给两个定时器通道处理,一个捕获上升沿,一个捕获下降沿,在第二次捕获上升沿的中断进入时,用捕获上升沿的CCR1获取的值减去捕获下降沿的CCR2的值就可以得到高电平的时间,计算即可得到占空比。
如下图所示
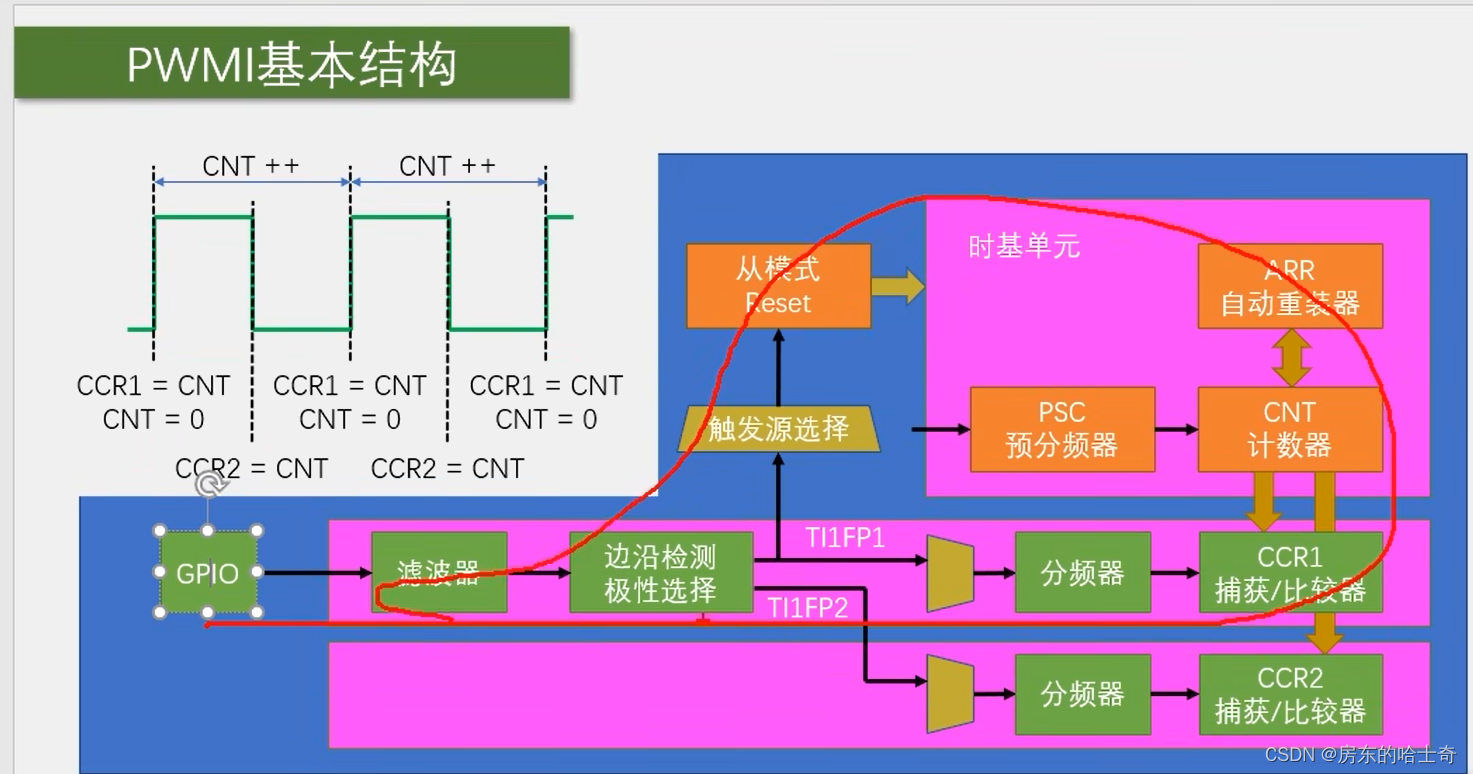
具体步骤:
第一次捕获到上升沿:CNT开始计时
第一次捕获到下降沿:CCR2获取CNT的值,得到高电平时间
第二次捕获到上升沿:CCR1获取CNT的值,进入从模式清除CNT的值,得到周期
那么就可以计算出占空比了。
定时器编码器模式
stm32的定时器拥有编码器模式,使我们可以使用编码器,计算电机转速
AB相编码器
这种编码器可以理解为编码器会输出两个相差90°相位差的波频,而通过A相在前还是B相在前,判断电机正转反转。
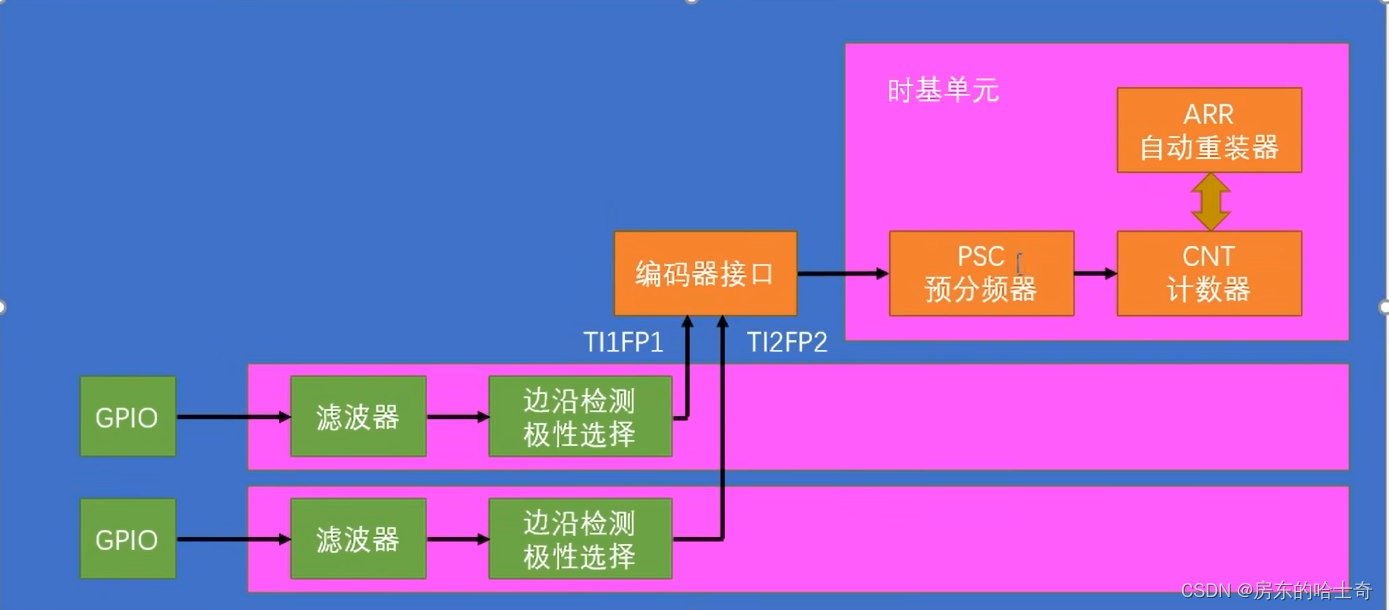
该模式的操作原理比较简单
两波频进入编码器接口后,判断相位差是哪个在前,如果为A相在前就将计数器加1,负责计数器减1。
使用定时器编码模式的软件代码
#include "stm32f10x.h"
#include "hal_TIM.h"
/****************************************************************************
*@*名称 : hal_TIM_Encoder_Config
*@*功能 : 初始化定时器2的编码器模式
*@*形参 : 无
*@*返回值 : 无
****************************************************************************/
static void hal_TIM_Encoder_Config(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIMx, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; //上拉输入
GPIO_InitStructure.GPIO_Pin = TIM_ENCODER_A_PIN | TIM_ENCODER_B_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频因子
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 65536 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 1 - 1; //PSC 预分频器 //使用系统时钟作为定时器的编码器模式的时钟,实现 1 至 65536 分频
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIMx, &TIM_TimeBaseInitStructure);
TIM_ICInitTypeDef TIM_ICInitStructure;
TIM_ICStructInit(&TIM_ICInitStructure); //因为结构体没有定义完整,但担心有不知名错误,先初始化结构体
TIM_ICInitStructure.TIM_Channel = TIM_Channel_1;
TIM_ICInitStructure.TIM_ICFilter = 0xF; //滤波次数7次
TIM_ICInit(TIMx, &TIM_ICInitStructure);
TIM_ICInitStructure.TIM_Channel = TIM_Channel_2;
TIM_ICInitStructure.TIM_ICFilter = 0xF;
TIM_ICInit(TIMx, &TIM_ICInitStructure);
TIM_EncoderInterfaceConfig(TIMx, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);
TIM_Cmd(TIMx, ENABLE);
}
/****************************************************************************
*@*名称 : hal_TIM_Encoder_Init
*@*功能 : 初始化定时器2的编码器模式
*@*形参 : 无
*@*返回值 : 无
****************************************************************************/
void hal_TIM_Encoder_Init(void)
{
hal_TIM_Encoder_Config();
}
/****************************************************************************
*@*名称 : hal_TIM_Encoder_Get
*@*功能 : 获取定时器编码器模式计数的CNT(TIM_EncoderMode_TI12通道12都计数,一个周期记4次)
*@*形参 : 无
*@*返回值 : CNT计数值
****************************************************************************/
int16_t hal_TIM_Encoder_Get(void)
{
int16_t Temp;
Temp = TIM_GetCounter(TIMx);
return Temp;
}














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









