import numpy as np
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['Microsoft YaHei']
plt.rcParams['axes.unicode_minus'] = False
plt.rcParams['font.sans-serif'] = ['SimHei']
# 参数
c1 = -4.695
c2 = 10.735
c3 = -1.8207
c4 = 0.2623
c5 = -1.274
c6 = -0.102
v = 25 # 鱼雷匀速运动速度
vm = -5 # 目标匀速运动速度
xm0 = 1500
zm0 = 1500
beta0 = 0 # 初始角度
omega0 = 0 # 初始角速度
delta0 = 0 # 初始角加速度
psit0 = 0 # 初始航向角
Psit0 = 0 # 初始目标航向角
x0 = 0 # 初始x坐标
z0 = 0 # 初始z坐标
Psim0 = 0 # 初始目标航向角
k = 0.5
# 时间步长和模拟时间
dt = 0.01
simulation_time =100
# 初始化变量
t = 0
x = x0
z = z0
beta = beta0
omega = omega0
delta = delta0
psit = psit0
Psit = Psit0
Psim = Psim0
# 存储轨迹数据
x_vals = []
z_vals = []
psit_vals = []
# 定义函数
def q(xm, zm, x, z):
return np.arctan2(zm - z, xm - x)
def runge_kutta_step(xm, zm, x, z, beta, omega, delta, psit, Psit, Psim, dt):
q_val = q(xm, zm, x, z)
psi_t = omega
Psi_t = psi_t - beta
eta_val = q_val - Psi_t
delta = k * eta_val
dw_dt = c1 * omega + c2 * beta + c3 * delta
dbeta_dt = c4 * omega + c5 * beta + c6 * delta
Psit = psi_t - beta - (1 - c4) * q_val - c5 * beta - c6 * delta
dx_dt = v * np.cos(Psit)
dz_dt = -v * np.sin(Psit)
x += dx_dt * dt
z += dz_dt * dt
beta += dbeta_dt * dt
omega += dw_dt * dt
psit += omega * dt
return x, z, beta, omega, psit, Psit
while t < simulation_time:
# 调用龙格库塔法进行一步计算
x, z, beta, omega, psit, Psit = runge_kutta_step(xm0, zm0, x, z, beta, omega, delta, psit, Psit, Psim, dt)
x_vals.append(x)
z_vals.append(z)
psit_vals.append(psit)
t += dt
print("时间: {:.2f}, 位置: ({:.2f}, {:.2f}), 方向: {:.2f}".format(t, x, z, psit))
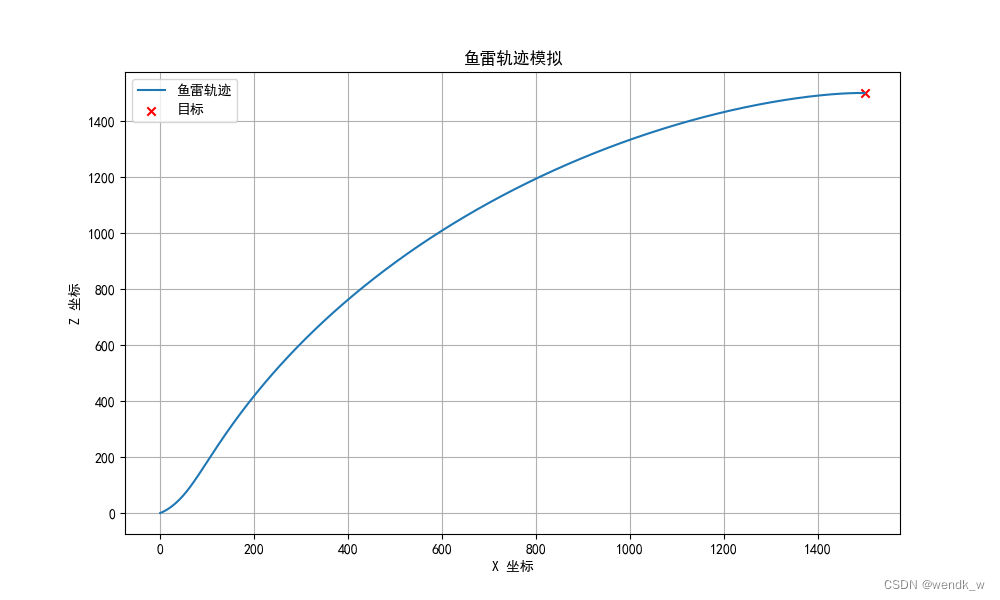
# 可视化
plt.figure(figsize=(10, 6))
plt.plot(x_vals, z_vals, label='鱼雷轨迹')
plt.scatter([xm0], [zm0], color='red', label='目标', marker='x')
plt.xlabel('X 坐标')
plt.ylabel('Z 坐标')
plt.title('鱼雷轨迹模拟')
plt.legend()
plt.grid()
plt.show()






















 3829
3829

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









