







上文已经给大家介绍过工业机器人的组成及其分类,大家有兴趣可以点击链接查看:工业机器人介绍 - 大大通(简体站) (wpgdadatong.com.cn),本文将给大家介绍一下工业机器人中控制柜的框架。
上文提到,工业机器人由三部分组成:示教器、控制柜和机器人本体。
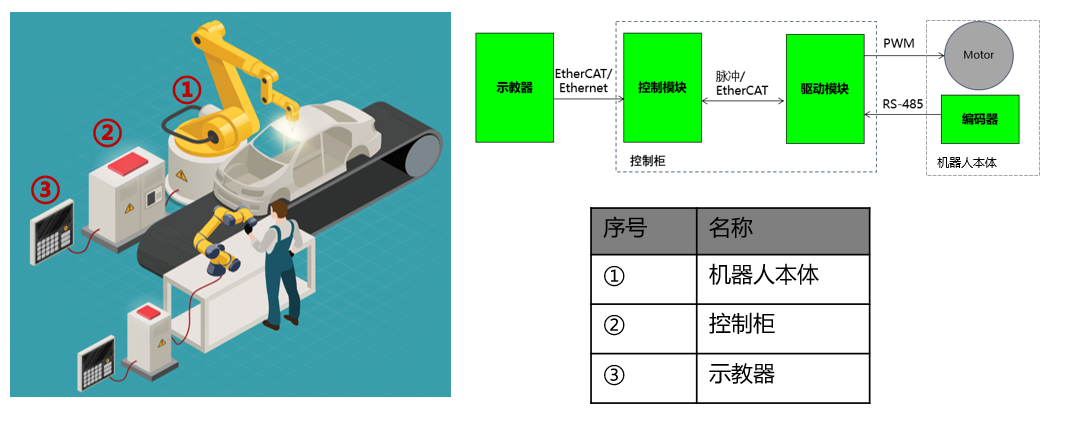
其中控制柜是整个工业机器人系统中的核心部分,它负责接收操作者或自动化系统的指令,控制并驱动机器人的运动。控制柜由四部分组成:控制模块、驱动模块、IO 模块和电源模块。
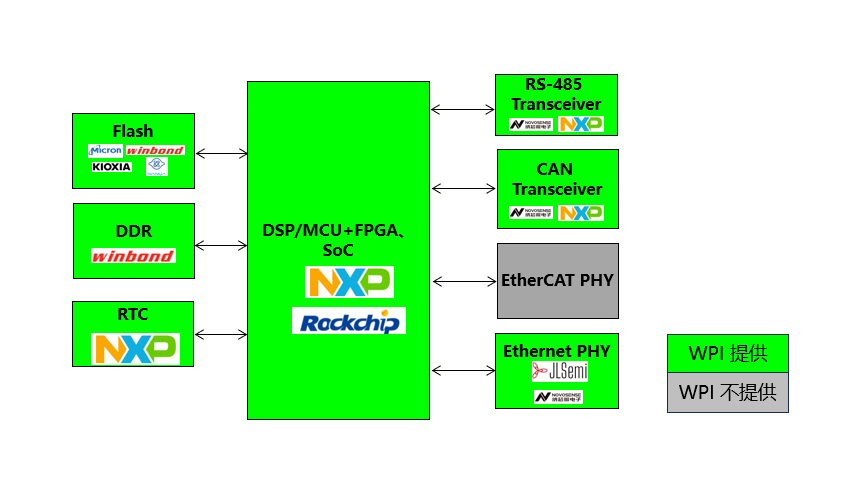
控制模块:
控制模块是控制柜的大脑,控制模块通常负责处理和执行控制算法,发送指令到驱动模块。
其主要功能有:
- 运动规划:制定运动路径或轨迹,对电机运动进行精准控制,如位置、速度、加速度等。
- 信号处理:接收来自传感器的数据,进行数据采集、分析和滤波,以提供实时反馈和调整控制策略
- 控制输出:向执行器发送控制指令,实现对机械运动的精确调节。
- 反馈控制:根据实际运动反馈调整控制策略,以保持运动的稳定性和准确性。
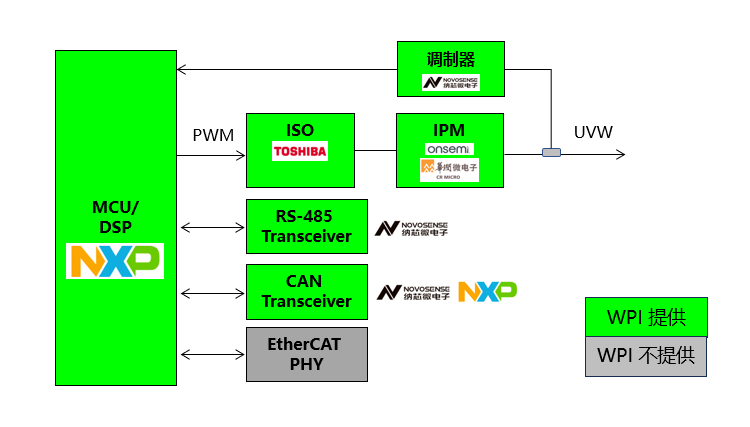
驱动模块:
驱动模块是是控制柜的动力输出部分,将这些指令转化为实际的机械运动或操作。
其功能有:
- 接收指令:从控制模块接收指令,如目标位置、速度、力矩等
- 信号处理:将接收到的指令转化为电信号,驱动电机
- 反馈监测:接收来自电机或传感器的反馈信号,例如位置、电流等,对其输出做实时调整并反馈给控制模块
- 保护功能:提供过载保护、过温保护、短路保护等功能,以防止电机和驱动模块因异常情况而损坏。
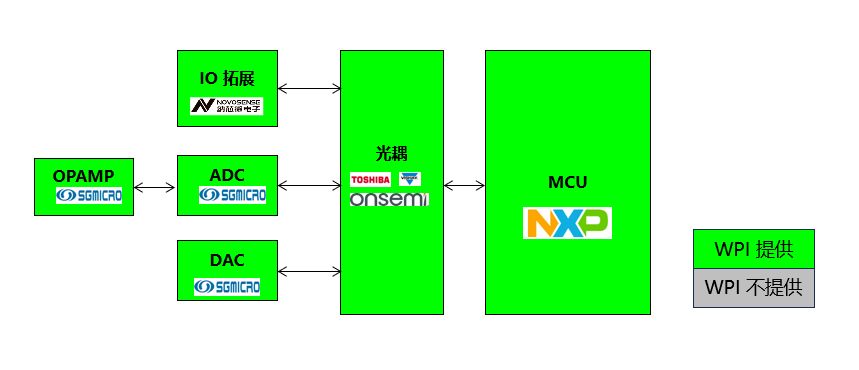
IO 模块:
IO 模块是控制柜与外部设备之间的桥梁在控制柜中,用于接收输入信号并输出控制信号,在传感器和执行器之间进行周期性的数据交换。
其功能有:
- 数字量输入输出(DI/DO):用于处理二进制信号,如按钮、开关、限位开关等信号输入,以及控制电磁阀、继电器等信号输出。
- 模拟量输入输出(AI/AO):模块用于处理连续变化的信号,如温度、压力、流量等的信号输入,以及控制电机速度、阀门开度等的信号输出。
- 实时反馈:传感器采集的数据通过 IO 模块传送到控制模块,随后控制模块对各个关节电机发出调整指令,确保机器人的正常运行。
参考资料:
ABB I/O 板配置ABB机器人I/O板配置:工程师的实战经验分享 (baidu.com)


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









