







上一篇文章教大家如何搭建宇树机器狗go2的仿真环境(古月居 - ROS机器人知识分享社区),而这次我们就来教大家如何在gazebo仿真环境当中添加雷达、深度相机、单目相机等传感器(有简易版和精细版)。宇树机器狗go2仿真会作为一个长期项目来进行不定期更新,仿真不只限于在gazebo上实现,后面还会在isaac sim等仿真平台上教大家如何搭建,其目的还是帮助各位都能以较低的成本加入到宇树机器狗go2的学习中。gazebo的仿真对电脑的需求会低于isaac sim等仿真平台,这对实验条件要求会低很多,更很适合学校小实验室或个人进行仿真实验。
其最终的效果哦图如下:
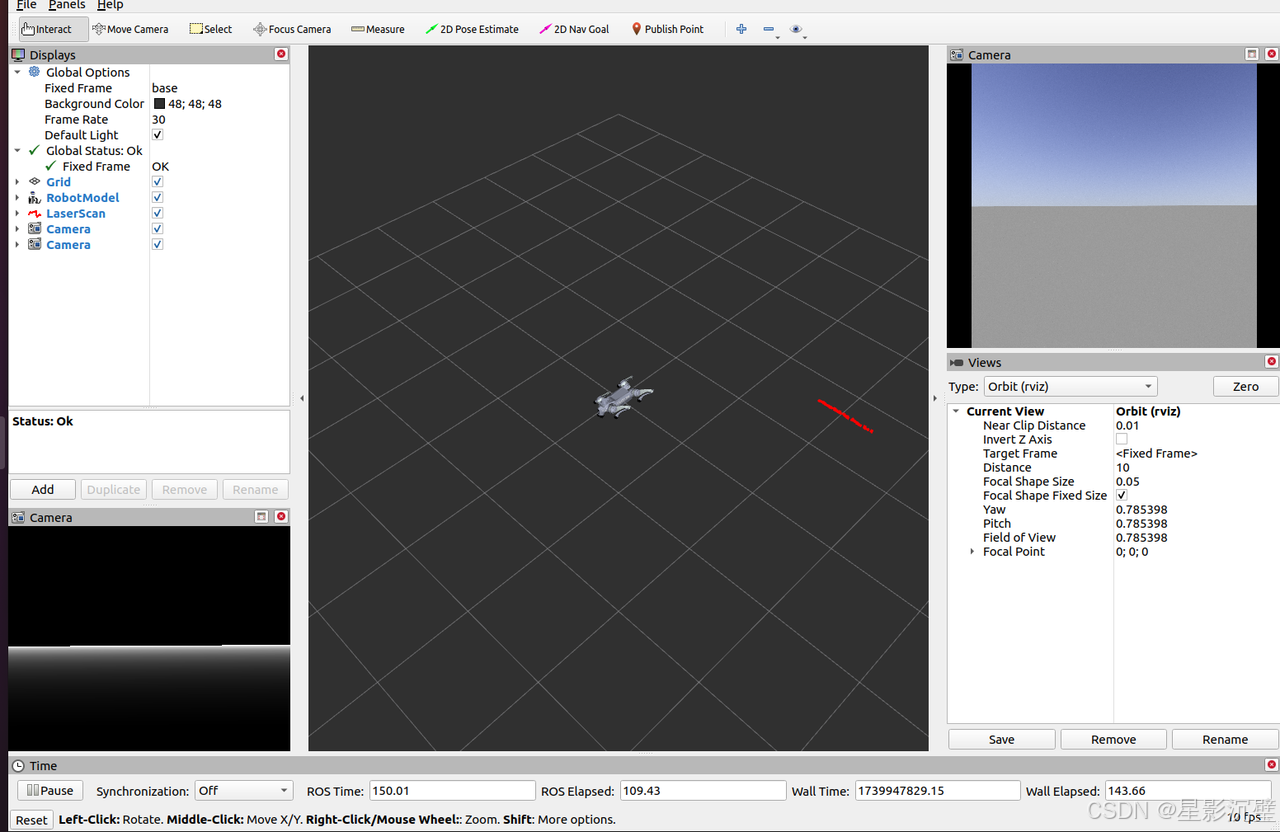
完整版在我的古月居账号中:古月居 - ROS机器人知识分享社区


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









