







除了使用CAN以外还有一个叫CANOpen的协议,在CAN的基础上规定了应用层协议,现在被认为在CAN工业系统中占领导地位的标准。在配套PDF和配套的历程是没有把这一块放进去的
CAN总线物理层

CAN是控制器区域网络,德国开发的,现在已经成为了国际标准
主要是应用汽车相关的工业为主

CAN协议与I2C,SPI这些具有时钟信号的同步通讯方式不同。I2C与CSI有片选信号来确定是哪一个I2C或者SPI通讯的设备来使用(外设来使用I2C,SPI)的。CAN是没有这个概念的,它是用ID来确认要使用哪一个CAN设备。
它是一种异步通信,自具有CAN-High(高)与CAN-Low(低)两根信号线。共同组成差分线以差分的形式进行通讯。
物理层可分为闭环总线与开环总线两种,一个适合高速通讯一个是远距离通讯。高速通讯它的距离会短一些,远距离通讯它的速度会慢一些。
闭环总线网络

开环总线网络

通讯节点

节点与节点之间用CAN总线进行连接
CAN通讯协议不会对于每个节点进行地址编码的,它只对于数据内容进行编码。所以网络上的节点理论上是不受限制的,但实际上还是有限制的,只要总线的负载足够,那么你总线的数量就可以一直加一直加。我们可以通过中继器来把负载进行增强。
CAN通讯节点由一个CAN控制器和一个CAN收发器组成。控制器与收发器之间通过CAN_Tx与CAN_Rx信号线相连。收发器与总线之间为使用一个CAN_High与CAN_Low两个信号线相连
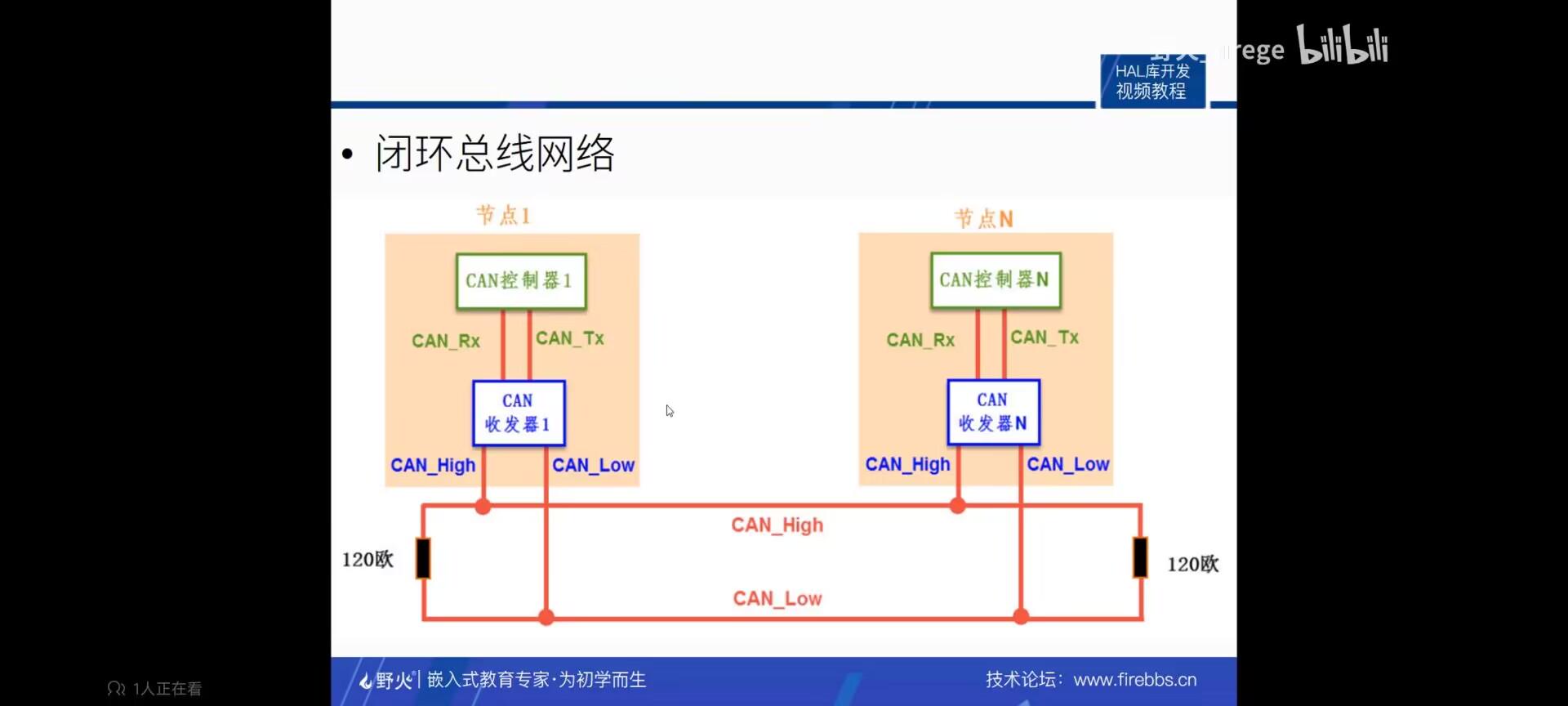
当CAN节点需要发送数据的时候,控制器会把要发送的二进制编码,通过CAN_Tx发送到收发器,然后由收发器把这个普通的逻辑电平(TTL电平)转换为差分信号,通常差分线(CAN_High与CAN_Low)输出到CAN总线网络。然后CAN收发器接收总线的数据到收发器时,它是一个相反的过程
收发器会把收到的CAN_High与CAN_Low的信号转为逻辑电平(TTL电平),然后通CAN_Rx输出到控制器中。对于实验来说STM32的CAN外设就是通讯节点中的控制器。收发器的型号是tgla1050芯片
差分信号

差分信号又可以称为差模信号,与我们传统使用单根信号线来表示逻辑的正负是有区别的。差分信号传输是需要两跟数据线的,
这两根线的增幅相等,相位相反。然后通过两根线的电压值来表示逻辑0或者逻辑1。
差分信号传输的优点

缺点使用了两根线
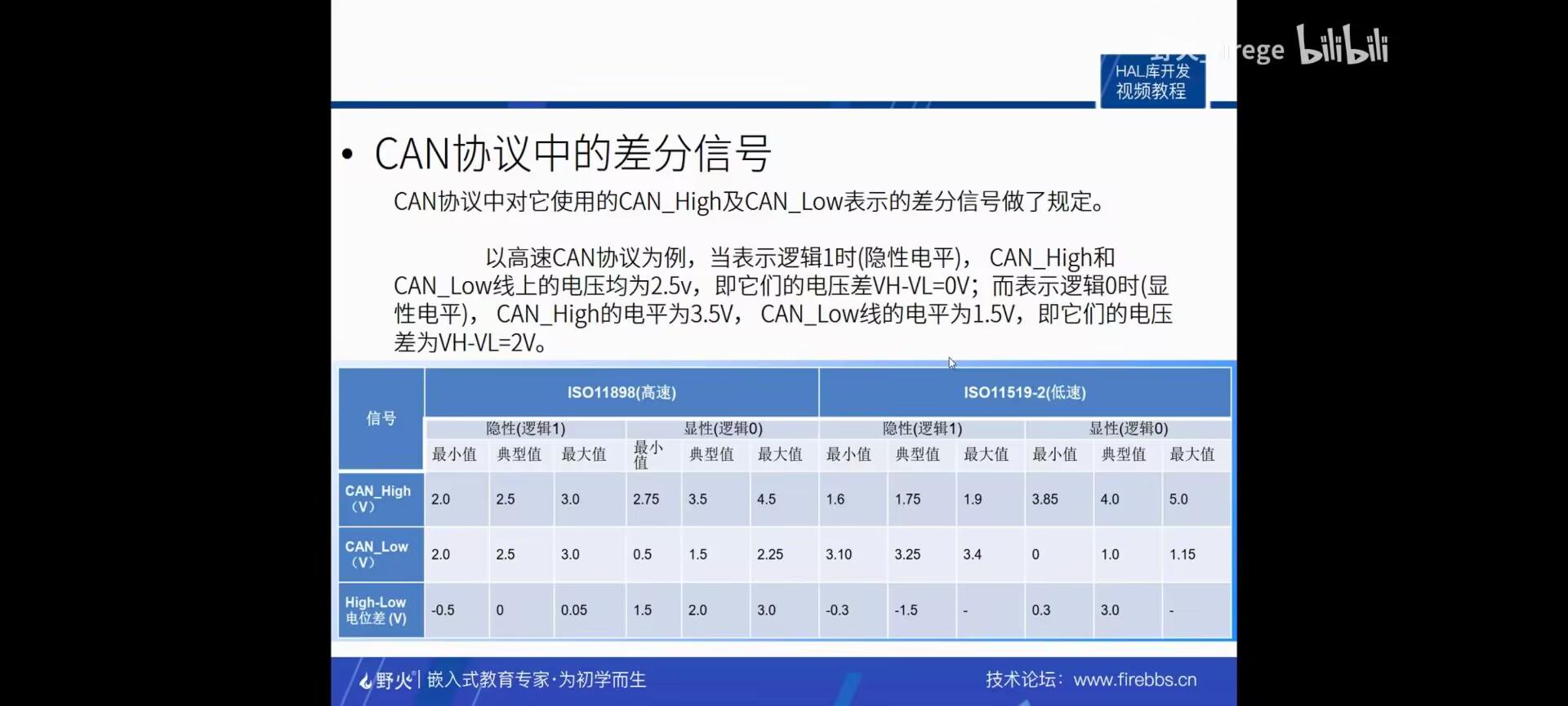
CAN协议中的差分信号

显性电平与隐形电平
主要是高速的,在CAN总线中必须使差分信号处于隐形电平逻辑1(参考:CAN总线的显性电平与隐性电平,CAN总线电平(隐性与显性))。如果有两个CAN通讯节点的话,在同一时间,一个输出隐形电平1,一个输出显性电平0,根据线与的逻辑将使它处于显性电平。显性电平的名字就这样来了。可以认为显性就是优先的意思
CAN总线的物理层只有一对差分线,在一个时刻只能表示一个信号。所以对通讯节点来说CAN通讯,总是半双工的,收发是同时分时进行的。因为它们是共用总线,在同一个时刻只有一个通讯节点发送信号,其他节点只能做接收。以上是物理层















 9601
9601











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











