




本文用于自学,资料均来自网络

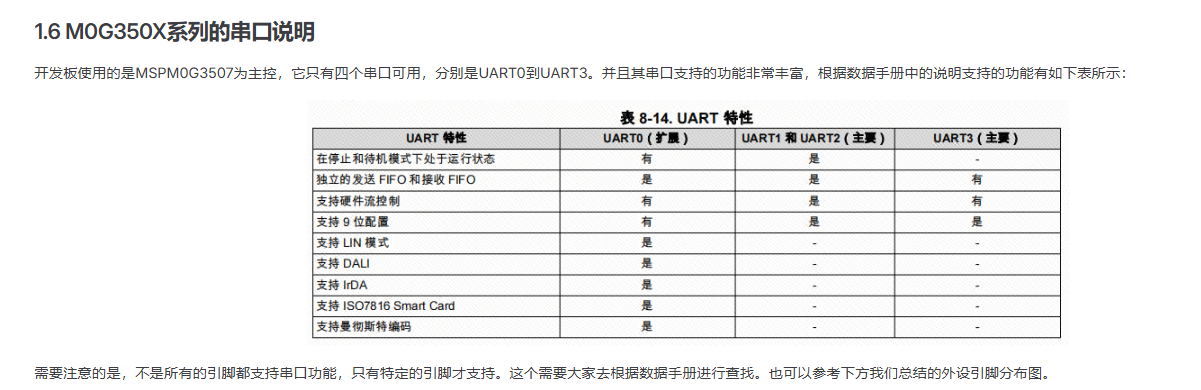
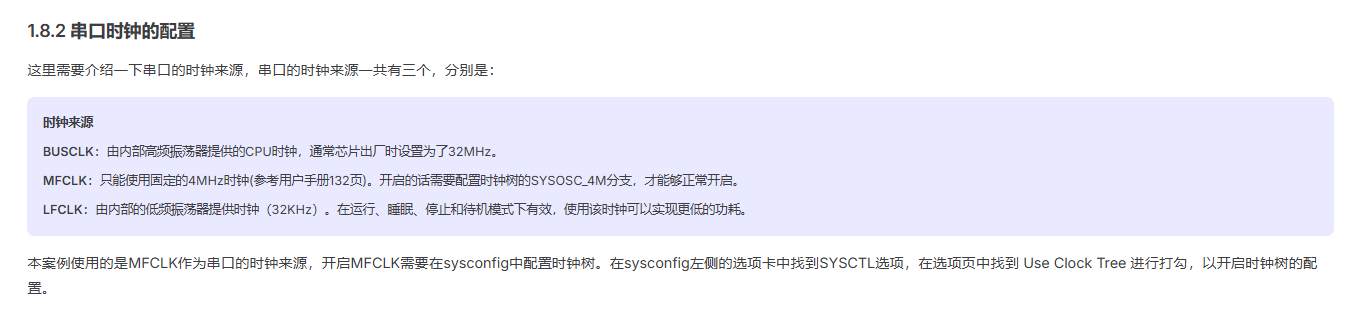
CCS配置:
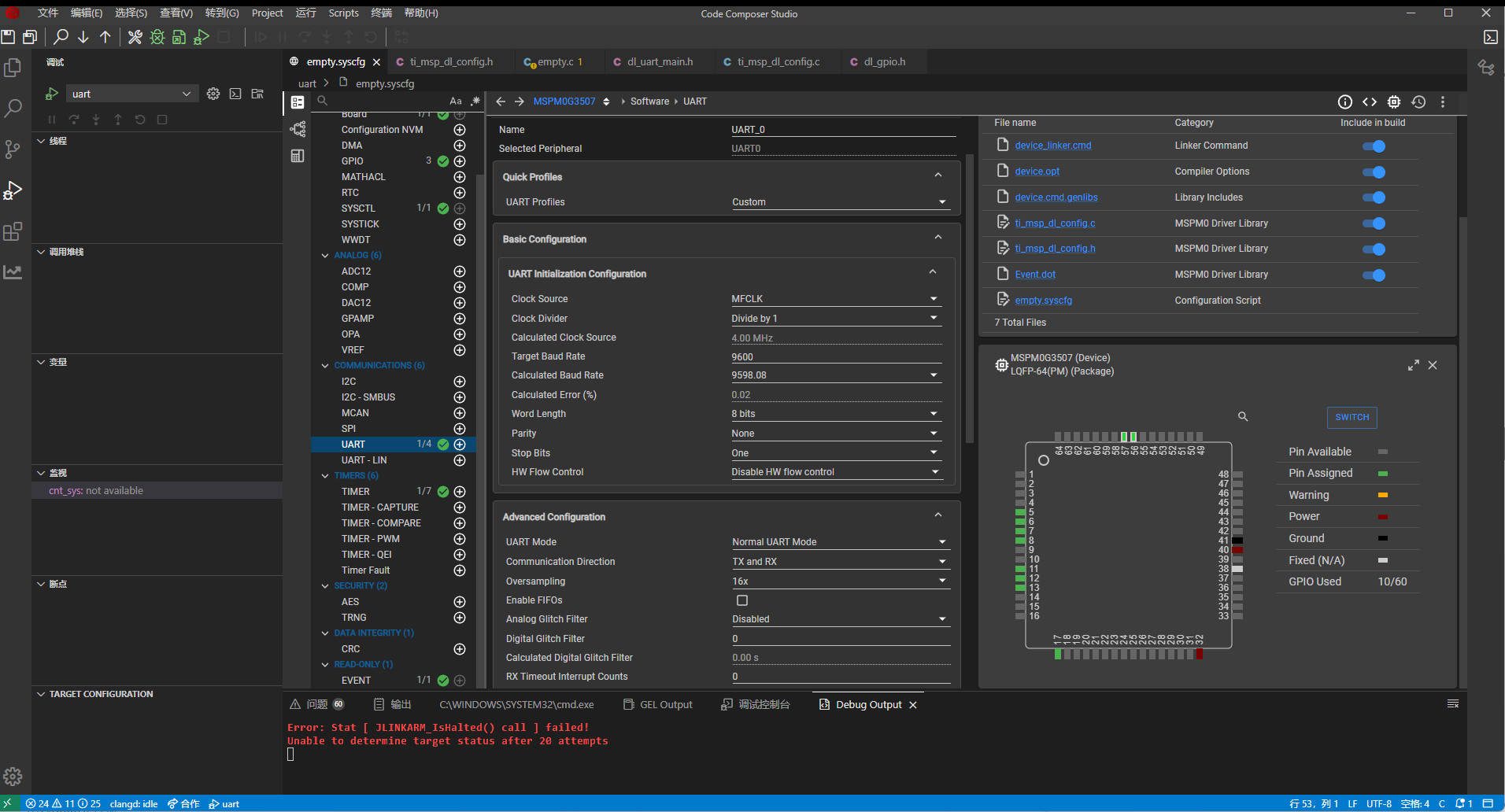
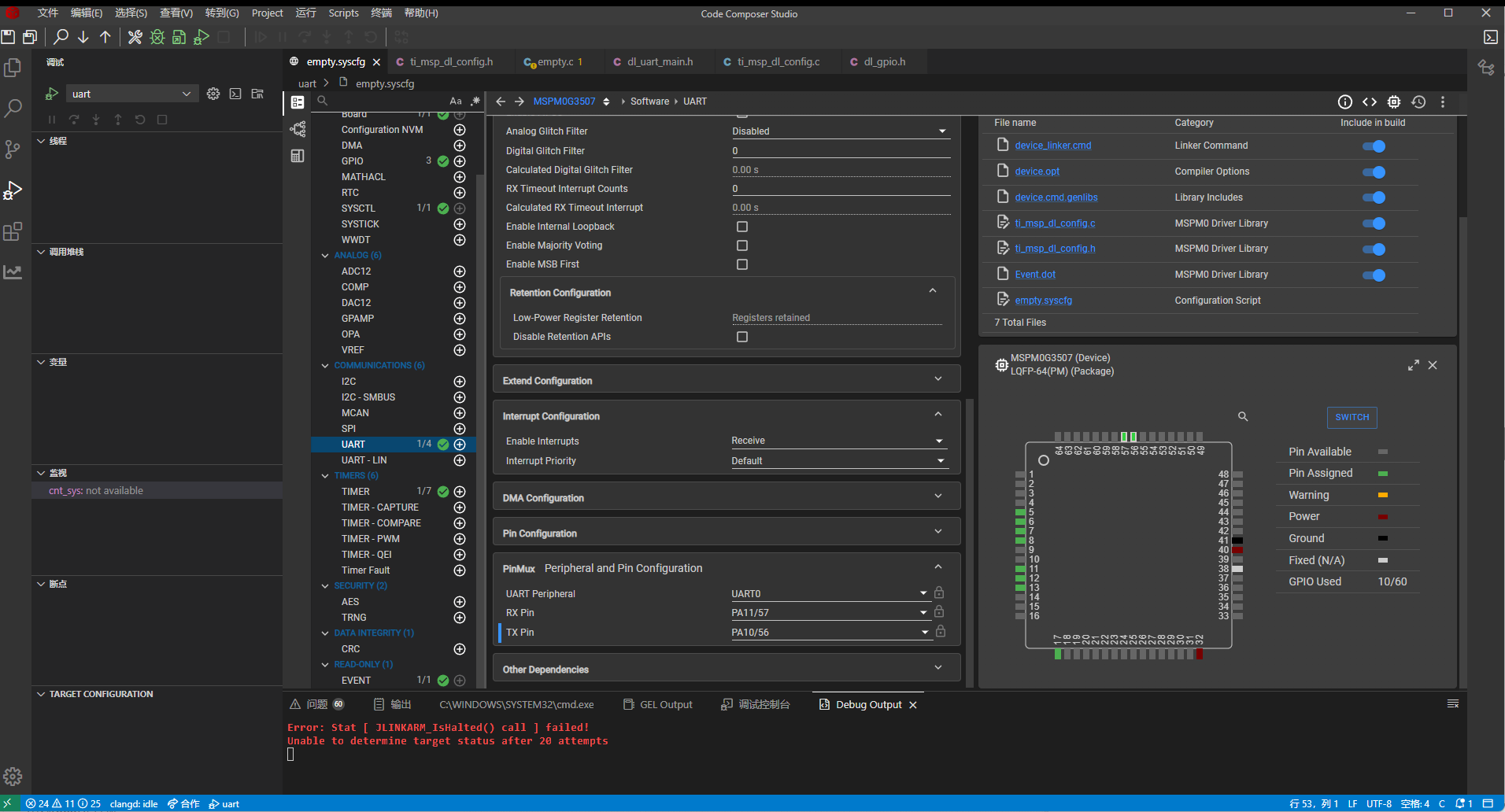
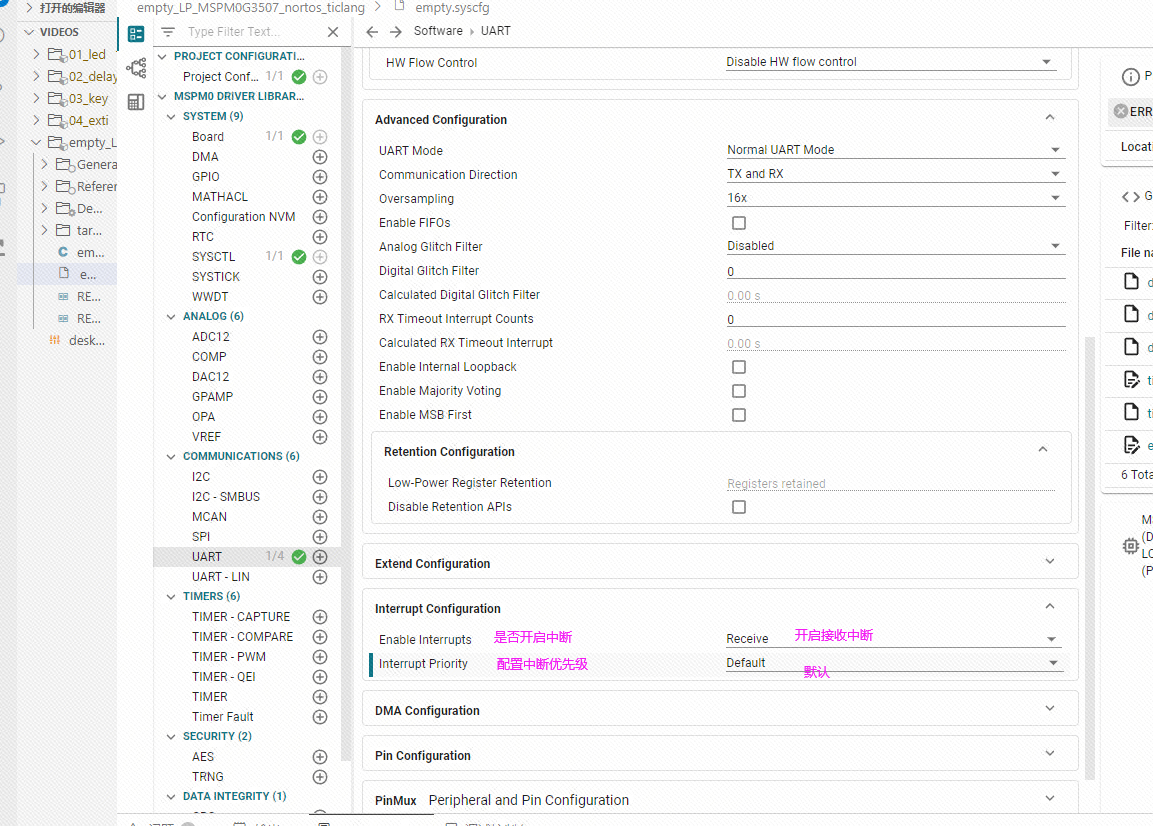
参数介绍



代码编写:
volatile unsigned char uart_data = 0;//定义接收数组
void uart0_send_char(char ch); //串口0发送单个字符
void uart0_send_string(char* str); //串口0发送字符串
//清除串口中断标志
NVIC_ClearPendingIRQ(UART_0_INST_INT_IRQN);
//使能串口中断
NVIC_EnableIRQ(UART_0_INST_INT_IRQN);
//串口发送单个字符
void uart0_send_char(char ch)
{
//当串口0忙的时候等待,不忙的时候再发送传进来的字符
while( DL_UART_isBusy(UART_0_INST) == true );
//发送单个字符
DL_UART_Main_transmitData(UART_0_INST, ch);
}
//串口发送字符串
void uart0_send_string(char* str)
{
//当前字符串地址不在结尾 并且 字符串首地址不为空
while(*str!=0&&str!=0)
{
//发送字符串首地址中的字符,并且在发送完成之后首地址自增
uart0_send_char(*str++);
}
}
//串口的中断服务函数
void UART_0_INST_IRQHandler(void)
{
//如果产生了串口中断
switch( DL_UART_getPendingInterrupt(UART_0_INST) )
{
case DL_UART_IIDX_RX://如果是接收中断
//将发送过来的数据保存在变量中
uart_data = DL_UART_Main_receiveData(UART_0_INST);
//将保存的数据再发送出去
uart0_send_char(uart_data);
break;
default://其他的串口中断
break;
}
}
值得注意的是,这个串口中断是根据字符个数来触发的,也就是说,我输入11,会触发两次中断,用起来没有hal库的串口函数好用

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









