








2022.3.9
∣
∣
x
∣
∣
2
||x||^2
∣∣x∣∣2:
规则1:范式是写再下面的,如果是2常常省略。所以
∣
∣
x
∣
∣
2
=
∣
∣
x
∣
∣
2
2
||x||^2=||x||^2_2
∣∣x∣∣2=∣∣x∣∣22;
规则2:
>
【尝试推导】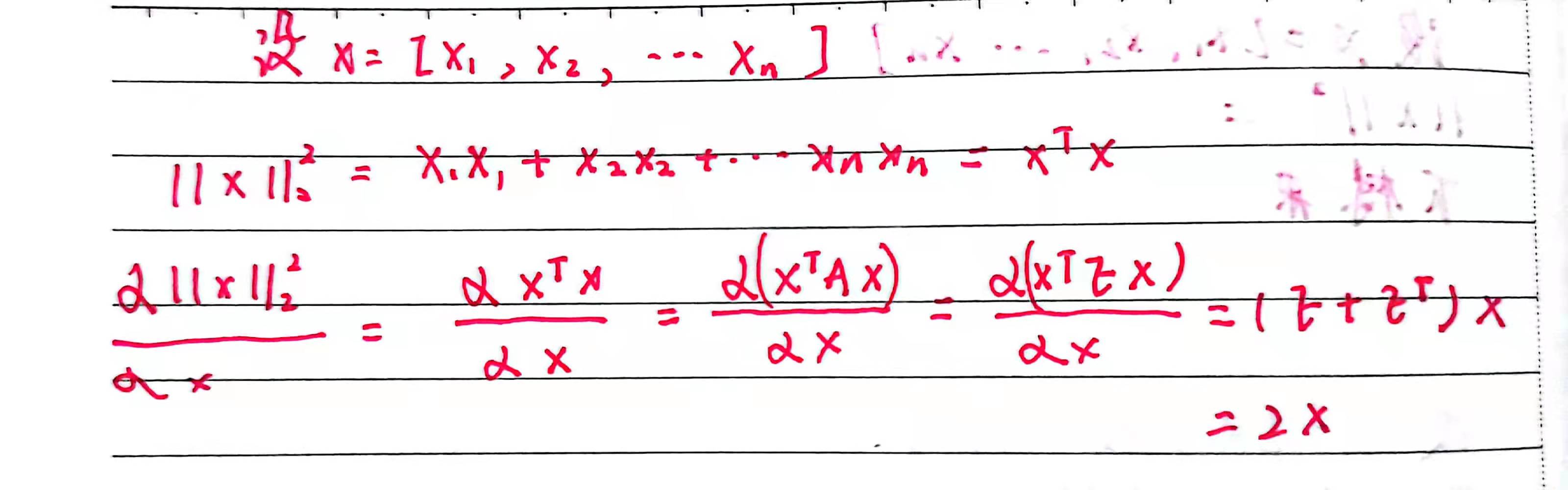


















 3690
3690

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











