







 本文档详细介绍了CANoe中CAN TP层的各种函数,包括发送、接收、错误处理等功能,如CanTp_ErrorInd、CanTp_SendData等,并讨论了如何配置传输层以及相关参数的设置,对于理解CAN TP层在CANoe中的工作原理和应用具有指导意义。
本文档详细介绍了CANoe中CAN TP层的各种函数,包括发送、接收、错误处理等功能,如CanTp_ErrorInd、CanTp_SendData等,并讨论了如何配置传输层以及相关参数的设置,对于理解CAN TP层在CANoe中的工作原理和应用具有指导意义。
如果想使用CAN TP层函数,首先需要在网络节点或测试节点配置页面的Componets组件一栏添加osek_tp.dll文件。路径为:C:\Program Files\Vector CANoe 15\Exec32
至于节点的CAPL程序内需不需要引用这个dll文件,无所谓,可写可不写。但是如果是其他dll,必须在CAPL程序中引用。为什么osek_tp.dll可以添加到节点配置页面,而不必在CAPL中引用?因为节点使用TP层函数发送和接收数据,必须通过传输层,节点配置osek_tp.dll文件相当于配置了传输层
includes
{
#pragma library ("C:\Program Files\Vector CANoe 15\Exec32\osek_tp.dll")
}
注意:在includes结构中引用dll文件和引用can/cin文件,写法有所不同
includes结构中引用can/cin文件:
#include ".\CanMessage.can"
CAPL程序可以通过如下方式查看dll文件里的函数:
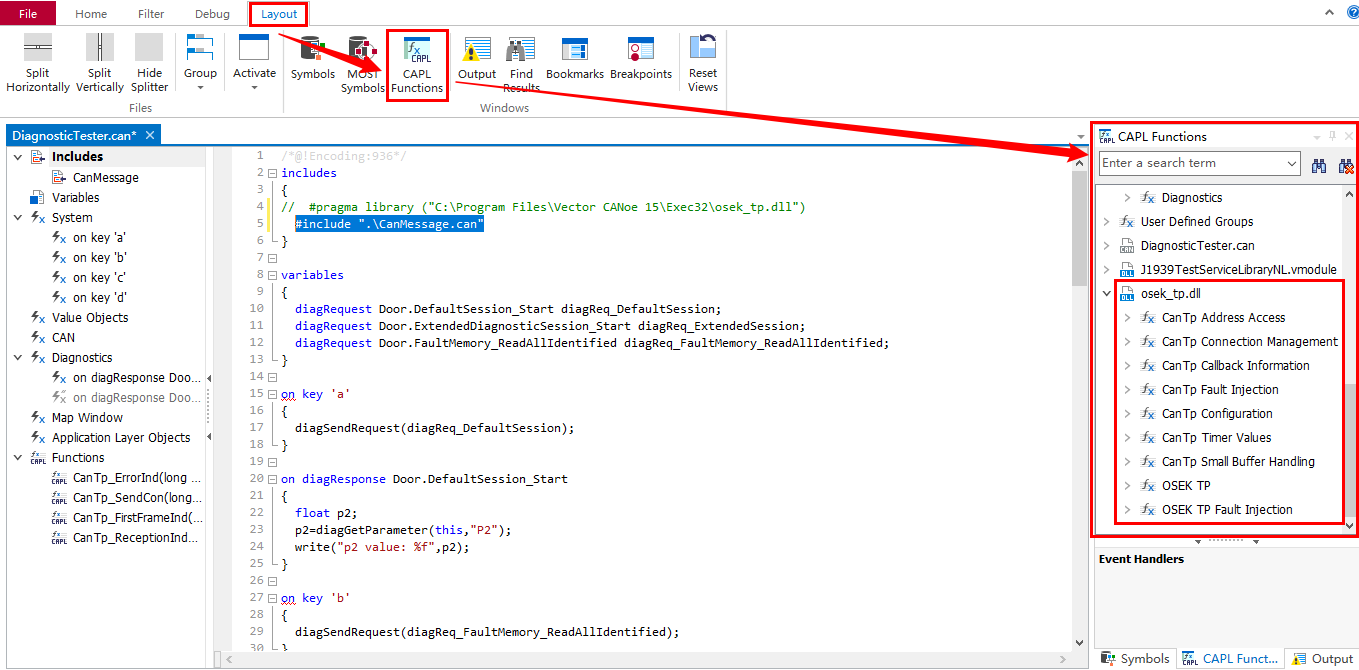
所有函数:
1、CanTp_ErrorInd
回调函数,当TP连接发生错误时调用

 订阅专栏 解锁全文
订阅专栏 解锁全文


















 3683
3683

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











