









目录
0.前言
上一个教程中我们下载好了Isaac Sim,这一章我们将来简单了解一下Isaac Sim平台。
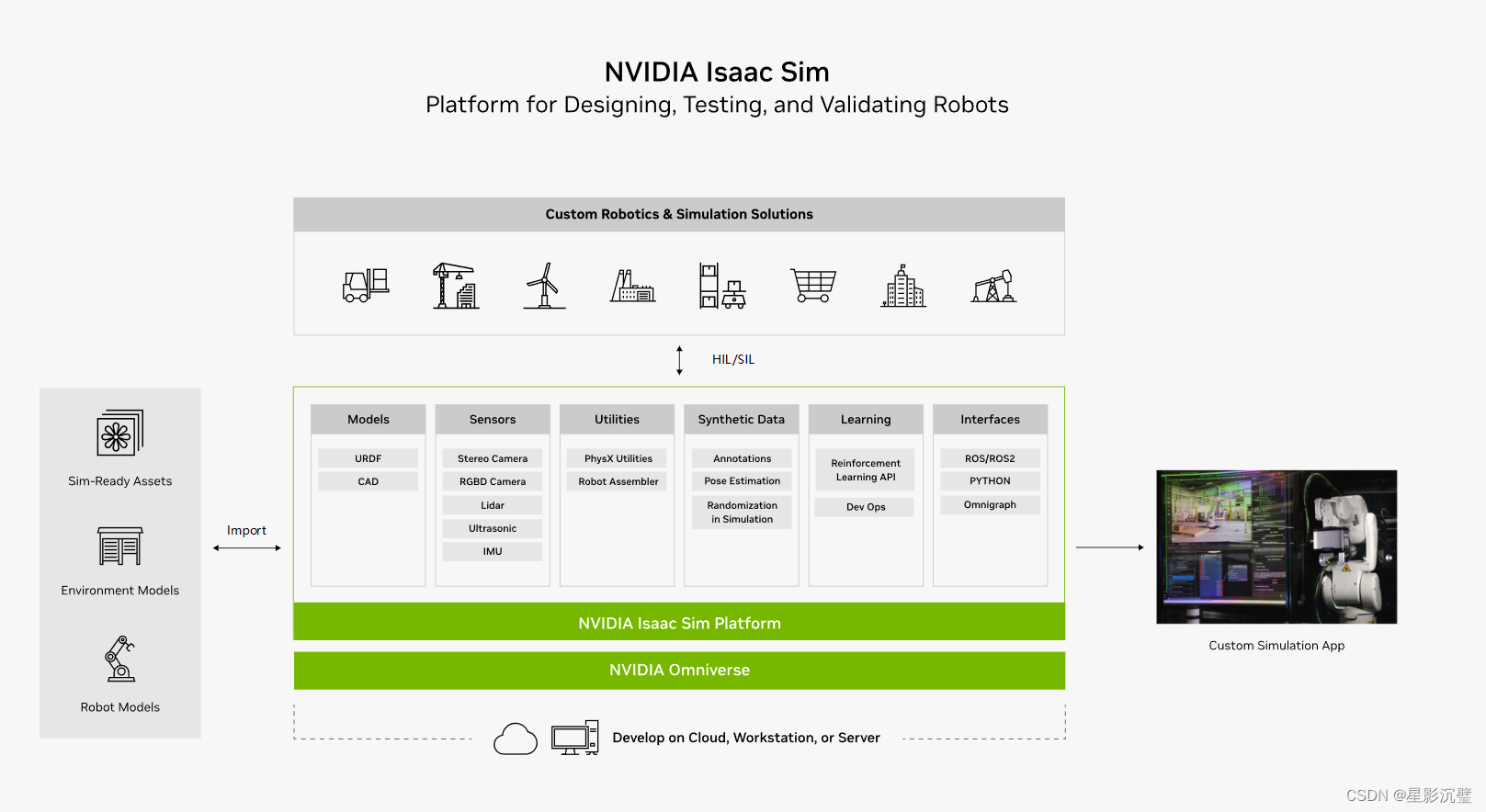
1.Isaac Sim是啥?
What Is Isaac Sim? — Omniverse IsaacSim latest documentation
Isaac Sim是NVDIA Omniverse平台的机器人仿真功能包,在今年的NVDIA GTC大会上皮衣刀客黄专门介绍了Isaac Sim,可见其在NVDIA战略布局上的重要性。Isaac Sim可构建虚拟机器人和世界模型(我大胆预测一波,接下来能用于模拟训练的物理引擎或各家游戏引擎将十分抢手)。Isaac Sim可使用ROS和ROS2来进行机器人操作。也可以模拟各种传感器数据(RGB-D、激光雷达和IMU等)来进行各种操作。
1.Isaac Sim的架构
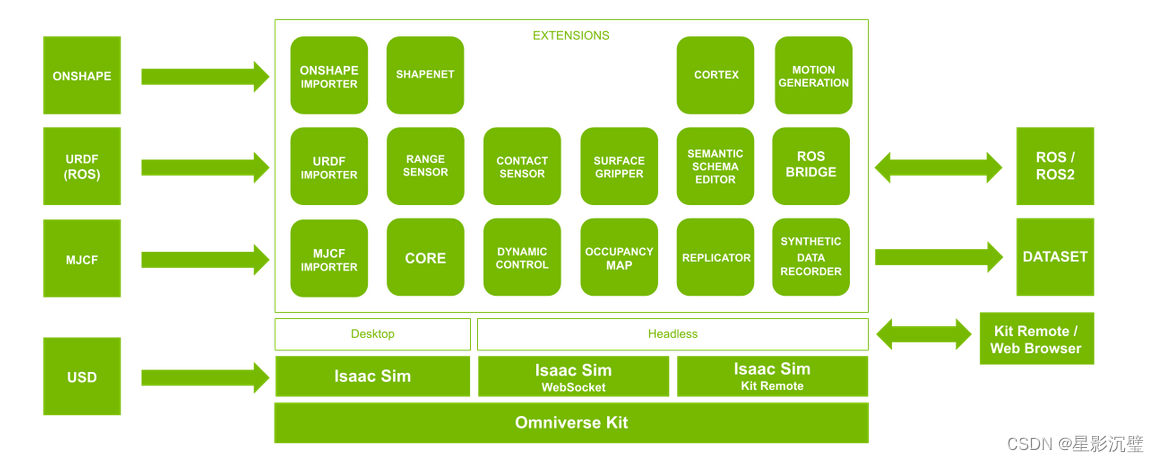
1.Omniverse Kit
概述 — kit-manual 105.1 文档 (nvidia.com)
用于构建原生Omniverse应用程序和微服务的工具包
2.USD
USD Home — Universal Scene 描述 24.05 文档 (openusd.org)
OpenUSD是由皮克斯动画公司(Pixar Animation Studio)制定的通用场景描述(USD)格式。是一个高性能可扩展的软件平台,用于协作构建动画 3D 场景,旨在满足需求大型电影和视觉效果制作,而在这里我们可理解为构建虚拟现实的一种场景构建技术,是一个行业标准。
2.Isaac Sim的开发流程
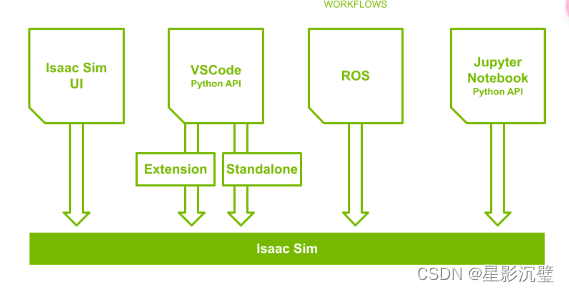
这里我给出一张图,以后有机会会详细讲。
2.Isaac Sim接口
咱来简单玩一下。
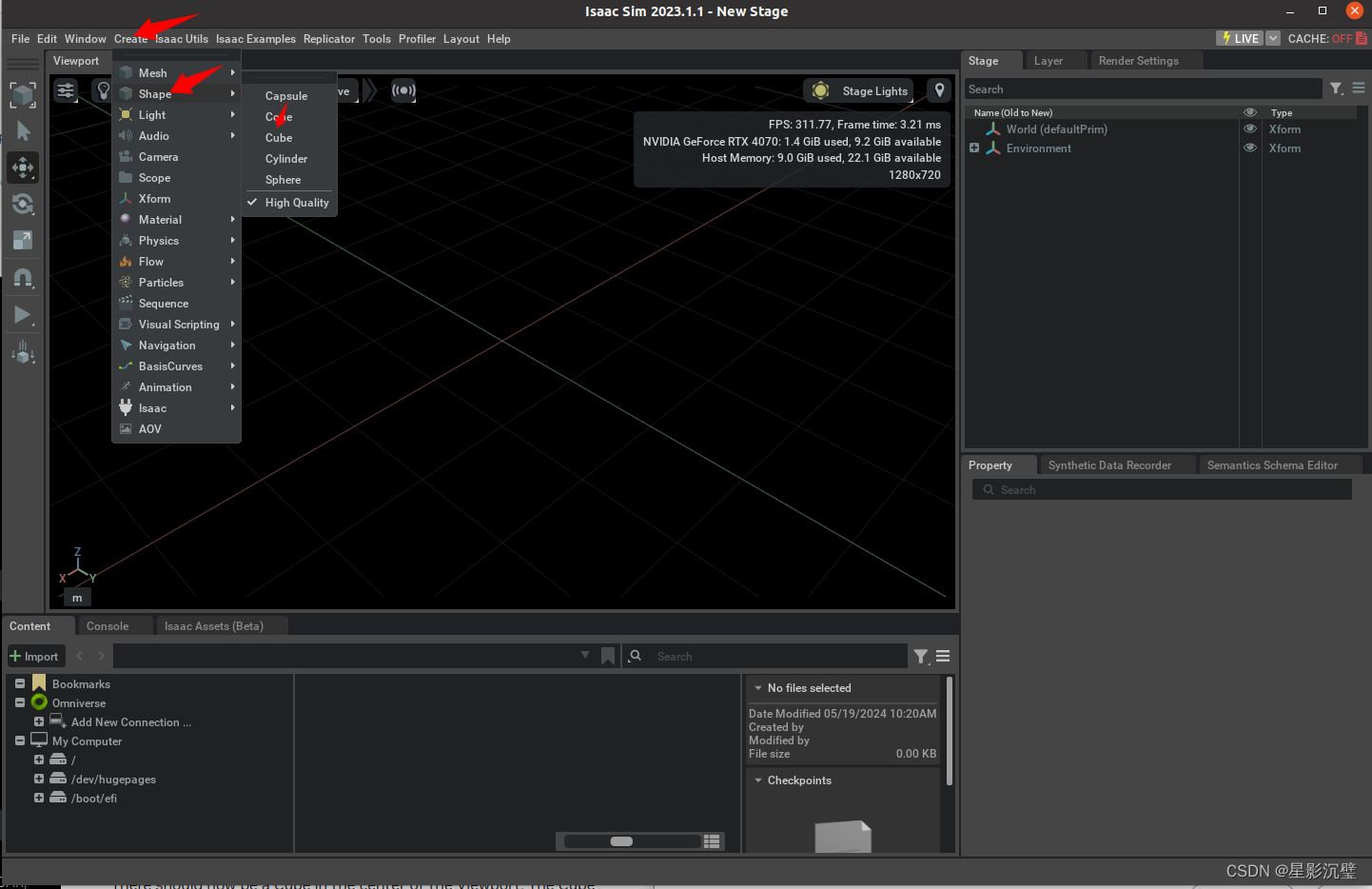
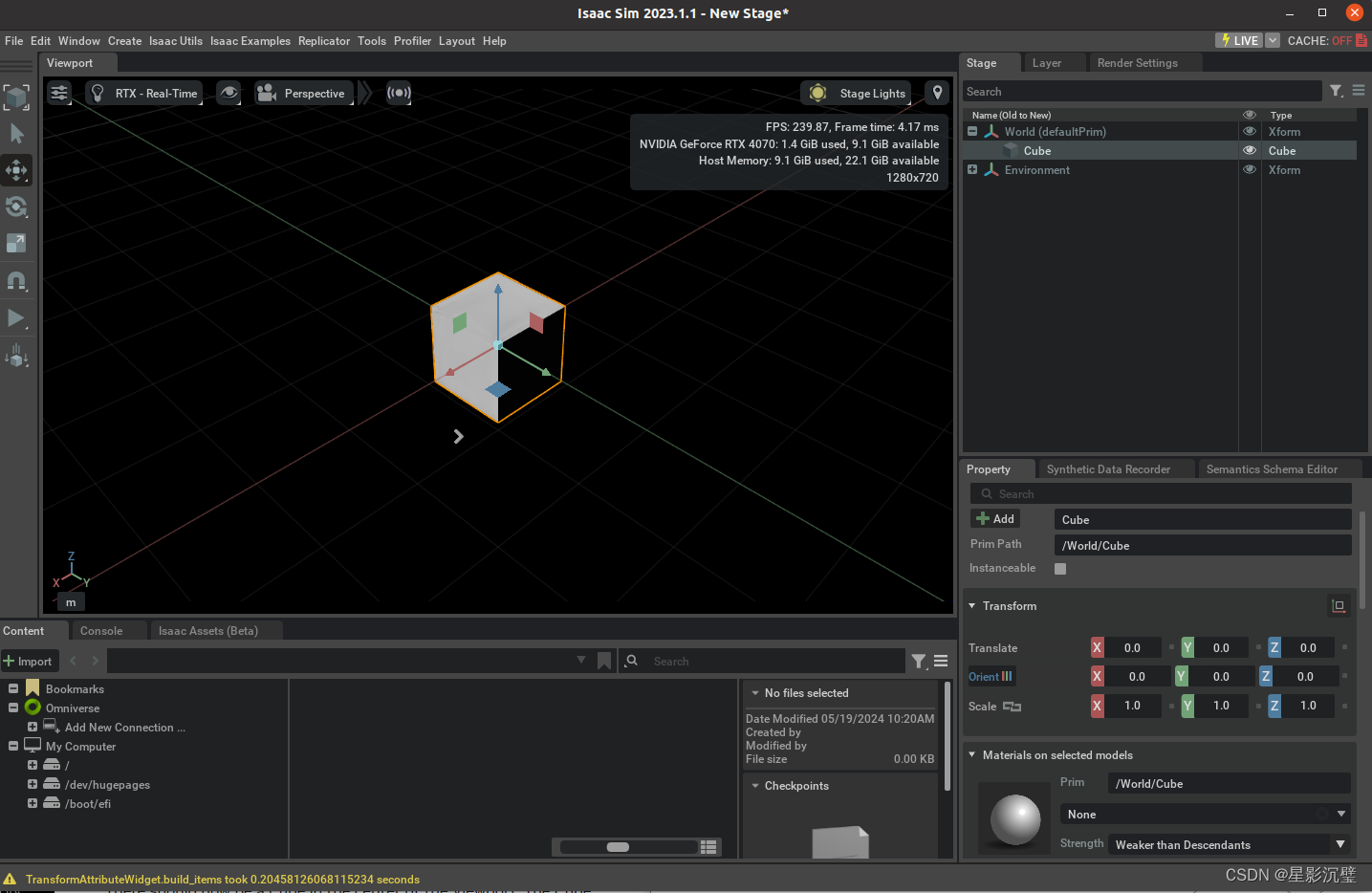
1.咱们先随意建一个立体模型
Create-->Shapes-->Cube(其他模型也行)
1.移动指令(W)
按下按键W是启动,注意当按键呈橙色是使用的是本地坐标系,白色是世界坐标系。
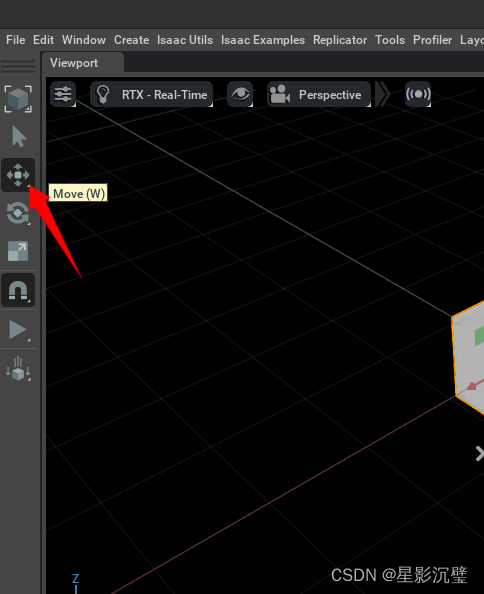
这时可以控制模型的3维运动了,使用鼠标只能以每单位来进行移动。
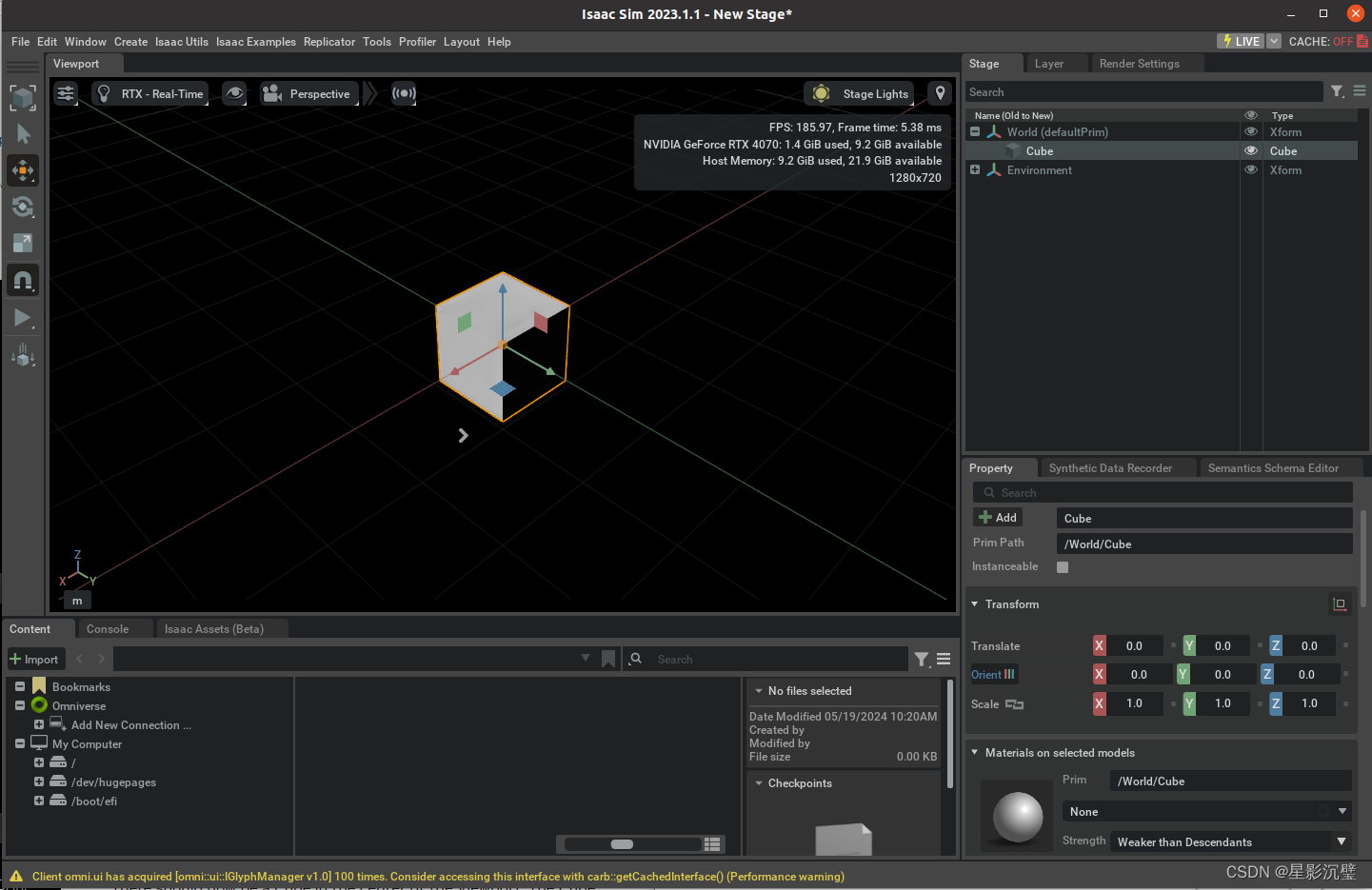
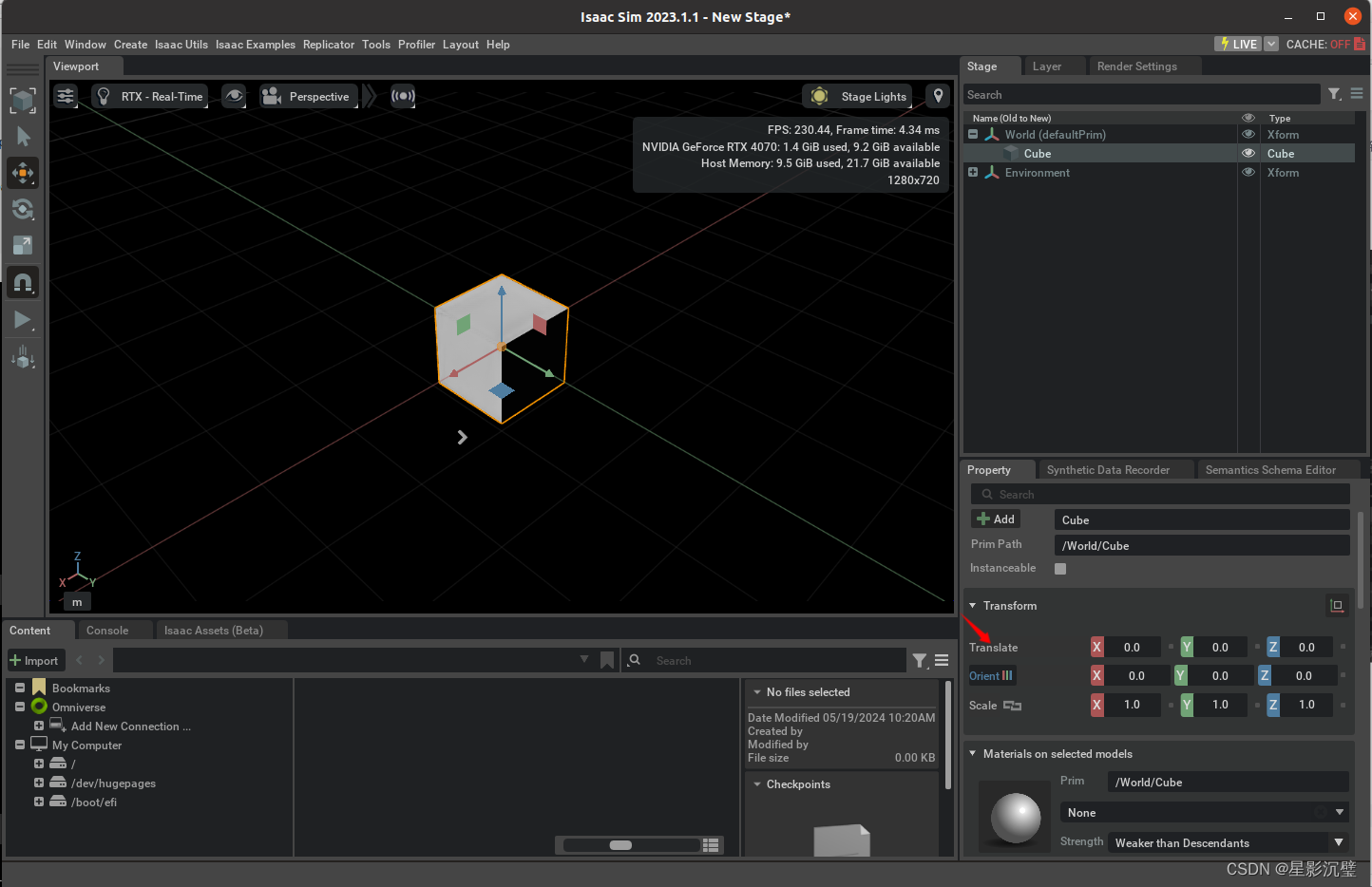
在右下角的转换框的Translate可以精准控制模型的移动
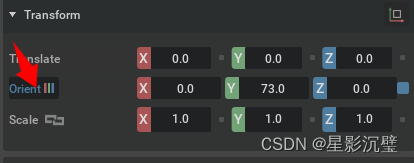
2.旋转指令(E)
按下按键E是启动,注意当按键呈橙色是使用的是本地坐标系,白色是世界坐标系。
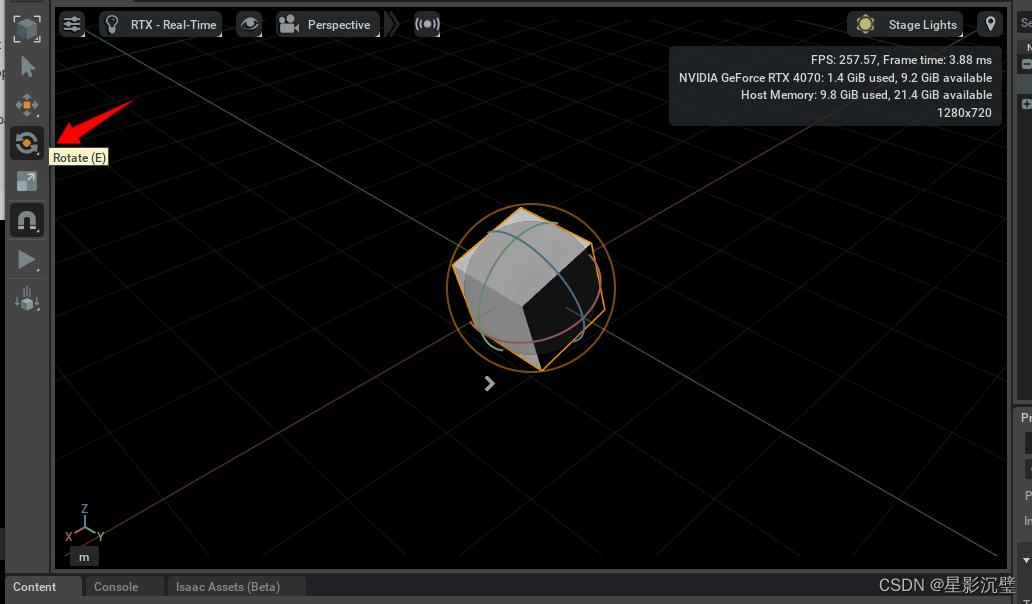
这时可以控制模型的3维旋转了,使用鼠标只能以每单位来进行旋转。
在右下角的转换框的Orient可以精准控制模型的旋转
3.形变(R)
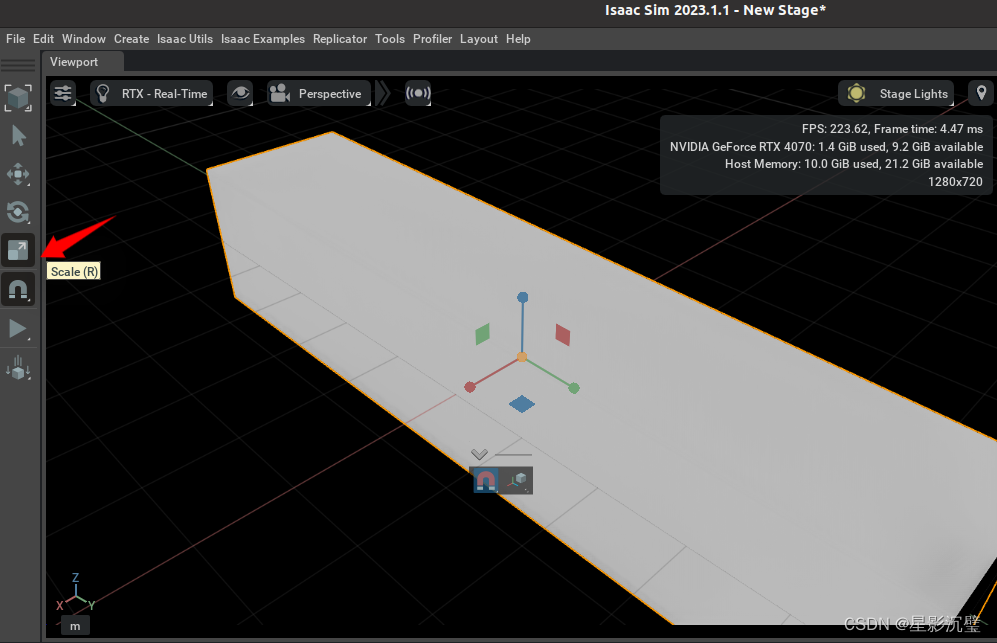
和上面两个是一样的,但这里没有坐标系变换关系了。
4.相机聚焦(F)
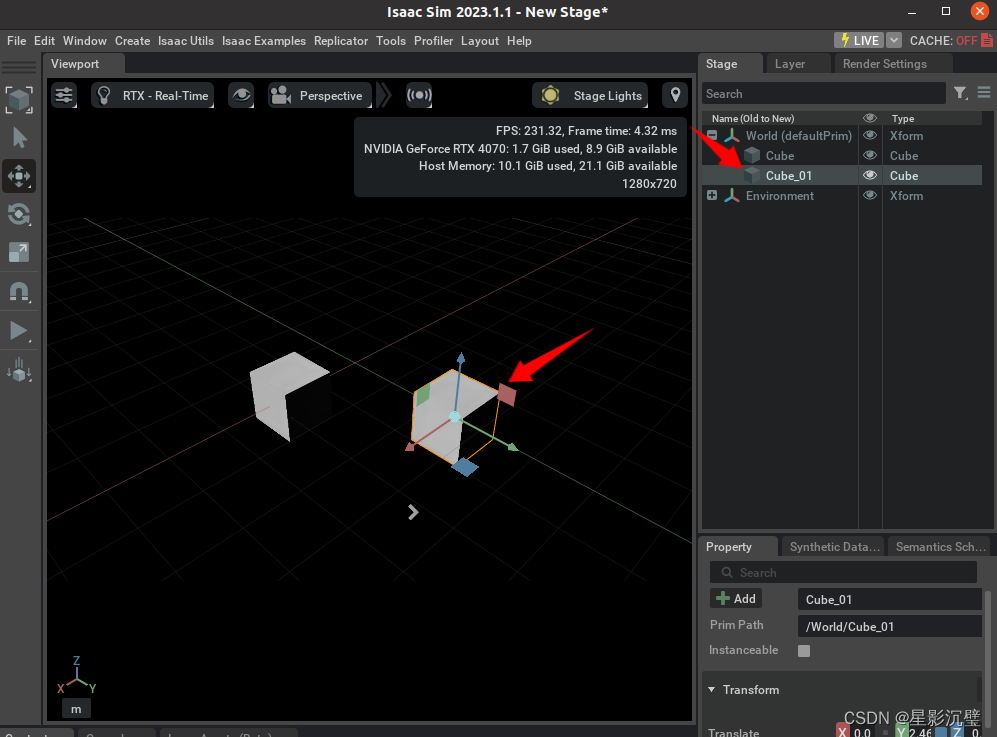
相机聚焦是帮我们快速聚焦主题,首先创建新物体。
直接点击物体或右上角stage的物体名称后按下F会锁焦。
5.相机视角变换(ALT+鼠标)
当ALT和鼠标结合在一起是可以对相机的视角进行转换(运镜)。这里我就不演示了。
3.后记
本次算是我简单的尝试了以下isaac sim,也没有干活只是简单记录,未来的某个时间我可能会好好的更新一下这个系列。

















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









