







本文主要讲述如何在Linux下使用python进行简单的CANopen通信,使用了一个叫CANopen for Python的库,地址是https://github.com/christiansandberg/canopen
该库作者还写了相关的教程,地址是https://canopen.readthedocs.io/en/latest/,可以直接去看这个教程,只是这个教程是英文的,不过也不难。
一 安装CANopen for Python
要求python版本是2.7或者3.4以上,推荐使用3.4以上的版本。这里使用virtualenv去安装这个库(也可以直接使用pip3去安装,即pip3 install canopen),所以先安装virtualenv,
pip3 install virtualenv
如果速度太慢,可以指定国内镜像去安装,
pip3 install virtualenv -i https://mirrors.aliyun.com/pypi/simple/
安装好之后,我们创建一个目录叫pythonCANopen,然后进入这个目录执行virtualenv venv,

OK之后,使用下面命令去激活这个虚拟环境,
source venv/bin/activate
这样在目录左侧就会有个venv符号,

如果想退出虚拟环境,只要输入deactivate命令就可以了,

使用virtualenv的最大好处就是可以隔离工程应用之间的互相干扰,在虚拟环境下下载的库都只会存放在工程目录下,非常方便。
最后,输入下面命令去安装canopen,也就是本文使用的库,
pip3 install canopen
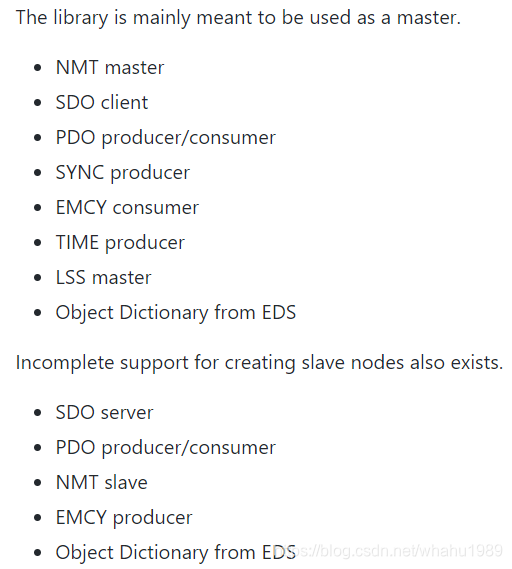
目前,该库已实现如下功能,对于我们学习CANopen已经足够了。
二 创建虚拟CAN设备
操作方式和上一篇文章中是一样的,虚拟CAN设备的名字叫vcan0,类型是socketCAN
$ sudo modprobe vcan
$ sudo ip link add dev vcan0 type vcan
$ sudo ip link set up vcan0
三 编写Python代码
因为需要一个master和一个slave,所以需要2份代码
master.py
import time
import canopen
# 创建一个网络用来表示CAN总线
network = canopen.Network()
# 添加slave节点,其id是6,对象字典为CANopenSocket.eds
node = canopen.RemoteNode(6, 'CANopenSocket.eds')
network.add_node(node)
# 连接到CAN总线
network.connect(bustype='socketcan', channel='vcan0')
# 把slave从INITIALISING设置为PRE-OPERATIONAL状态
node.nmt.state = 'PRE-OPERATIONAL'
# 等待3s
time.sleep(3)
# 把slave从PRE-OPERATIONAL设置为OPERATIONAL状态
node.nmt.state = 'OPERATIONAL'
# 等待5s
time.sleep(5)
# 把slave的心跳报文时间改为5s
node.sdo['Producer heartbeat time'].raw = 5000
slave.py
import signal
import canopen
running = True
def sigint_handler(signum, frame):
global running
print('')
running = False
exit(0)
# 处理按键发送的信号,优雅的关闭程序
signal.signal(signal.SIGINT, sigint_handler)
signal.signal(signal.SIGHUP, sigint_handler)
signal.signal(signal.SIGTERM, sigint_handler)
# 创建一个网络用来表示CAN总线
network = canopen.Network()
# 连接到CAN总线
network.connect(bustype='socketcan', channel='vcan0')
# 创建slave节点,其id是6,对象字典为CANopenSocket.eds
node = network.create_node(6, 'CANopenSocket.eds')
# 向CAN总线上发送启动消息
node.nmt.send_command(0)
# 发送心跳报文,每隔1s发送一次
node.nmt.start_heartbeat(1000) # 1000ms
# 循环
while running:
pass
运行
代码中需要eds文件,即CANopenSocket.eds,可以到这个地址上去复制保存一下就行了。
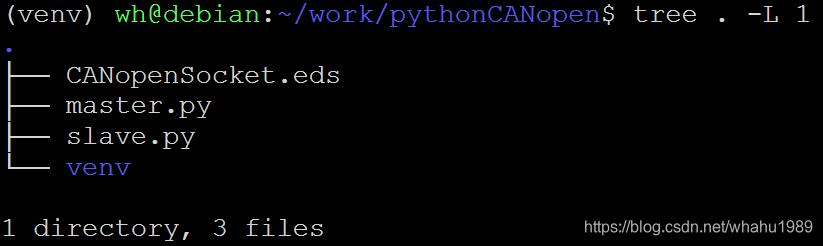
最后整体工程结构如下,
先开一个terminal运行candump -t d vcan0,

然后新开一个terminal运行slave.py,

此时可以在candump终端下可以看到心跳报文,1s一次
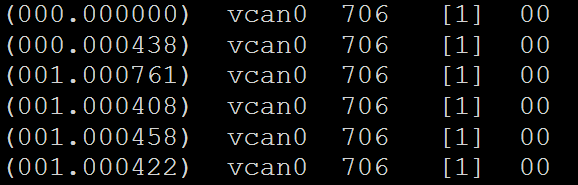
此时slave的状态是INITIALISING
最后新开一个terminal,运行master

报文变化如下,最左一列显示报文间的时间间隔,
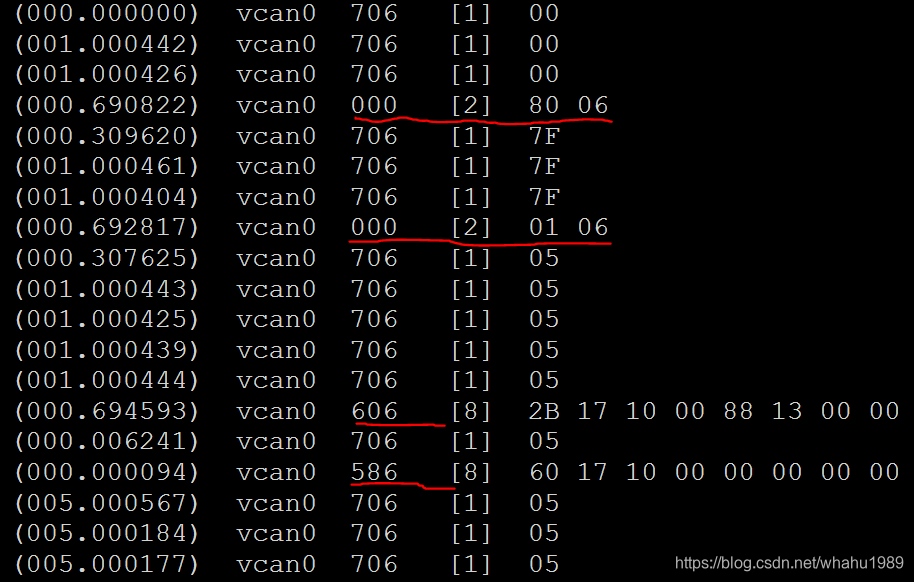
报文解析:
- 第一个红线标记处是master发送NMT命令去把slave状态从INITIALISING变成PRE-OPERATIONAL
- 第二个红线标记处是master发送NMT命令去把slave状态从PRE-OPERATIONAL变成OPERATIONAL
- 第三个红线标记处是master发送SDO报文去修改slave的心跳报文时间间隔,改为5000ms
- 第四个红线标记处是slave对master的SDO应答,表示修改成功,没有错误
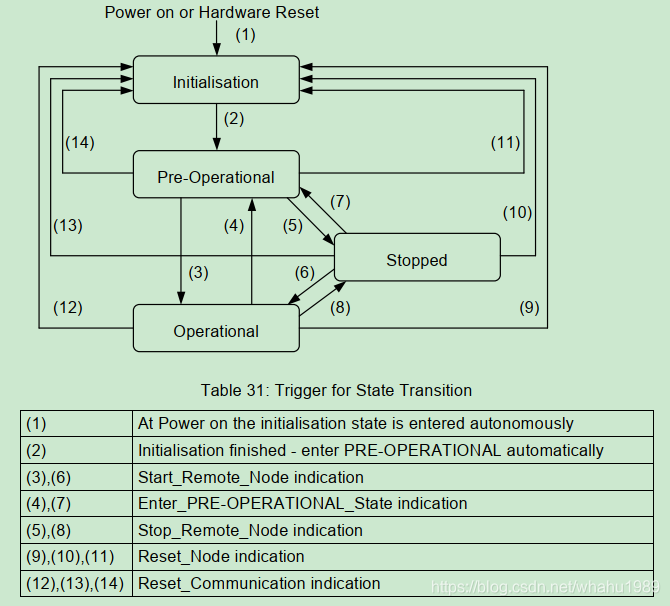
下图是状态转换的状态机,详细资料可以去查看CANopen DS301的文档
四 总结
本文主要讲述如何使用python去进行CANopen通信,使用库CANopen for Python,这个库最大的好处就是可以自己解析eds或dcf文件,非常方便。后续也会使用这个库进行讲解CANopen
本系列的第一篇文章讲述了如何使用库CANopenSocket去进行CANopen通信,但是这个库不支持解析eds文件,需要使用第三方工具去把eds文件转为C代码,然后集成到整体代码里来,这样就会比较麻烦。
如果有写的不对的地方,希望能留言指正,谢谢阅读。

















 813
813

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









