




 本文详细介绍了Gazebo仿真软件的界面构成,包括场景界面、面板功能(左面板、右面板和顶部工具栏)、获取模型的方法(下载和添加)以及创建和编辑场景的过程。
本文详细介绍了Gazebo仿真软件的界面构成,包括场景界面、面板功能(左面板、右面板和顶部工具栏)、获取模型的方法(下载和添加)以及创建和编辑场景的过程。
1.打开gazebo
gazebo
2.gazebo界面简介
打开gazebo后的整个界面就是长这样的
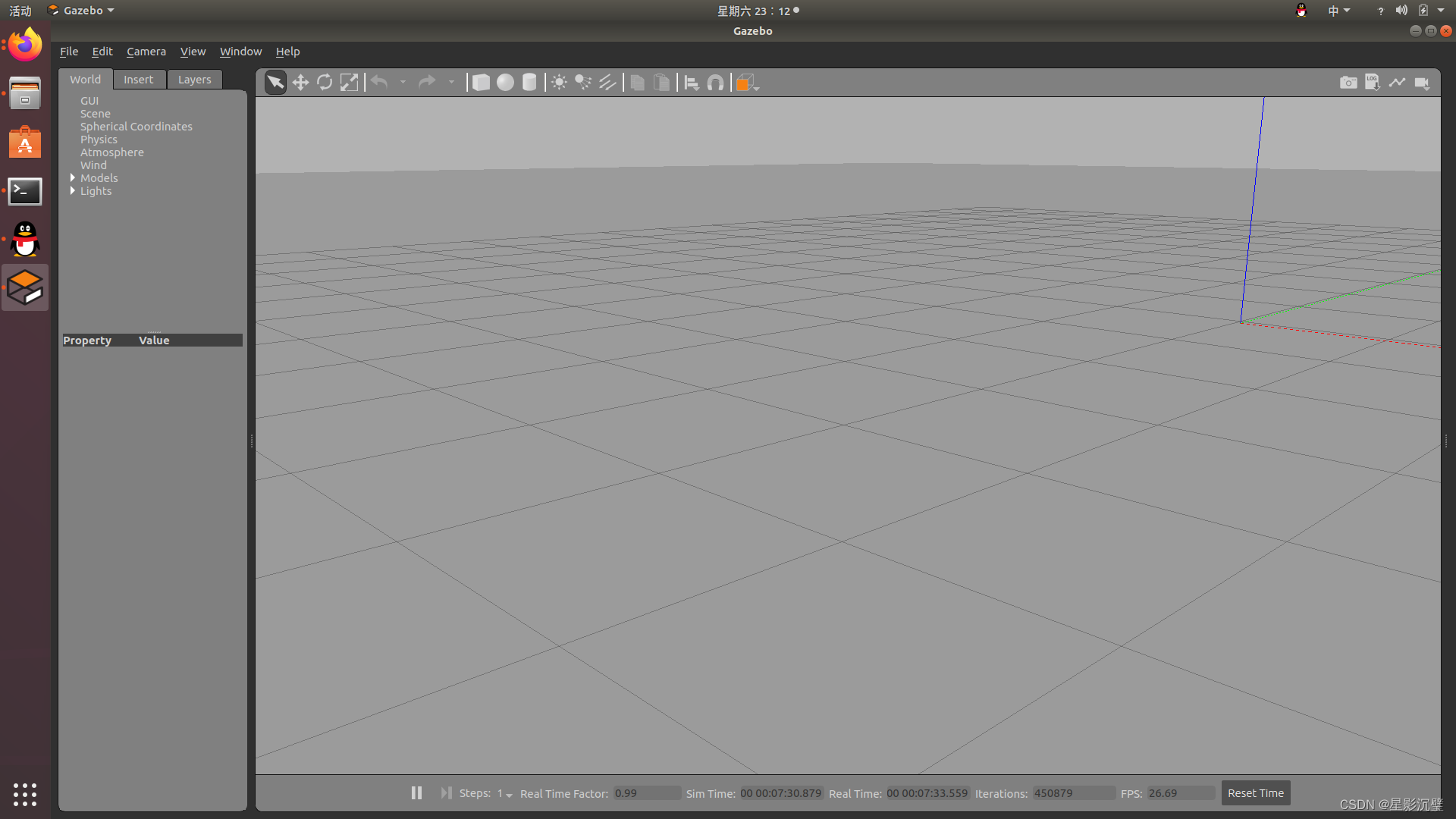
1. 场景界面(主显示区)
主显示区是gazebo仿真的主要部分,在这个位置显示我们的机器人模型等,我们在这个区域操控我们的仿真对象,并与地形环境进行交互。(在场景中点击鼠标左键可以进行视角移动,点击右键可以进行视角缩放,中键可以转动视角)
2.面板
1)左面板
启动gazebo时默认出现左面板
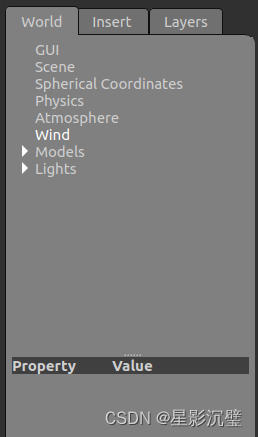
a.World:该选项卡显示当前场景中的模型,允许查看和修改模型参数(姿态调整),也可以通过展开“GUI”选项调整视角
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1696
1696

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









