







 本文探讨了地铁系统中多列车的最大轨道潜力与总能耗的双目标优化,采用基于核密度估计的NSGA-II算法协同优化。研究结果显示,优化方法能降低22.2%的总能耗和40.3%的最大轨电位,有效实现了节能和供电安全。同时,文章还涉及了考虑节能和乘客等待时间的地铁列车优化模型,以及列车间协同控制以降低净能耗的方法。此外,提出了结合客流控制的列车调度和生态驾驶策略,以提高地铁服务的能源效率和乘客体验。
本文探讨了地铁系统中多列车的最大轨道潜力与总能耗的双目标优化,采用基于核密度估计的NSGA-II算法协同优化。研究结果显示,优化方法能降低22.2%的总能耗和40.3%的最大轨电位,有效实现了节能和供电安全。同时,文章还涉及了考虑节能和乘客等待时间的地铁列车优化模型,以及列车间协同控制以降低净能耗的方法。此外,提出了结合客流控制的列车调度和生态驾驶策略,以提高地铁服务的能源效率和乘客体验。
目录
一种强大的列车时刻表优化方法,可减少地铁系统中的等待乘客数量
以乘客需求为导向的动态地铁列车调度,具有能源效率和等待时间最小化:混合整数线性规划方法
An Energy-Efficient Train Operation Approach by Integrating the Metro Timetabling and Eco-Driving
An Intelligent Train Operation Method Based on Event-Driven Deep Reinforcement Learning
An eco-driving algorithm for trains through distributing energy: A Q-Learning approach
一种通过能量分配实现列车生态驱动算法:一种Q-Learning方法
Cooperative Control of Metro Trains to Minimize Net Energy Consumption
Demand-driven timetable design for metro services
随机需求下机车车辆循环地铁列车调度的演员-评论家深度强化学习方法
一种兼顾非对称客需和运营成本的地铁线路运营策略综合优化的精确方法
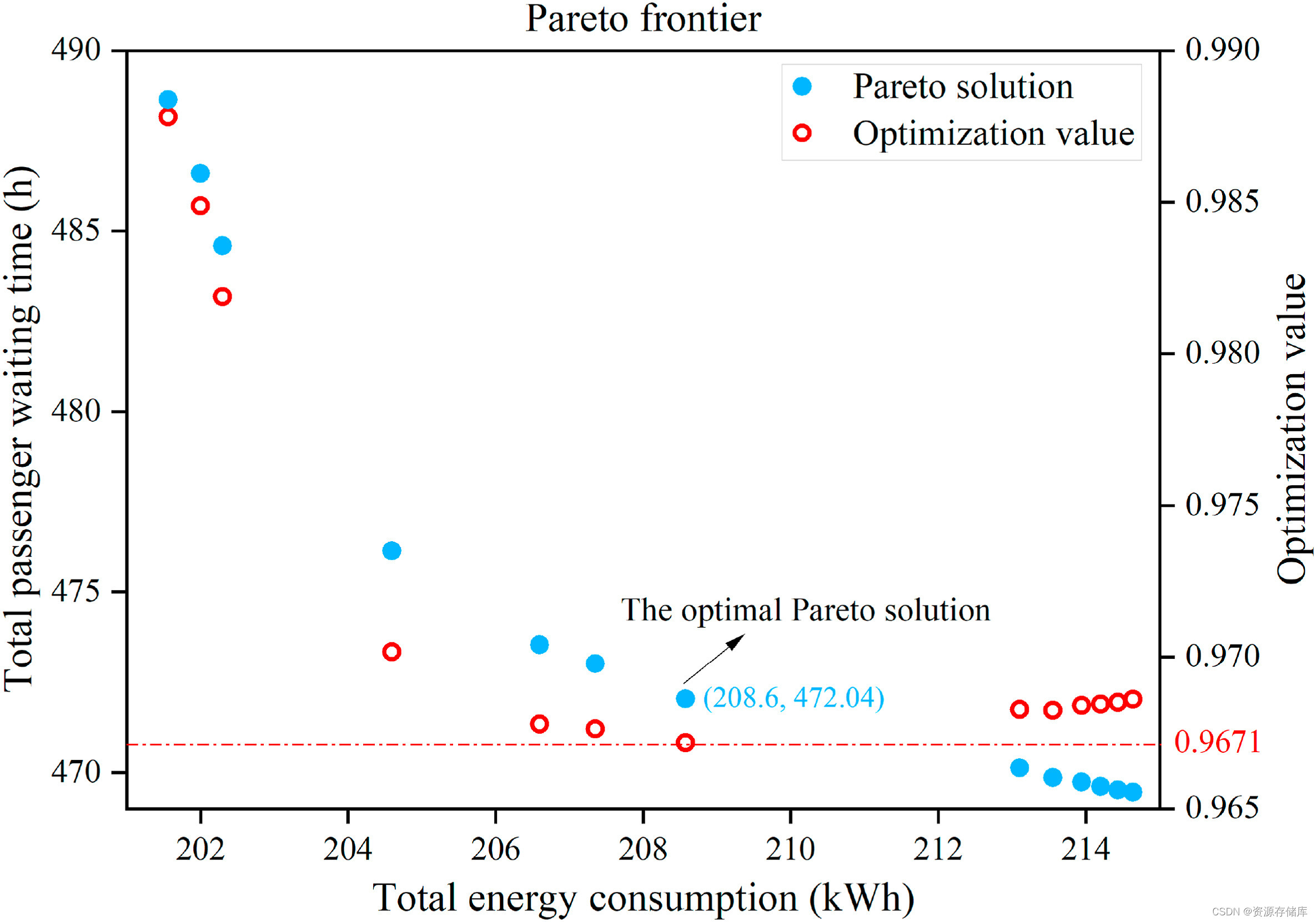
A flexible metro train scheduling approach to minimize energy cost and passenger waiting time
灵活的地铁列车调度方法,可最大限度地降低能源成本和乘客等待时间
列车调度,通过瞬态需求和跳停模式最大限度地减少乘客等待时间:具有线性约束的非线性整数规划模型
Exact formulations and algorithm for the train timetabling problem with dynamic demand
Multi-Objective Timetabling Optimization for a Two-Way Metro Line Under Dynamic Passenger Demand
An Integrated Optimization Model for Energy Saving in Metro Operations
Train trajectory optimisation of ATO systems for metro lines
Dual-Objective Optimization of Maximum Rail Potential and Total Energy Consumption in Multitrain Subway Systems
多列车地铁系统最大轨道潜力和总能耗的双目标优化
ABSTRACT
摘要
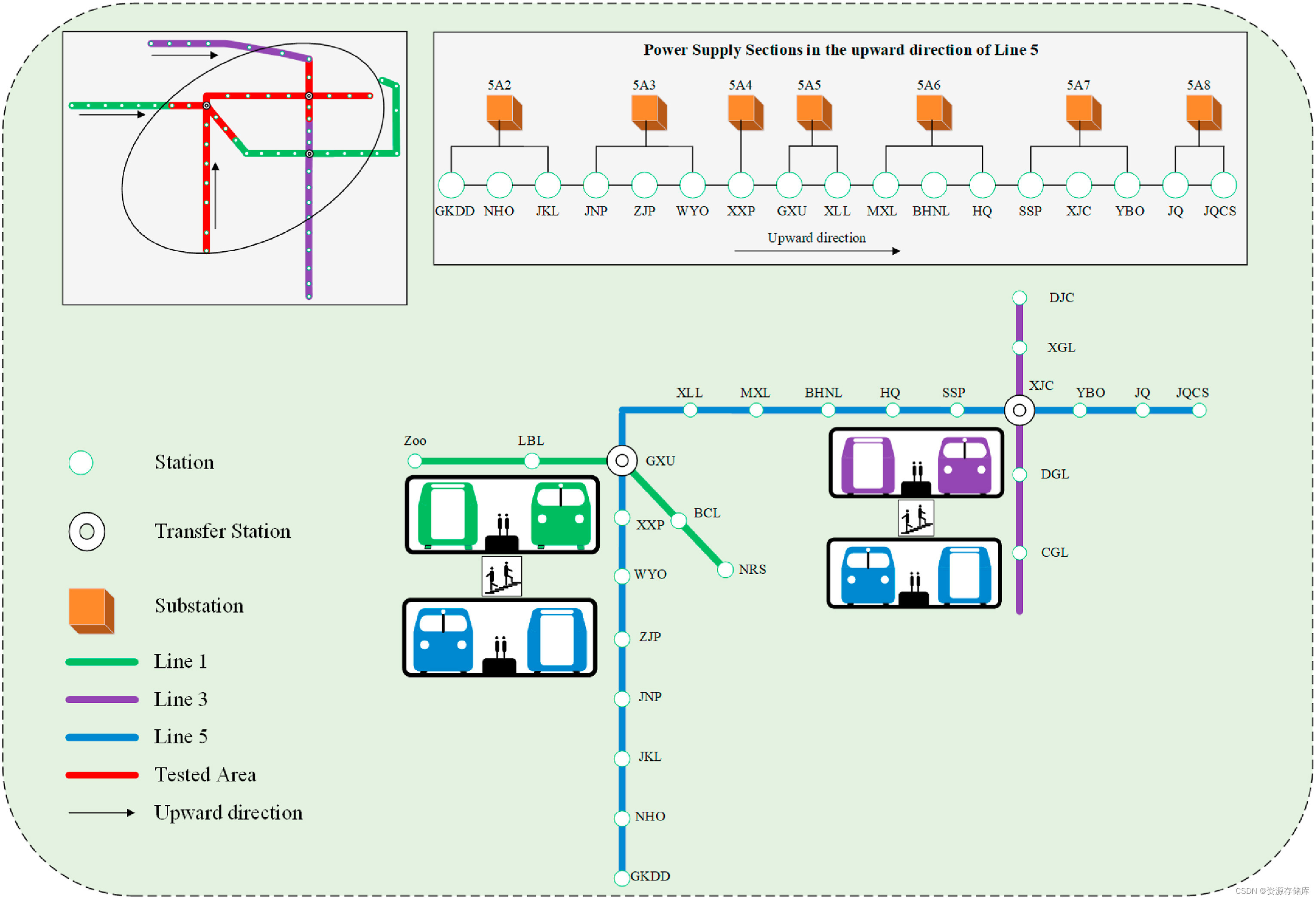
The dc traction power system is commonly adopted in multitrain subway systems. During the operation of multiple trains, different power distribution of the system directly affects the energy consumption and power supply safety. It is urgent for multitrain subway systems to optimize the operation parameters to ensure energy-saving and safety. In this article, nondominated sorting genetic algorithm II (NSGA-II) based on kernel density estimation (KDE) is proposed for collaborative optimization of total energy consumption and the maximum rail potential in the system. First, a simulation model for the dynamic operation of multiple trains with a parallel multiconductor traction network is established to realize the dynamic flow calculation with train–network coupling. Second, a dual-objective optimization model of the maximum rail potential and the total energy consumption is formulated to realize the energy-saving and power supply safety of the system. Finally, the NSGA-II algorithm based on KDE is proposed to handle the dual-objective optimization model. According to the dynamic simulations of Guangzhou Metro Line 2, the optimization method is verified. Results show that the total energy consumption is reduced by 22.2%, and the maximum rail potential is dropped by 40.3%, which effectively realizes the energy-saving and power supply safety.
直流牵引动力系统通常用于多列车地铁系统。在多列列车运行过程中,系统的不同配电直接影响能耗和供电安全。地铁多列车系统亟需优化运行参数,确保节能安全。本文提出基于核密度估计(KDE)的非支配分选遗传算法II(NSGA-II),用于协同优化系统中的总能耗和最大轨电位。首先,建立多线并联牵引网多列车动态运行仿真模型,实现列车-网络耦合的动态流量计算;其次,制定最大钢轨电位和总能耗的双目标优化模型,实现系统的节能和供电安全;最后,提出基于KDE的NSGA-II算法来处理双目标优化模型。通过对广州地铁2号线的动态仿真,验证了优化方法的验证。结果表明,总能耗降低22.2%,最大轨道电位下降40.3%,有效实现了节能和供电安全。
Fig. 25. Comparisons of the Pareto fronts and solutions’ distribution under different situations in case 2. (a) Time sensitivity. (b) Energy sensitivity.
图 25.案例 2 中不同情况下帕累托前沿和解分布的比较。(a) 时效性。(b) 能量敏感性。
Fig. 19. Comparisons of the Pareto fronts in case 2.
图 19. 案例 2 中帕累托前沿的比较。
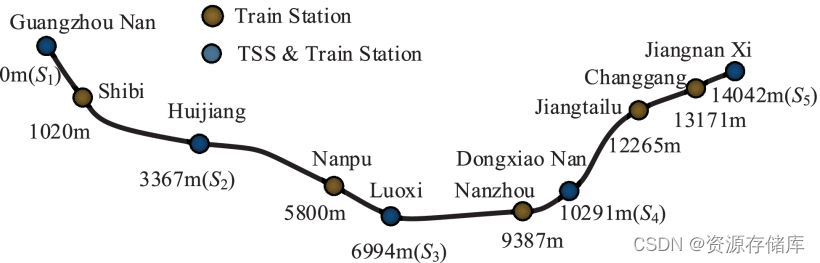
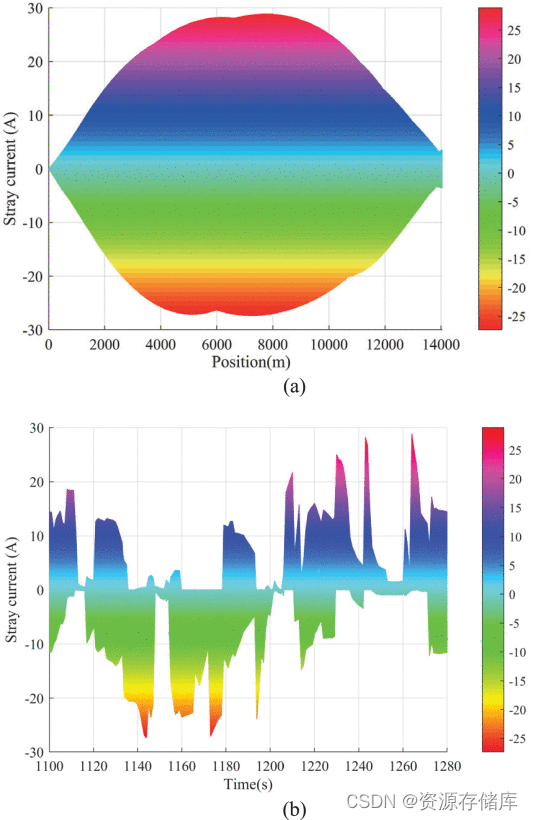
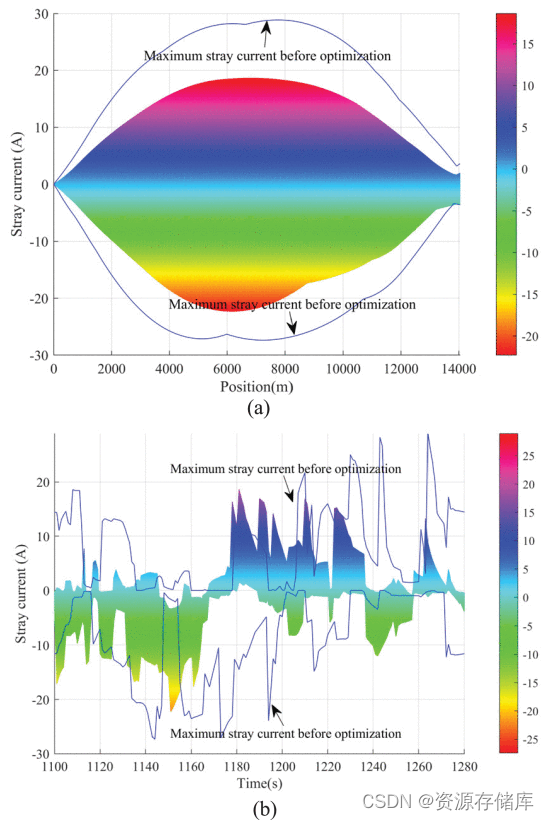
 Fig. 8. Comparisons of (a) Pareto fronts and (b) solutions’ distribution under different situations in case 1.
Fig. 8. Comparisons of (a) Pareto fronts and (b) solutions’ distribution under different situations in case 1.
图 8. 案例 1 中不同情况下 (a) 帕累托前沿和 (b) 解分布的比较。
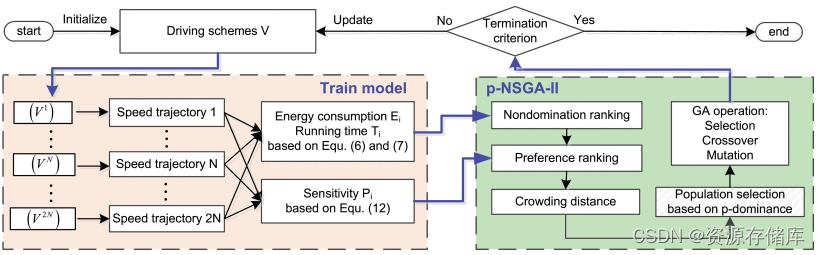
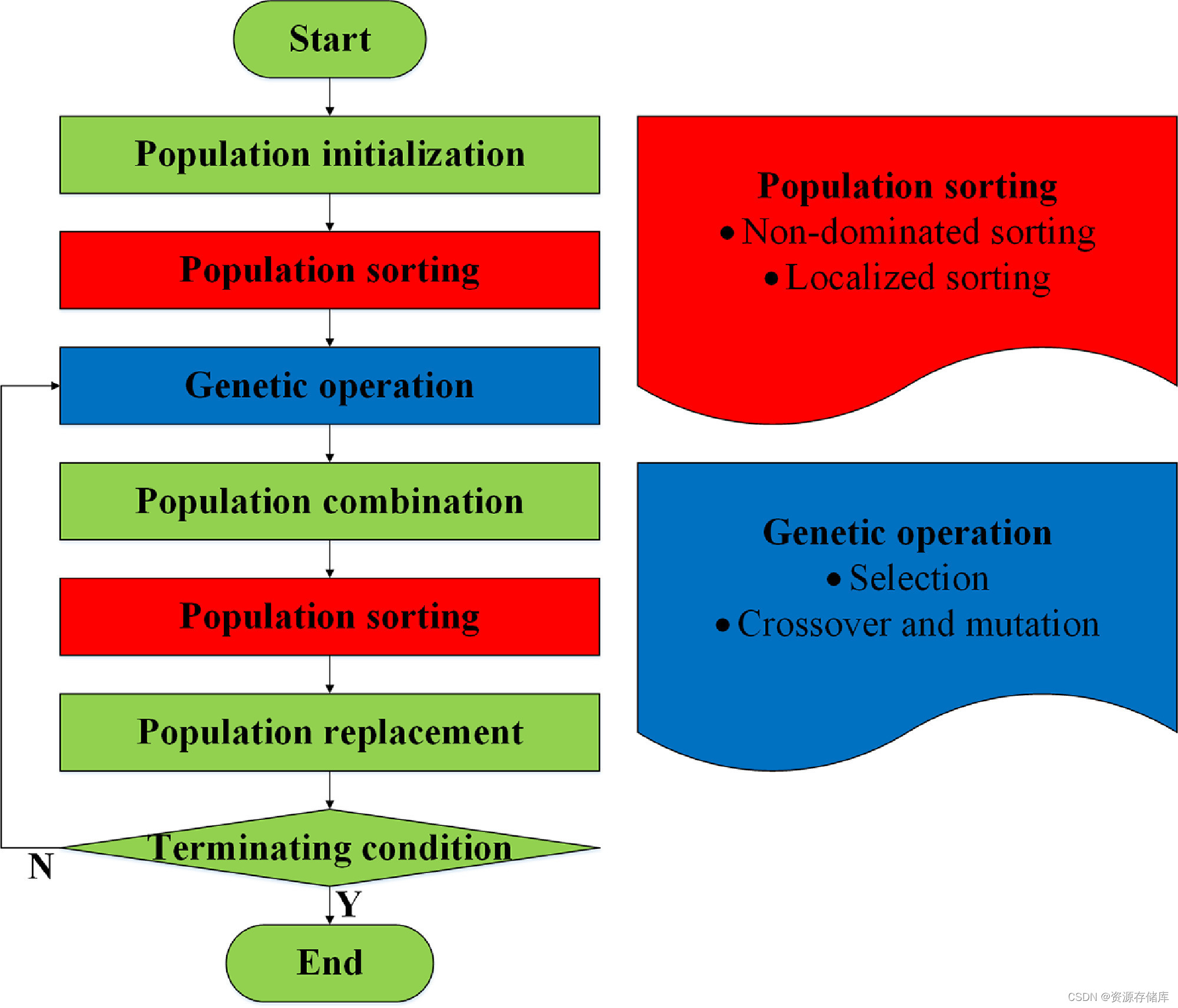
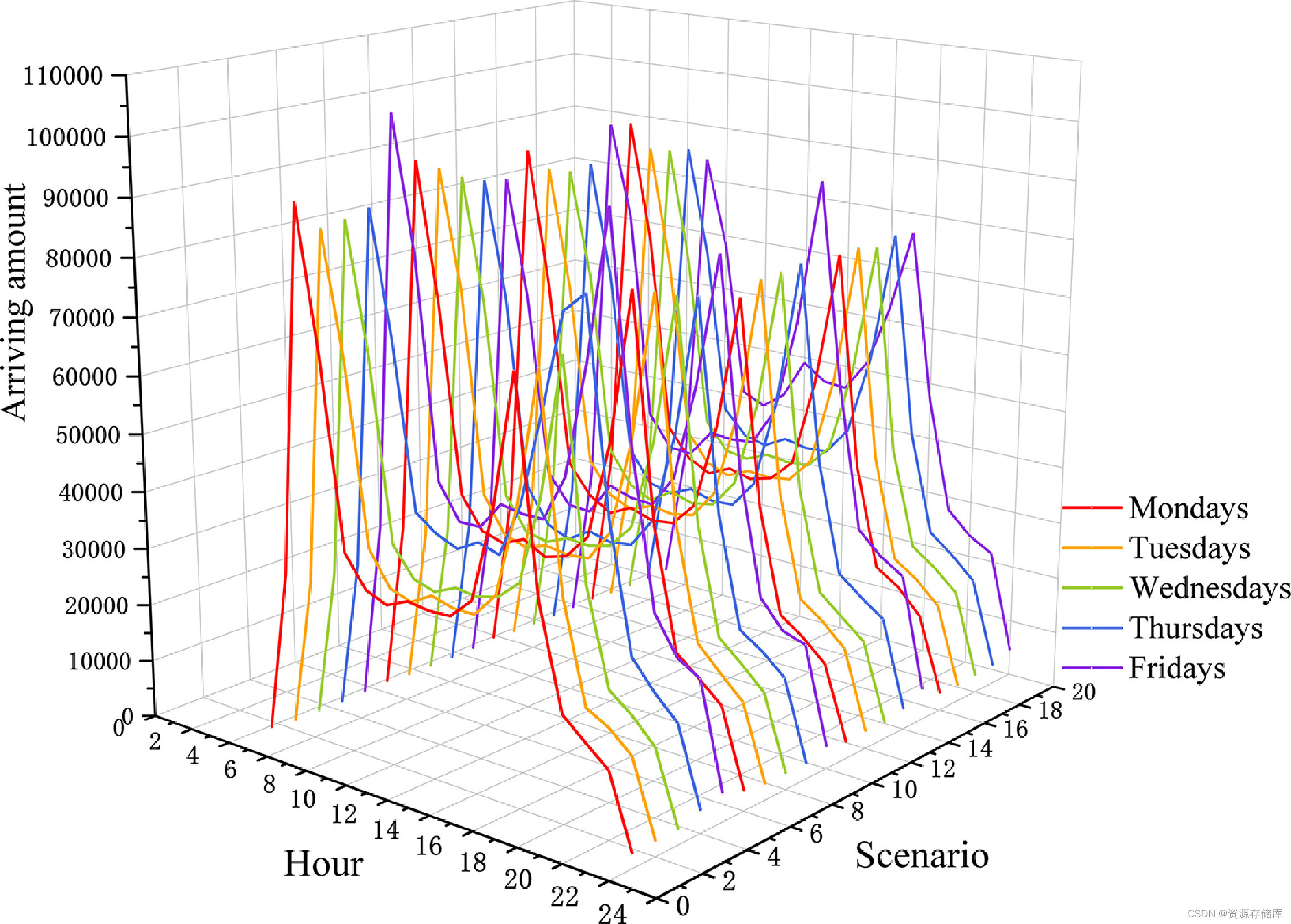
Fig. 14. Hourly arriving amounts in Shenyang Metro network under the twenty scenarios.
图 14.20种情景下沈阳地铁网每小时到站量。
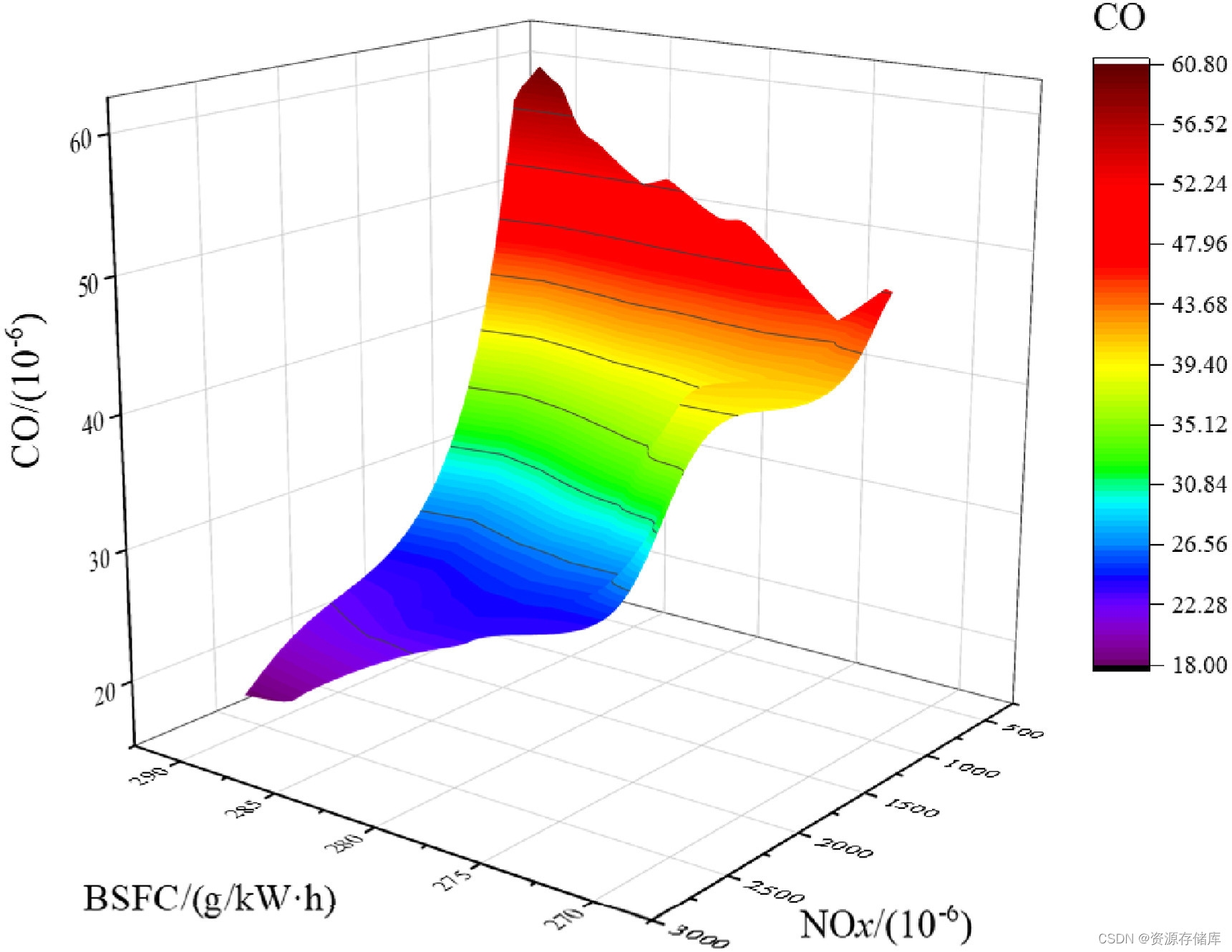
Fig. 14. Pareto-optimal solution boundaries of BSFC, NOx, and CO.
图 14.BSFC、NO x 和 CO 的帕累托最优解边界。
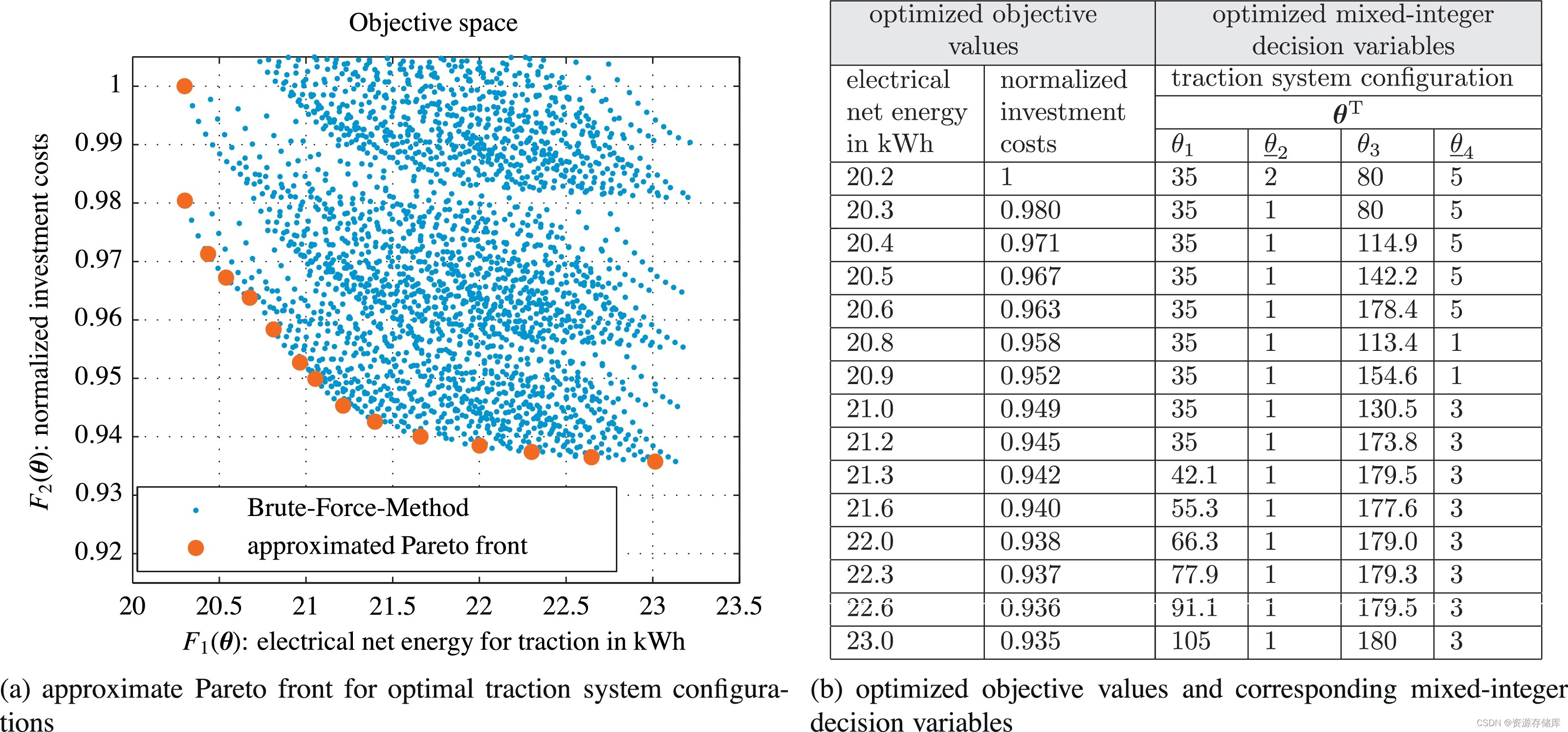
Fig. 8. Results case study 1: overall investment costs for the traction system vs electrical net energy for a fixed maximum travel time �max=65s.
图 8.结果案例研究 1:牵引系统的总投资成本与固定最大行驶时间 �max=65s 的电净能量。
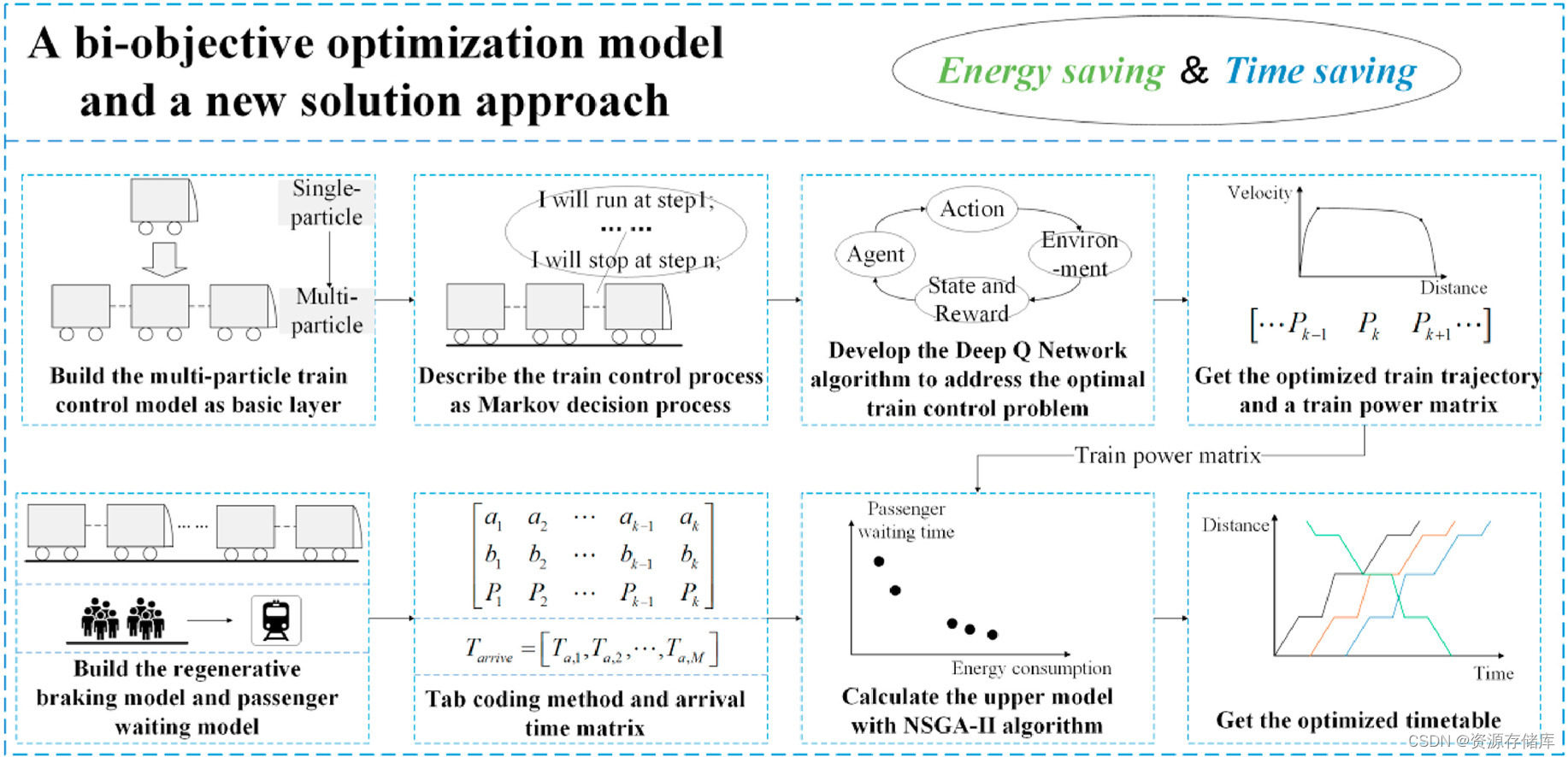
A bi-objective optimization model of metro trains considering energy conservation and passenger waiting time
考虑节能和乘客等待时间的地铁列车双目标优化模型
Collaborative optimization for metro train scheduling and train connections combined with passenger flow control strategy☆
结合客流控制策略的地铁列车开行与衔接协同优化研究
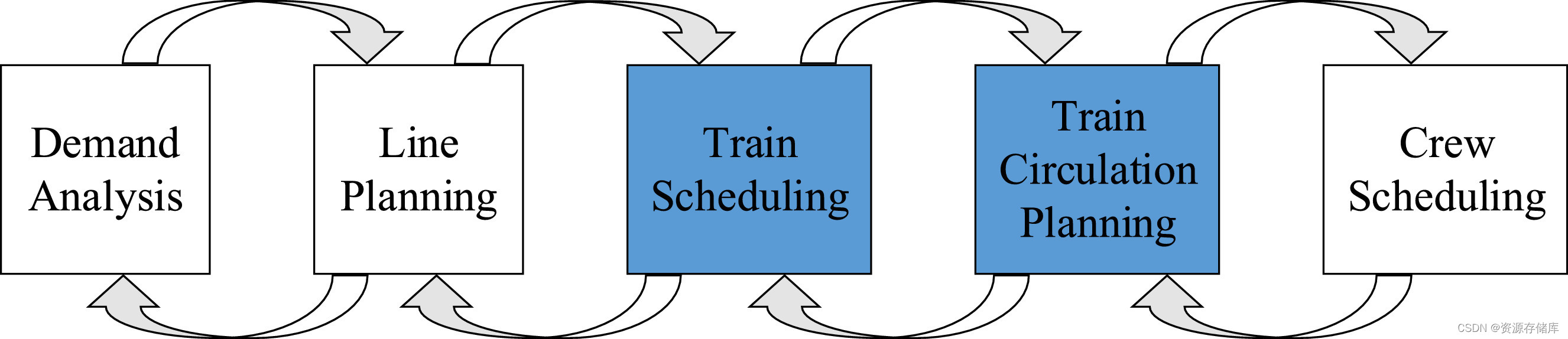
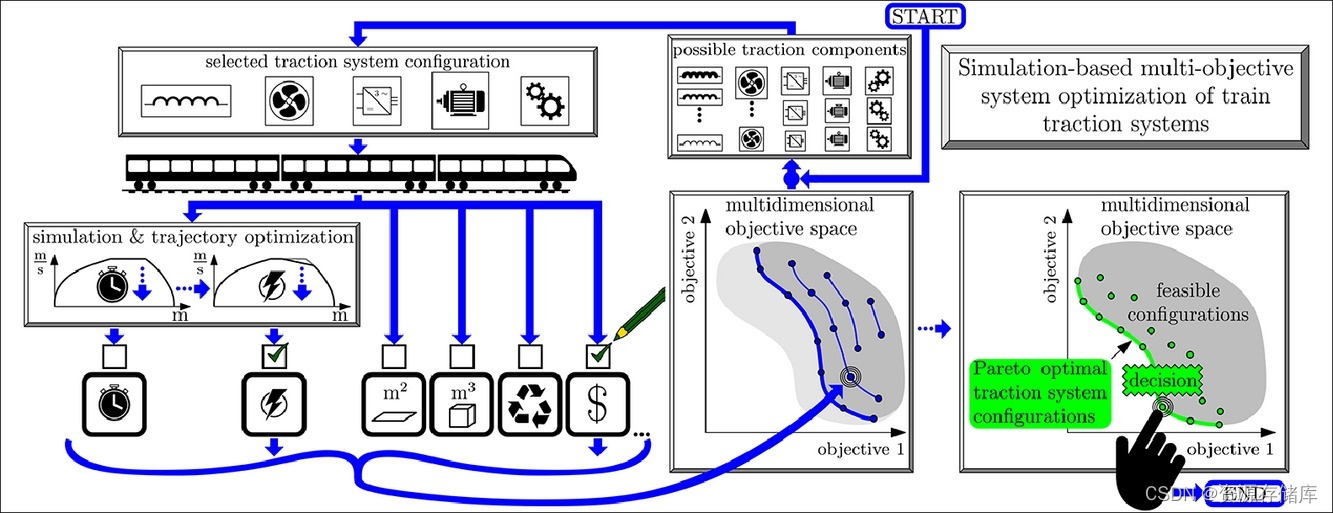
Fig. 1. Planning process for metro system.
图1.地铁系统的规划过程。
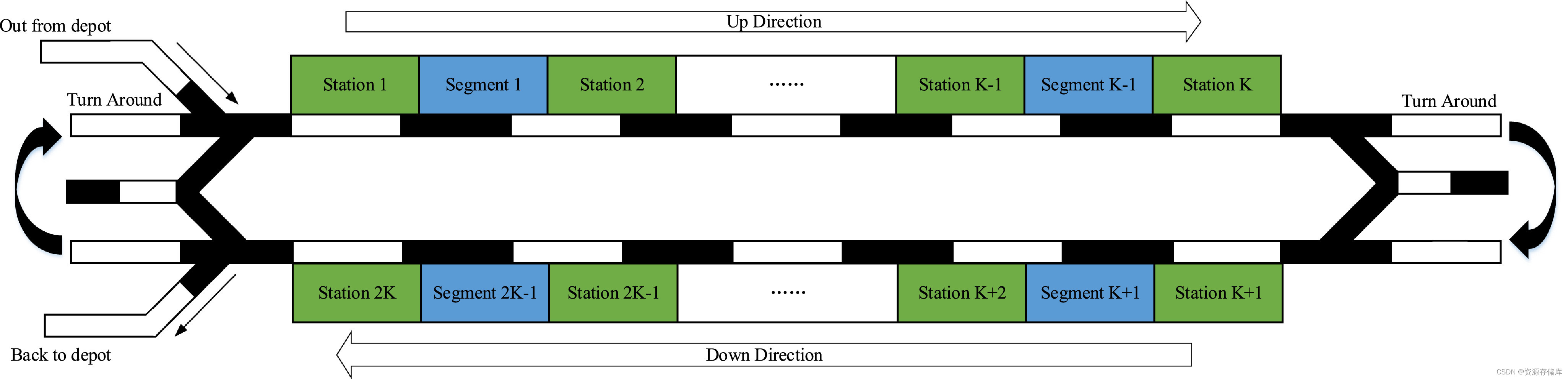
Fig. 2. Considered bi-directional metro line in this study.
图2.本研究考虑双向地铁线路。
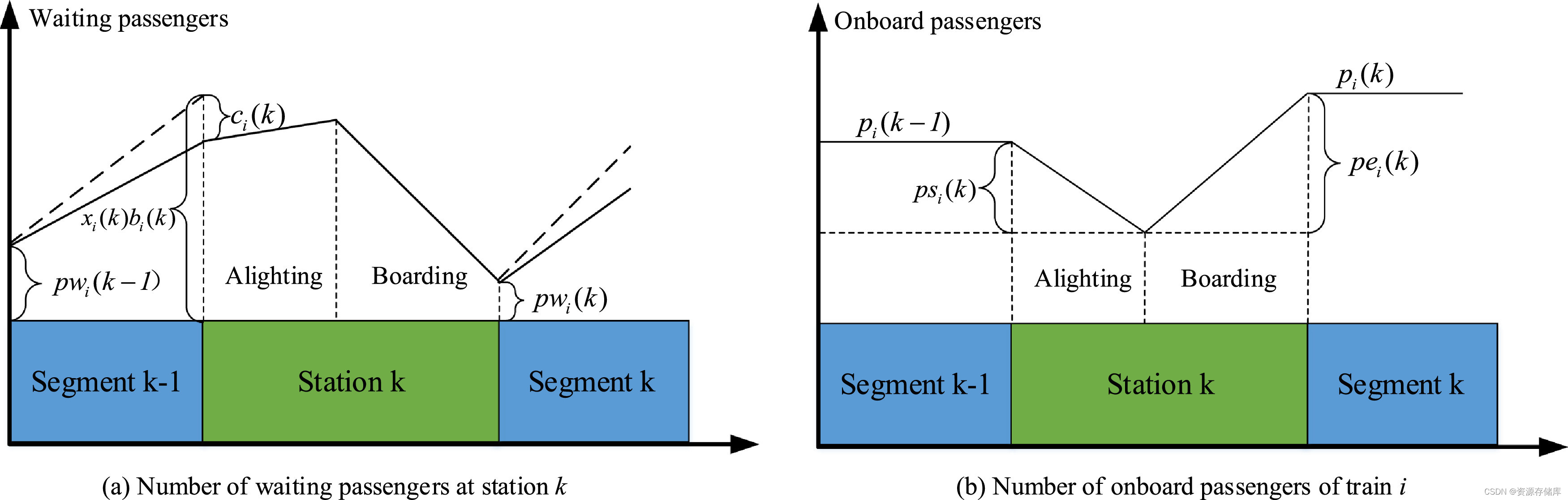
Fig. 4. An illustration of passenger number variations of train service i at station k.
见图4。列车服务i在k站的乘客数量变化的说明。
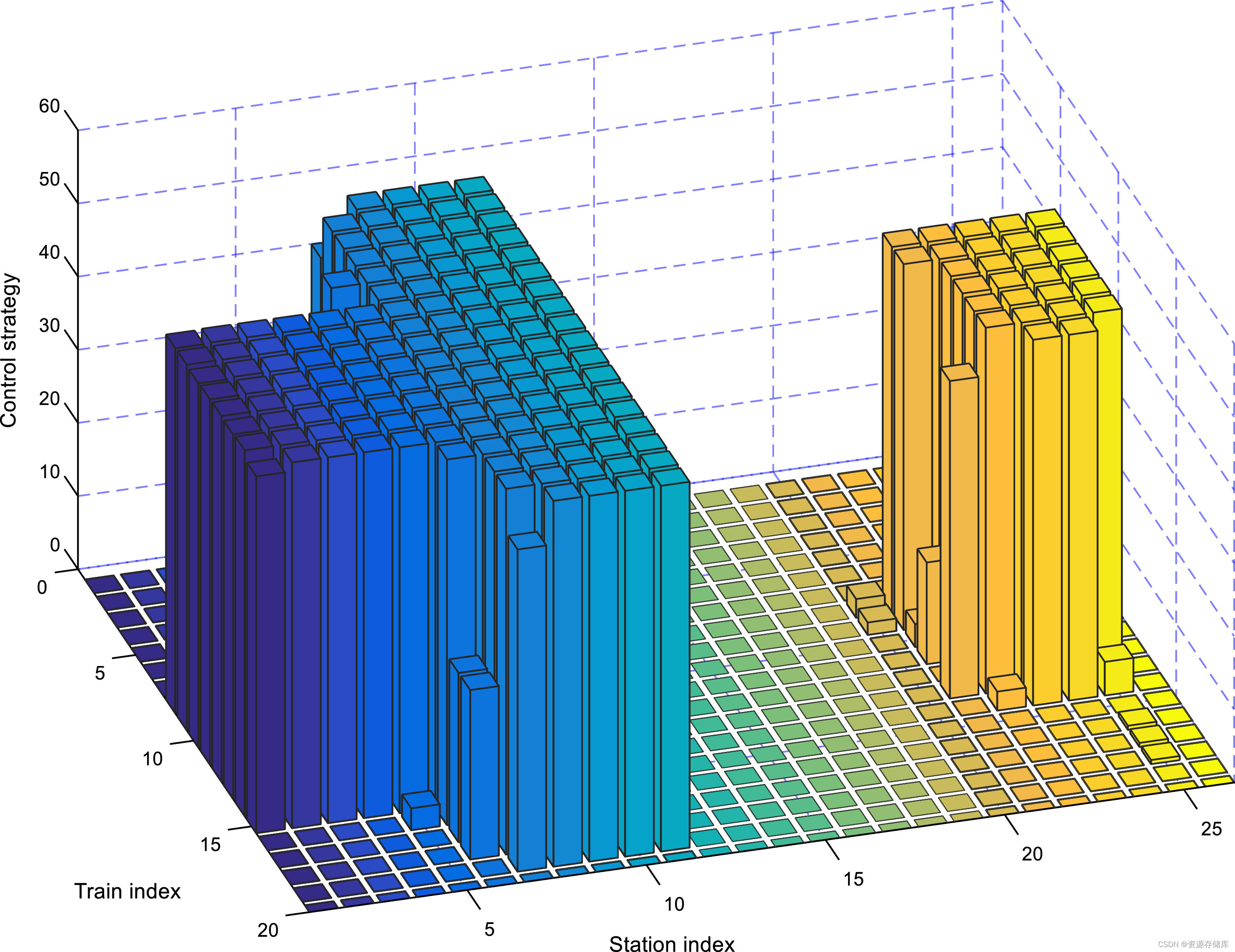
Fig. 8. The illustration of passenger control strategy.
图8.乘客控制策略的说明。
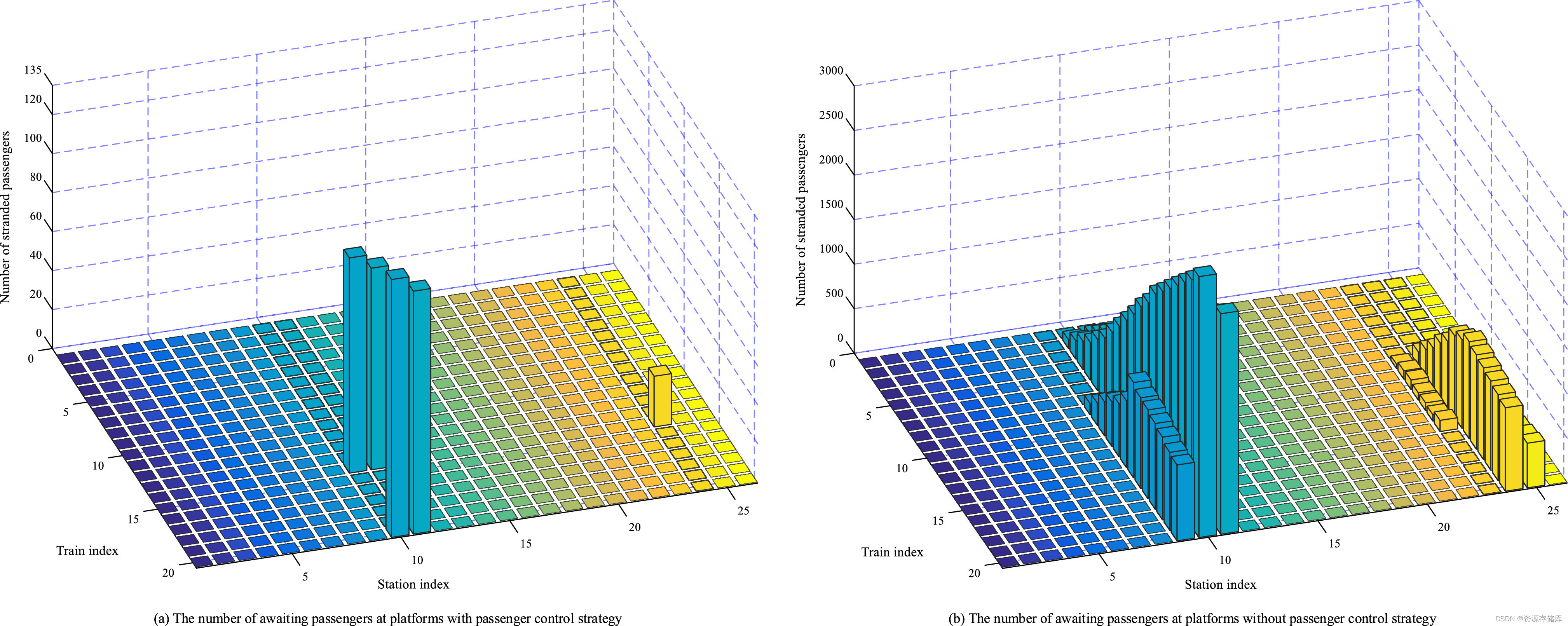
Fig. 9. The number of awaiting passengers at platforms in Case 1 and Case 2.
图9.例1和例2的站台候车人数。
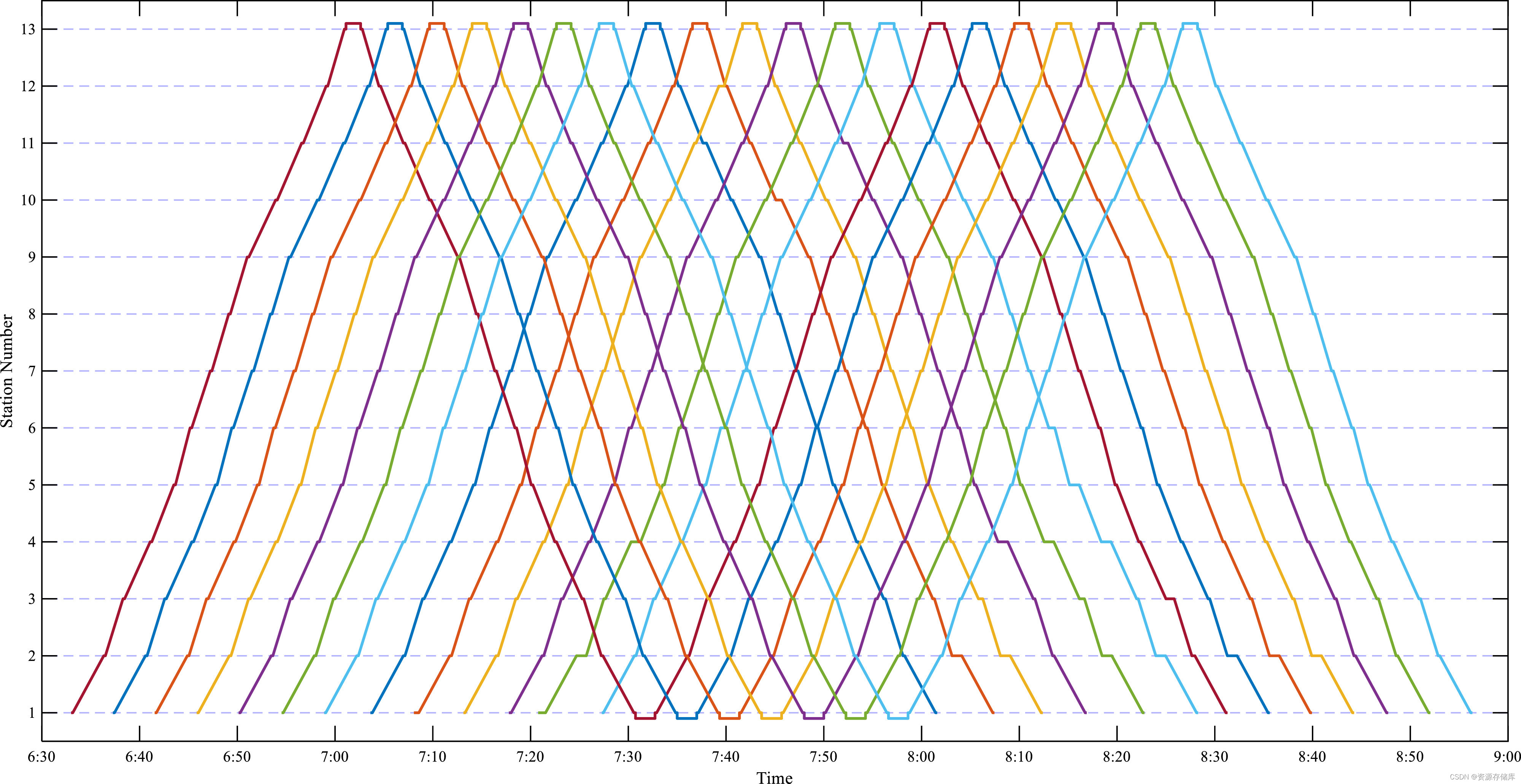
Fig. 10. The obtained train schedule with 20 train services.
图10.获得的列车时刻表有20个列车服务。
Energy-efficient operation by cooperative control among trains: A multi-agent reinforcement learning approach
列车间协同控制的节能运行:一种多智能体强化学习方法
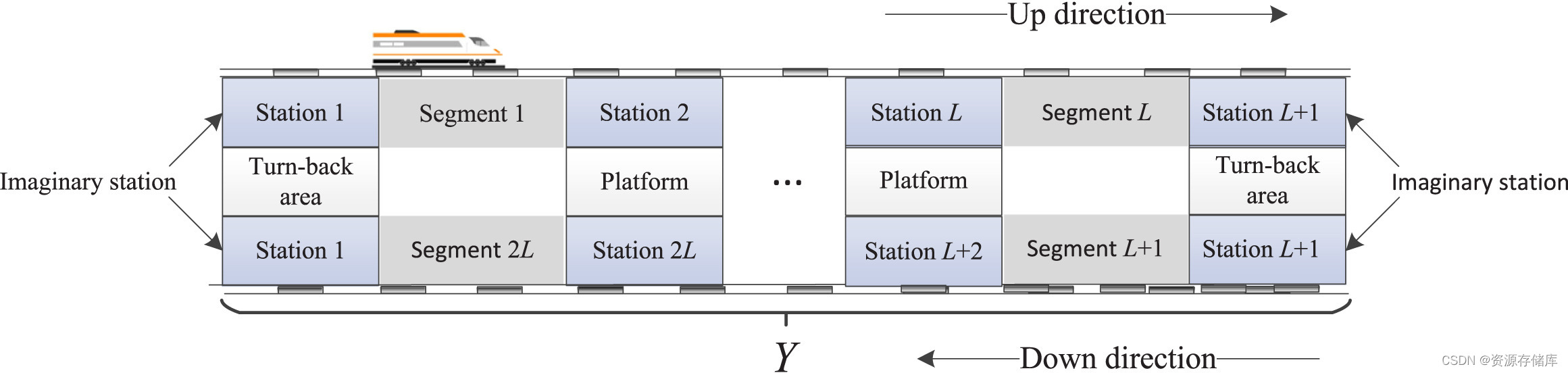 Fig. 1. Bi-directional URT line (Yin et al., 2016).
Fig. 1. Bi-directional URT line (Yin et al., 2016).
图 1.双向URT线(Yin等人,2016)。
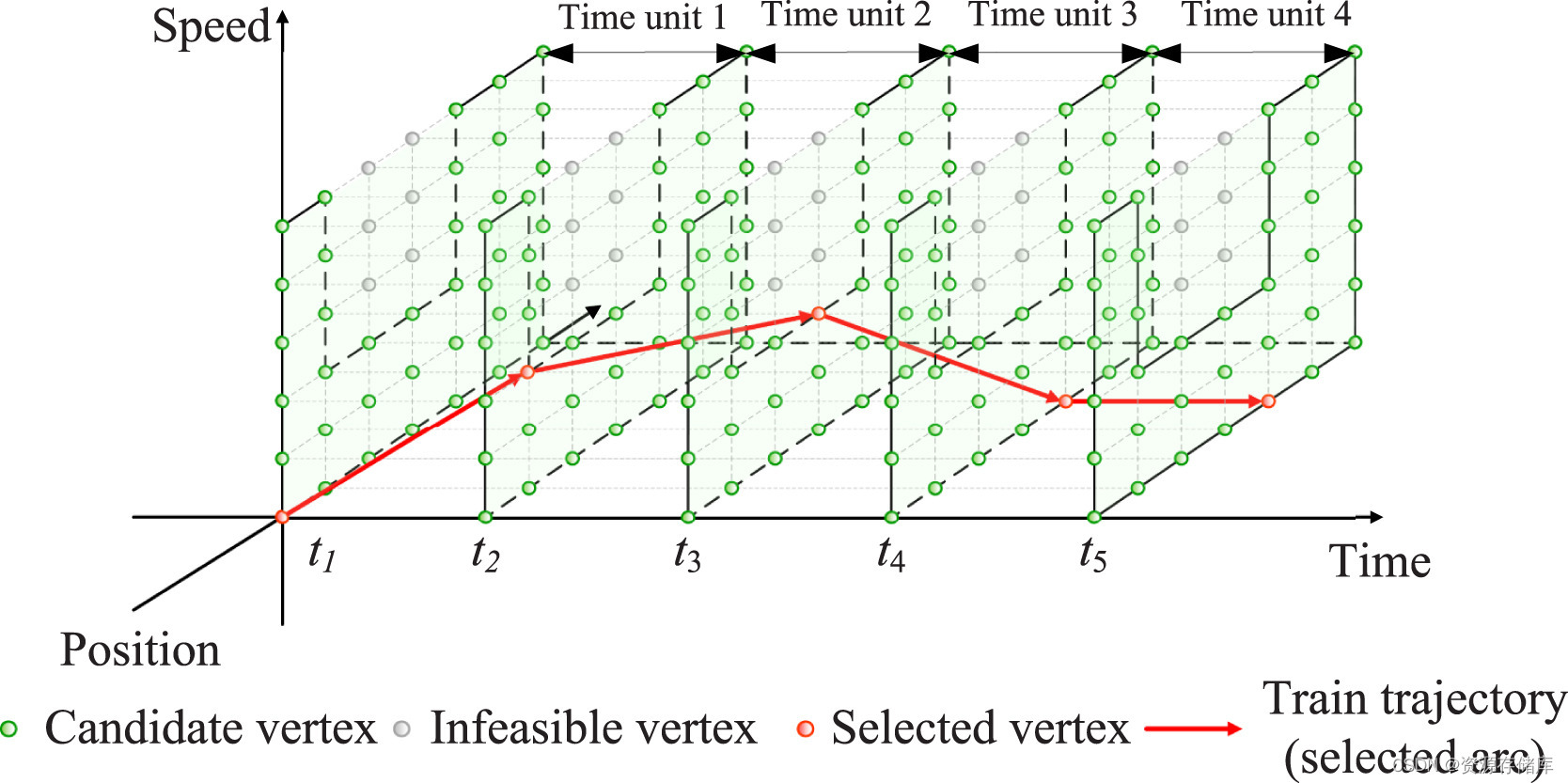
Fig. 2. STS network (Zhou et al., 2017).
图 2.STS网络(Zhou等人,2017)。
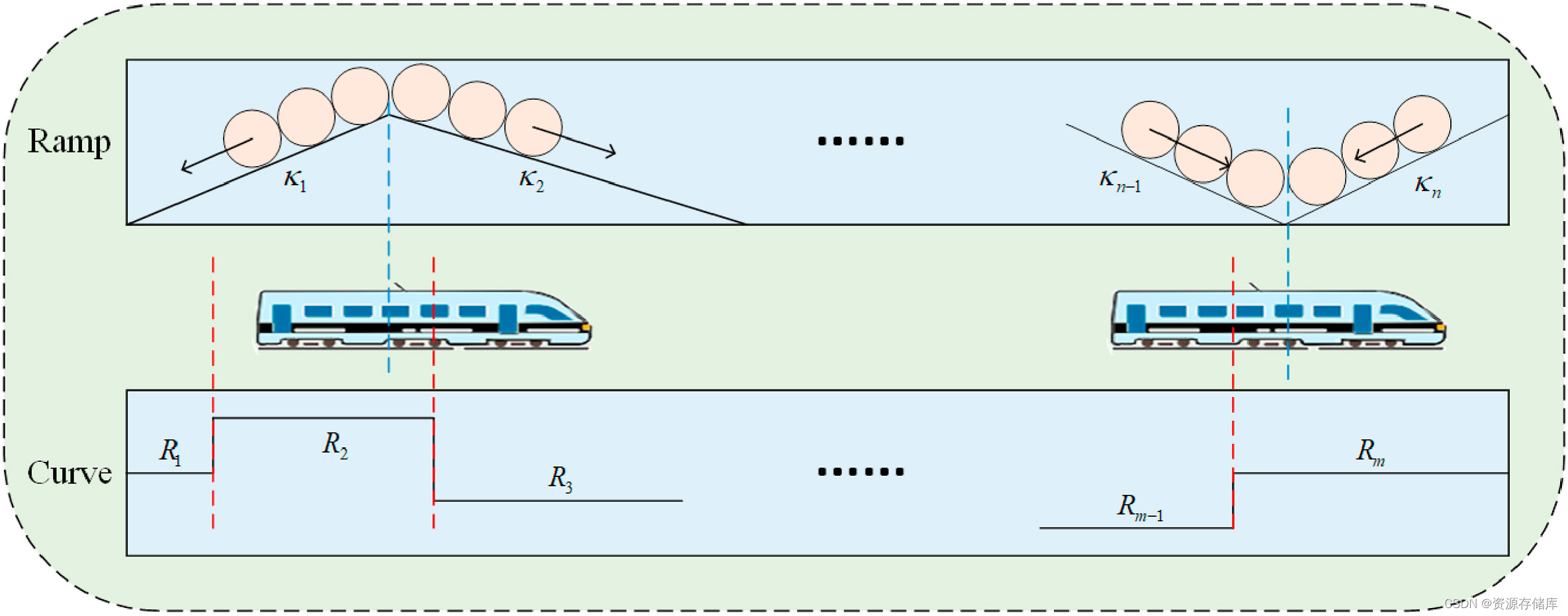
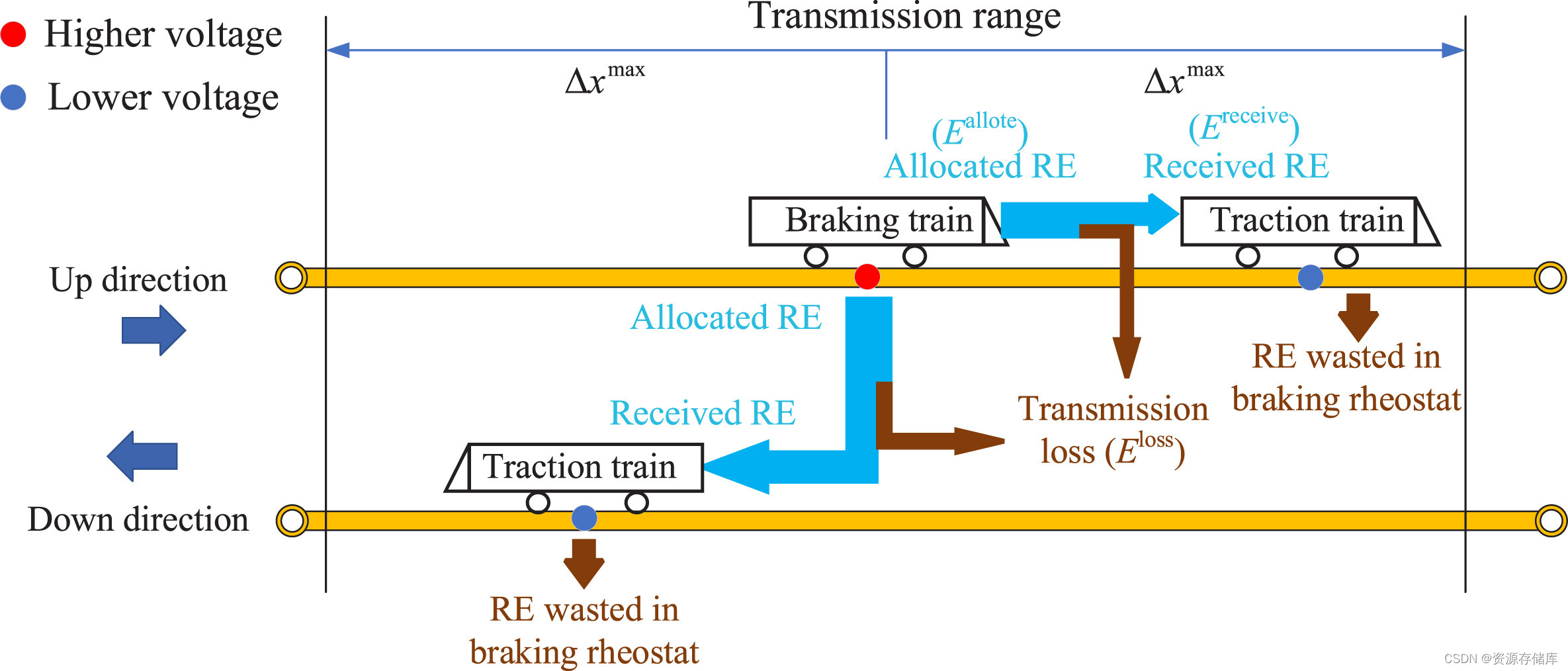 Fig. 3. Transmission mechanism of RE in the URT systems.
Fig. 3. Transmission mechanism of RE in the URT systems.
图 3.RE在URT系统中的传播机制。
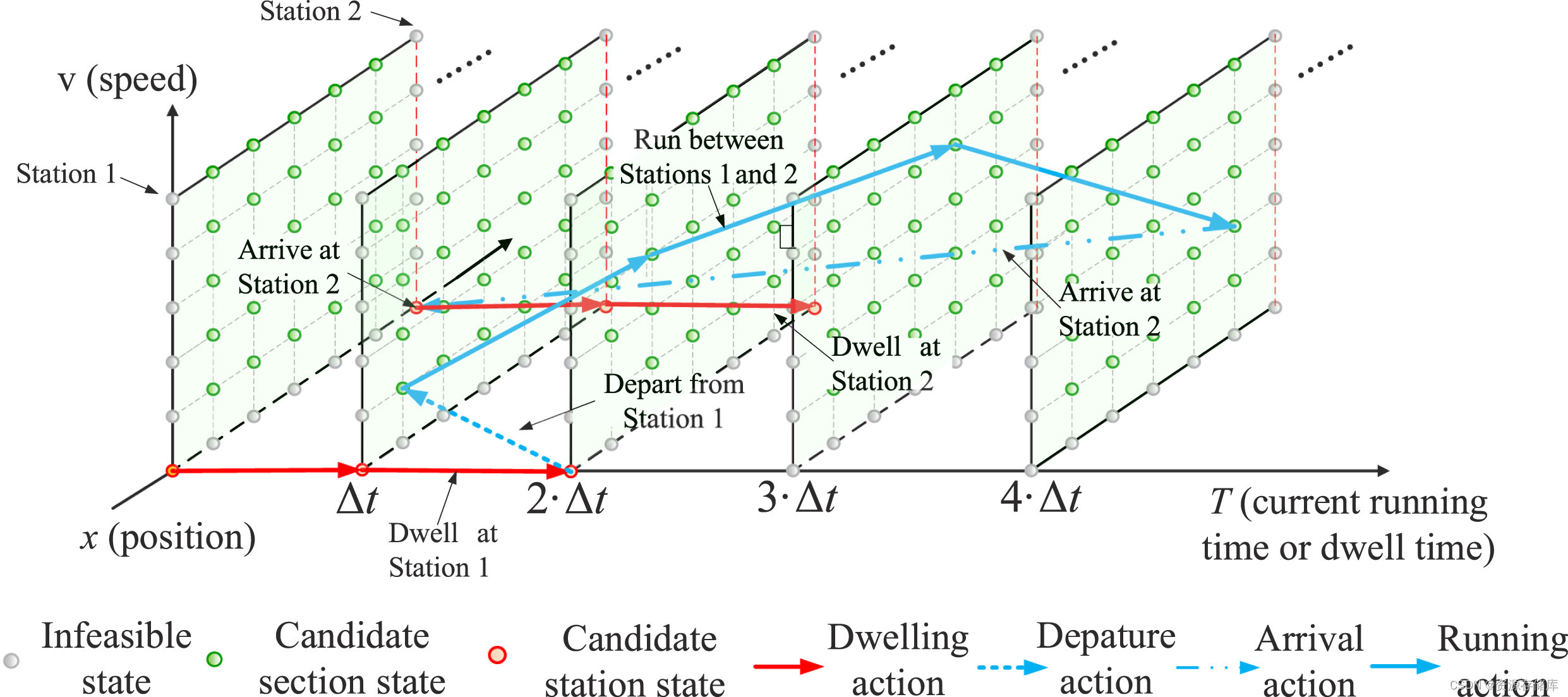
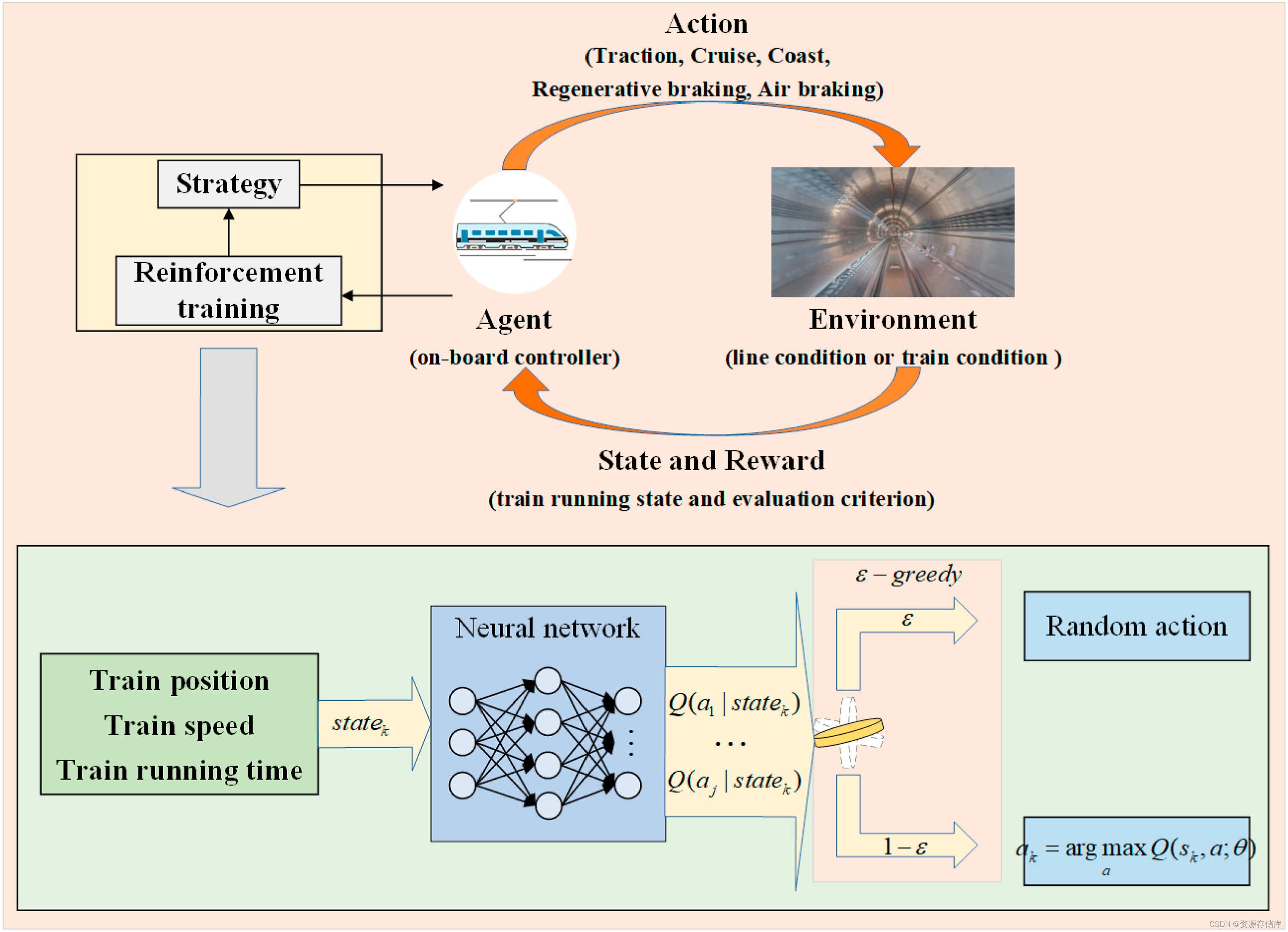
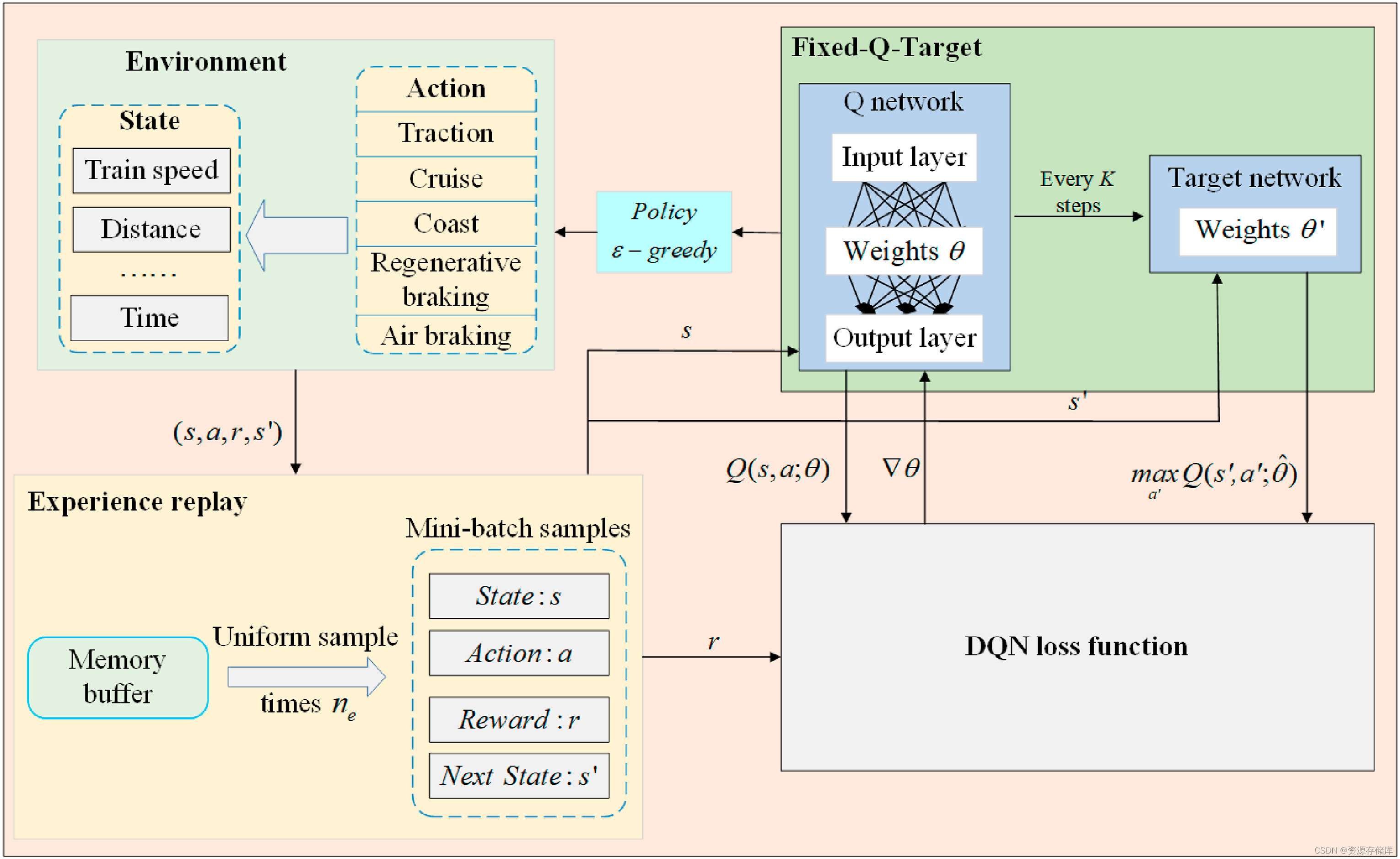
Fig. 7. Diagram of the state and action spaces for the cooperative control problem.
图 7.协作控制问题的状态和动作空间图。
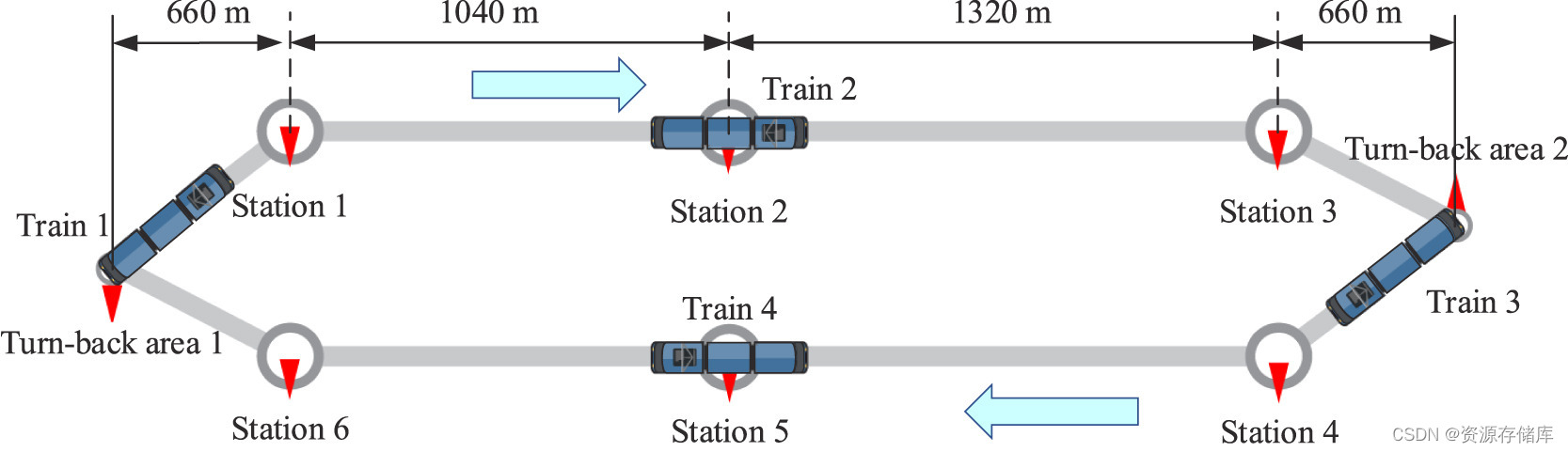
Fig. 9. Schematic diagram of the metro line.
图 9.地铁线路示意图。
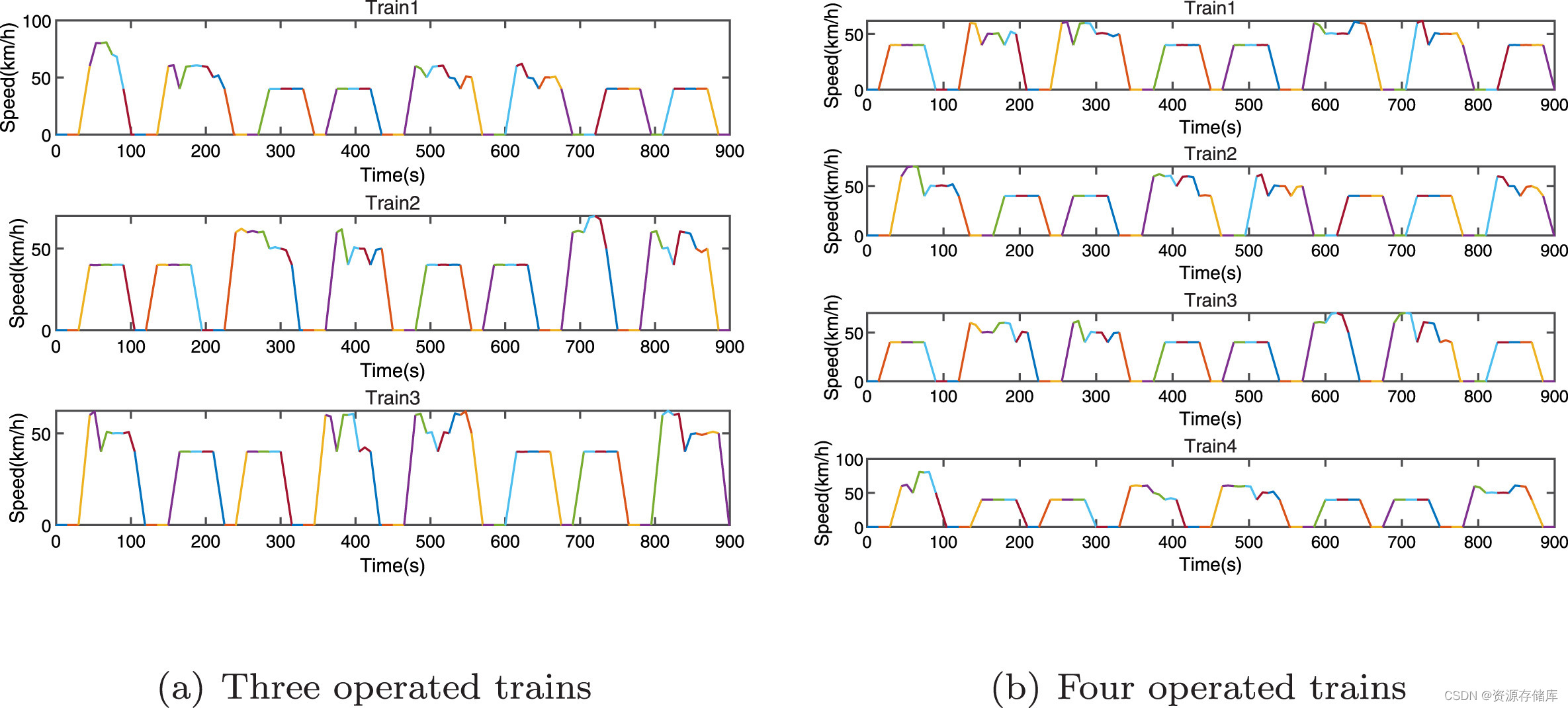
Fig. 11. Cooperated control strategy of trains by using the proposed method.
图 11.利用所提方法对列车进行协同控制。
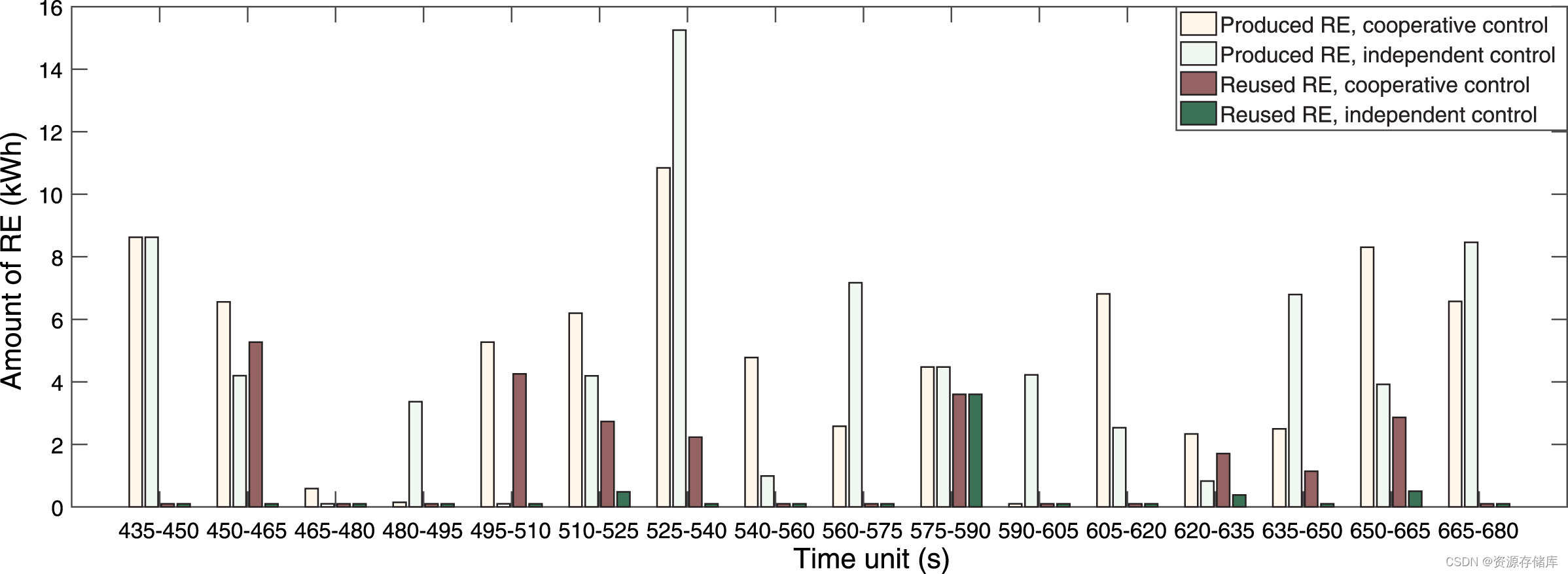
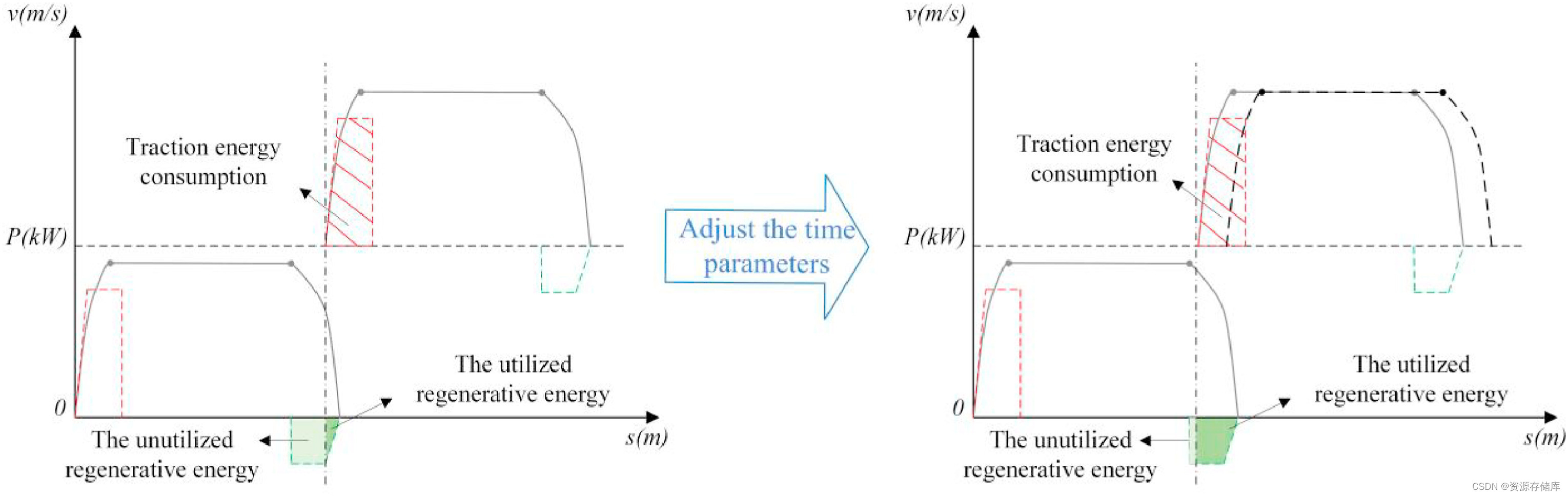
Fig. 12. Diagram of the produced RE and the reused RE in each time unit.
图 12.每个时间单位中产生的 RE 和重复使用的 RE 图。
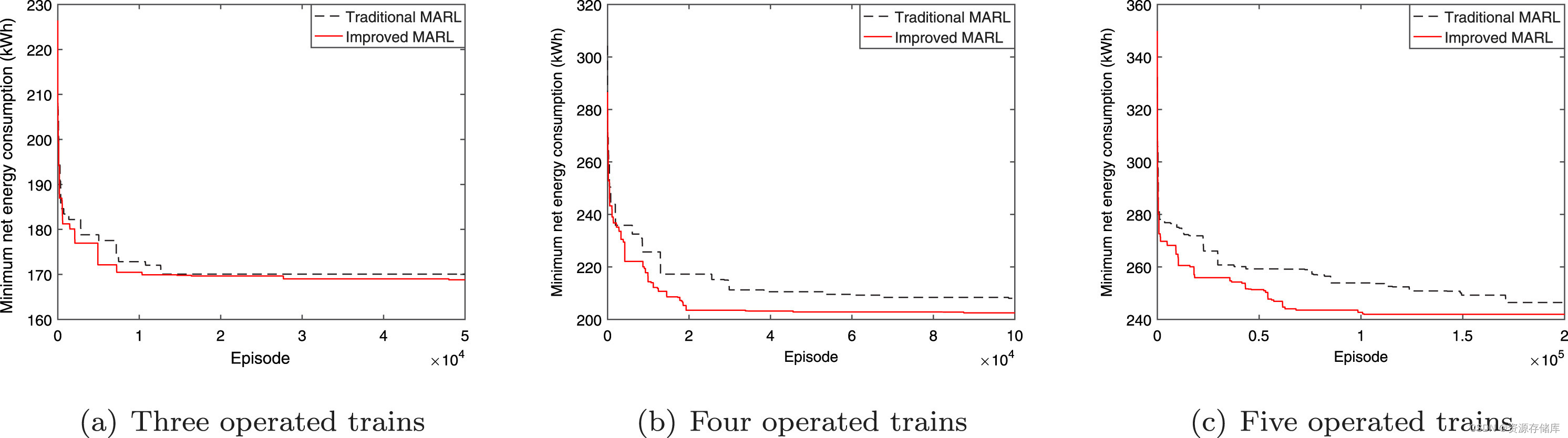
Fig. 13. Diagram of the minimum net energy consumption during the iteration process.
图 13.迭代过程中的最小净能耗图。
A robust train timetable optimization approach for reducing the number of waiting passengers in metro systems
一种强大的列车时刻表优化方法,可减少地铁系统中的等待乘客数量
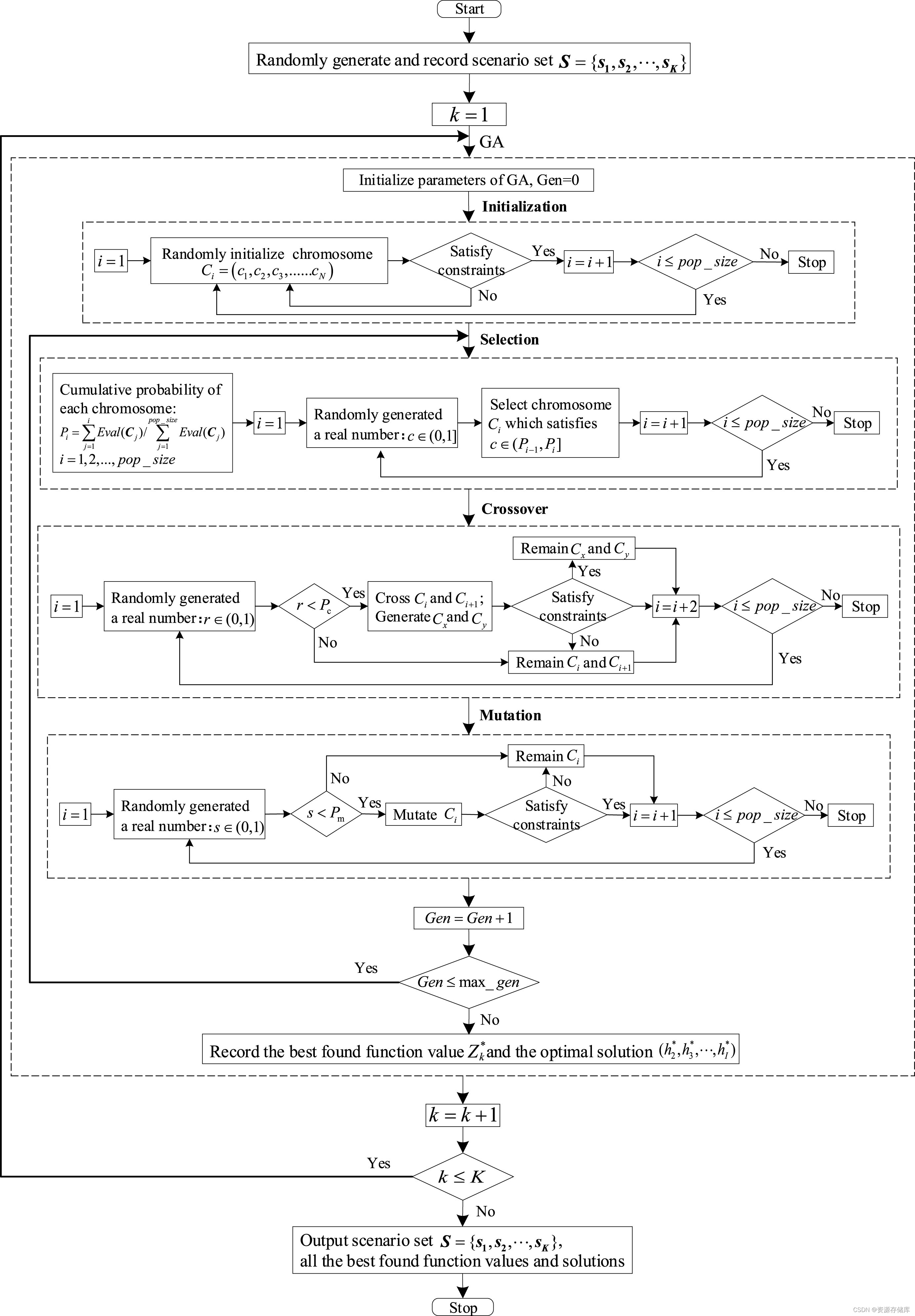
Fig. 1. Flow chart of the algorithm for solving the OFVM.
图 1.求解 OFVM 的算法流程图。
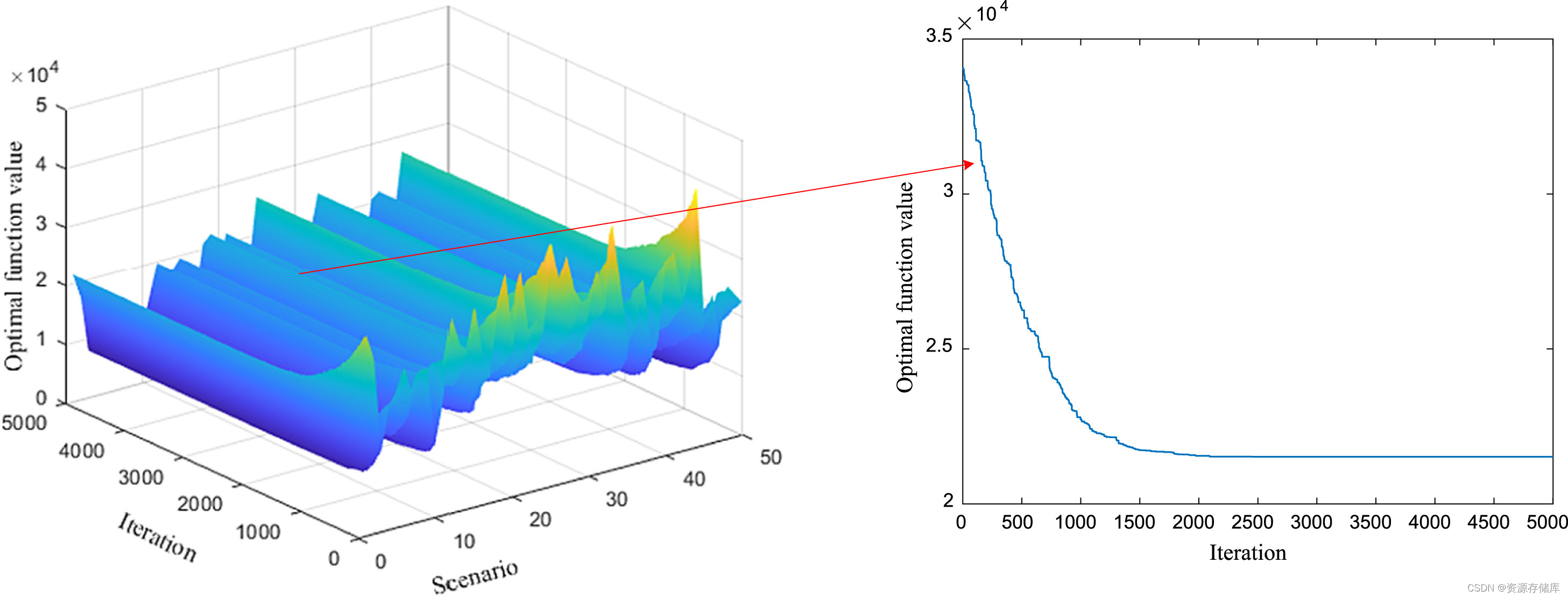
Fig. 7. Scenario-iteration-optimal function value.
图 7.场景迭代最优函数值。
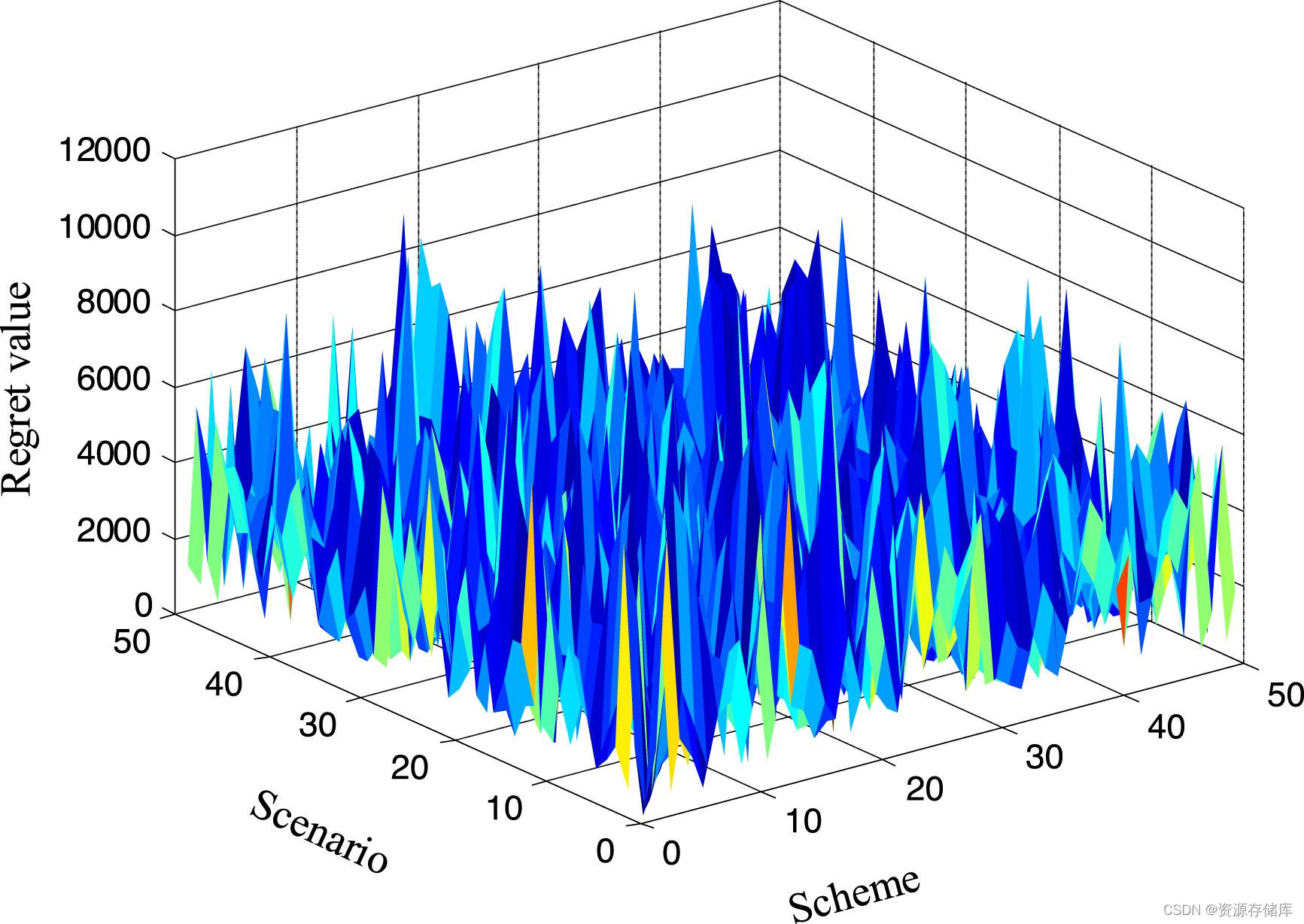
Fig. 8. Scheme-scenario-regret value.
图 8.方案-场景-遗憾值。
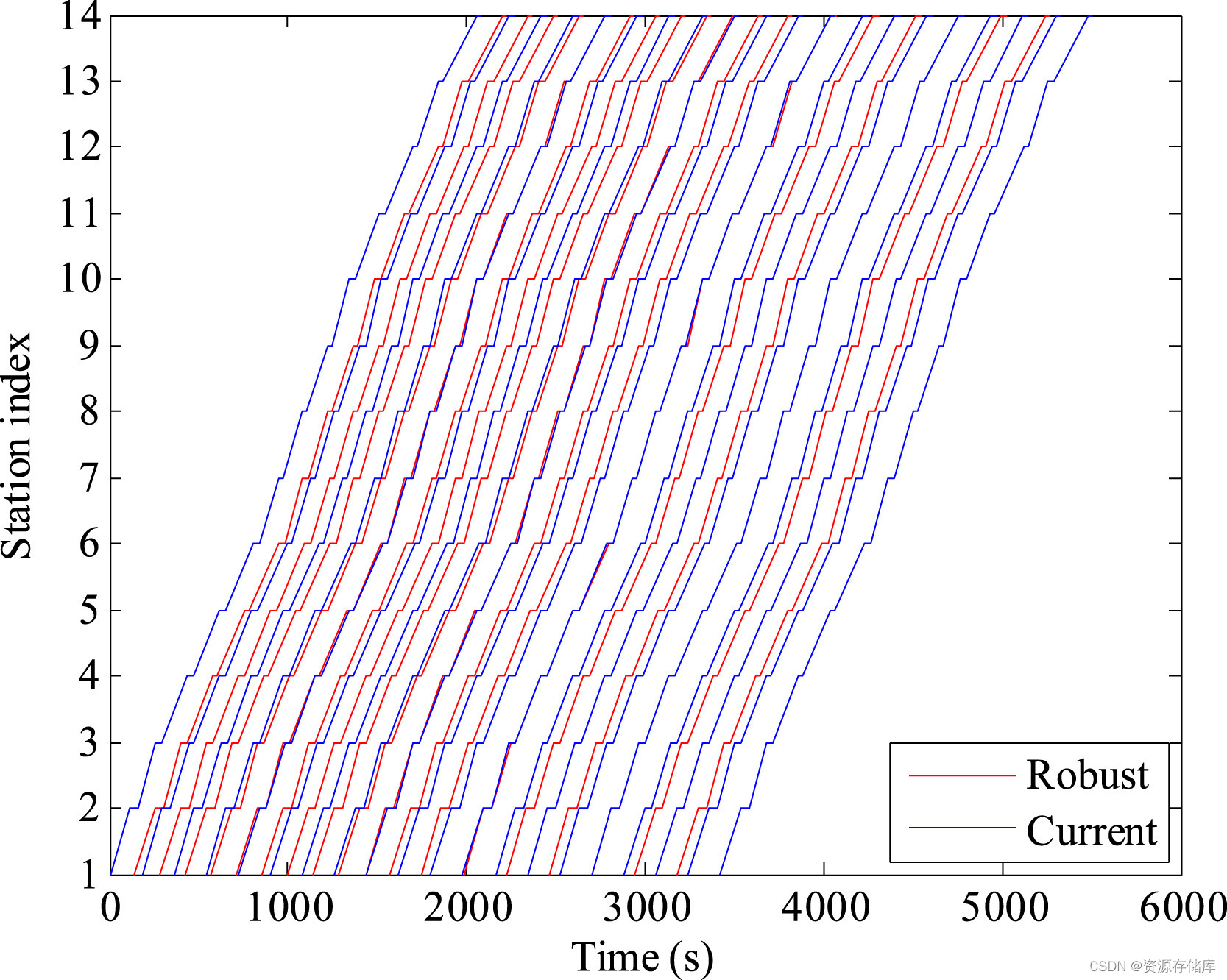
Fig. 12. Comparisons of the obtained robust timetable and the current timetable.
图 12.获得的稳健时间表和当前时间表的比较。
Train speed profile optimization with on-board energy storage devices: A dynamic programming based approach
采用车载储能装置的列车速度曲线优化:基于动态规划的方法
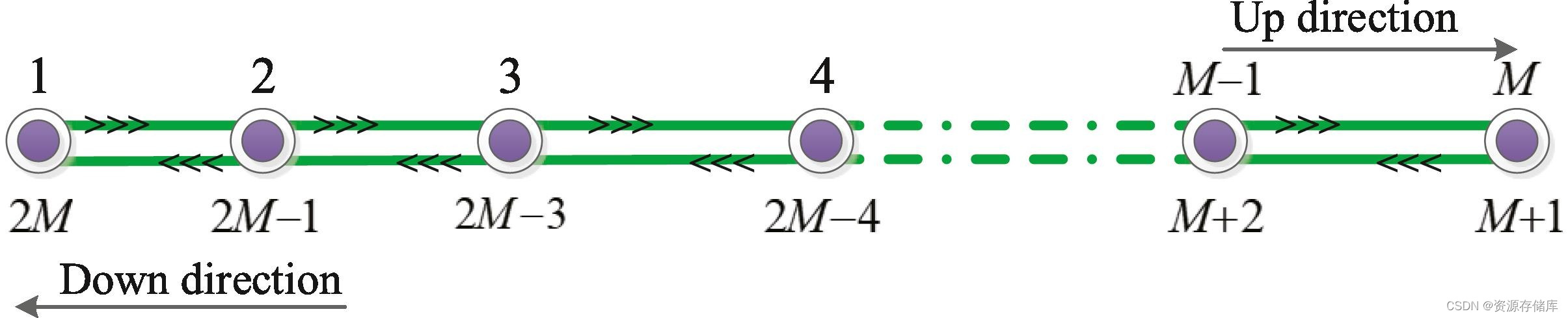
Fig. 1. The structure of transit line with 2M stations.
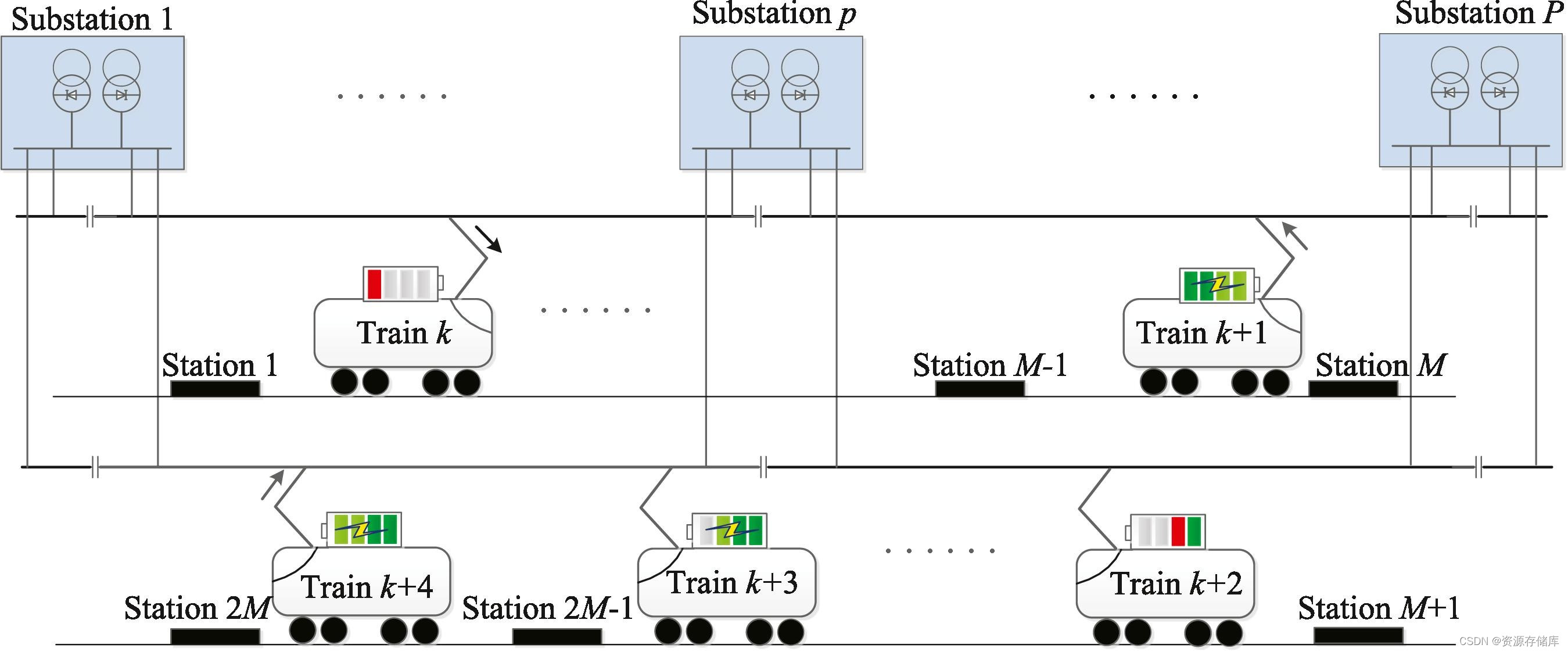
Fig. 2. Energy flow of five-trains with OBESDs on transit line at time t.
图2.在时间 t,运输线上带有OBESD的五列列车的能量流。
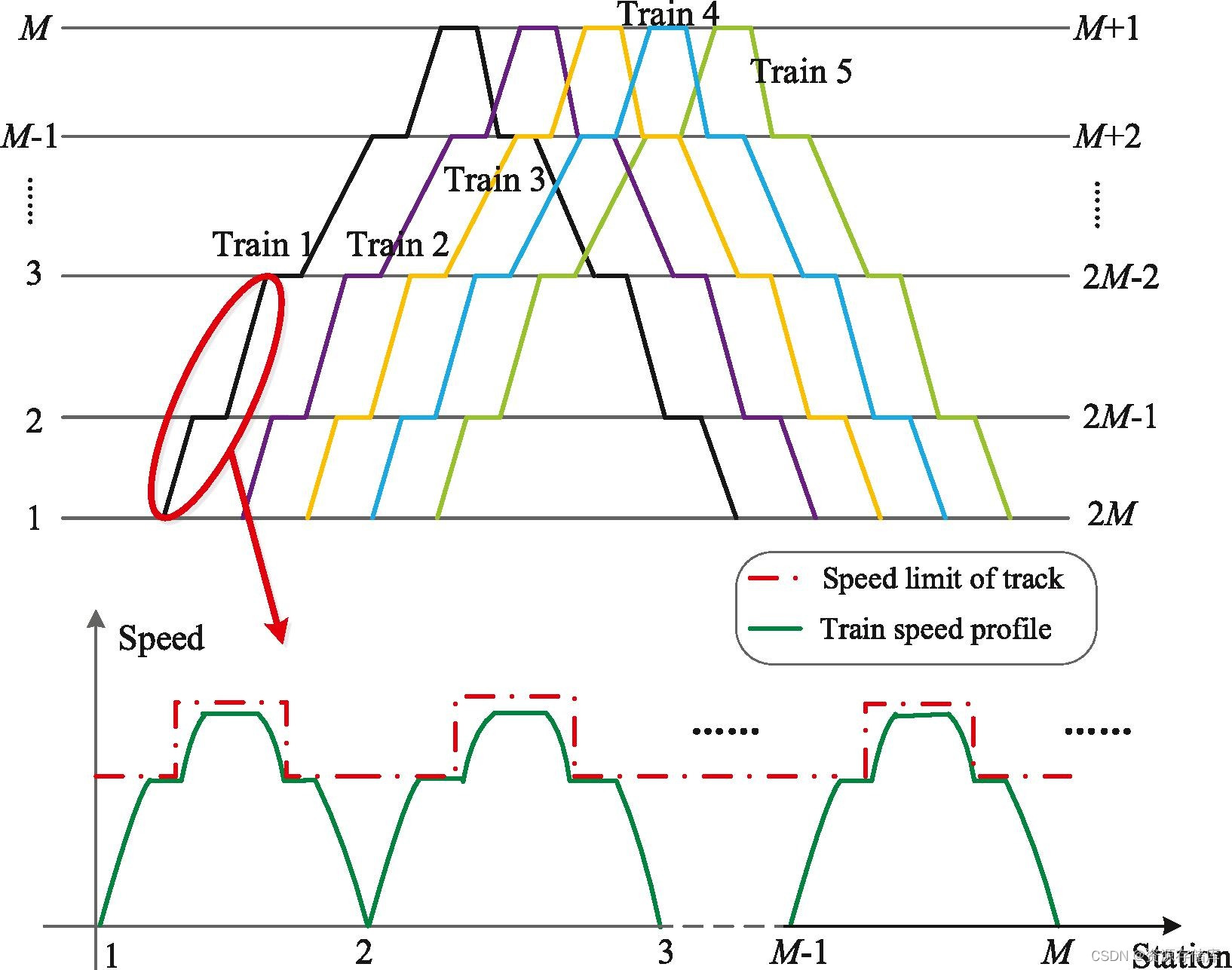
Fig. 3. Cooperative optimization of speed profile for train 1 over the transit line.
图三.轨道交通1号线列车速度剖面协同优化。
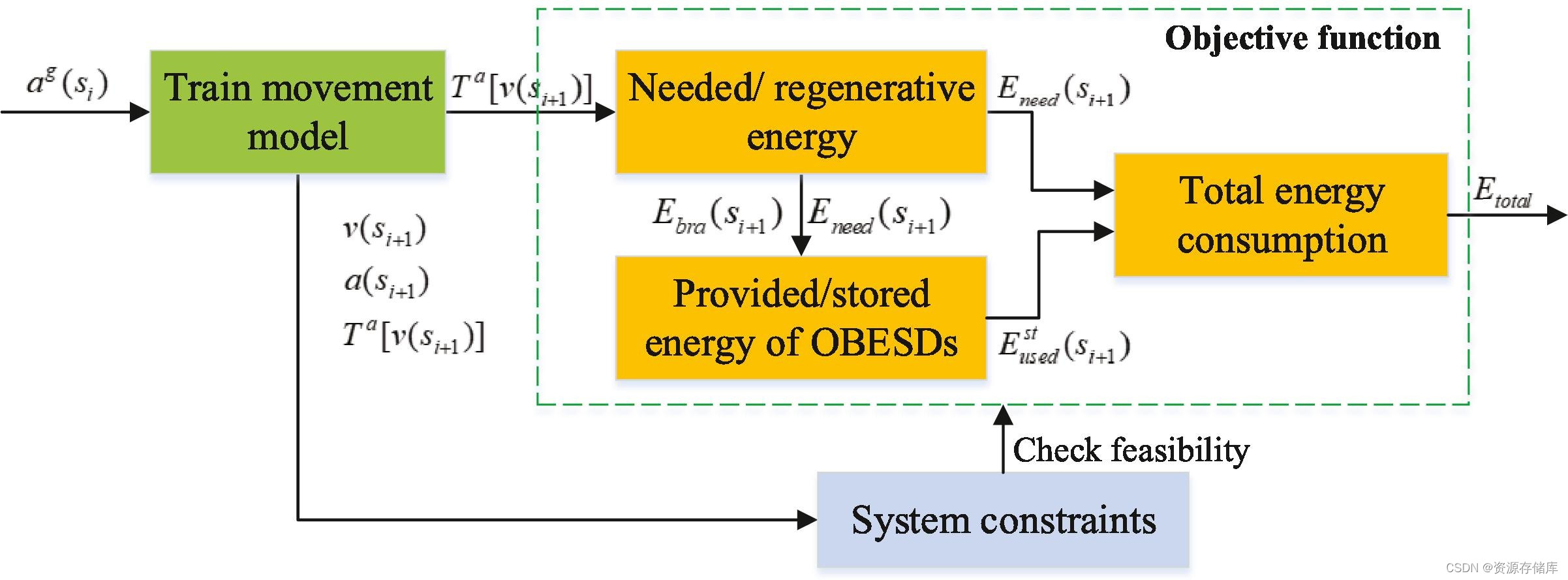
Fig. 4. Model structure with train movement model, energy consumption and system constraints.
图4.模型结构包括列车运行模型、能耗和系统约束。
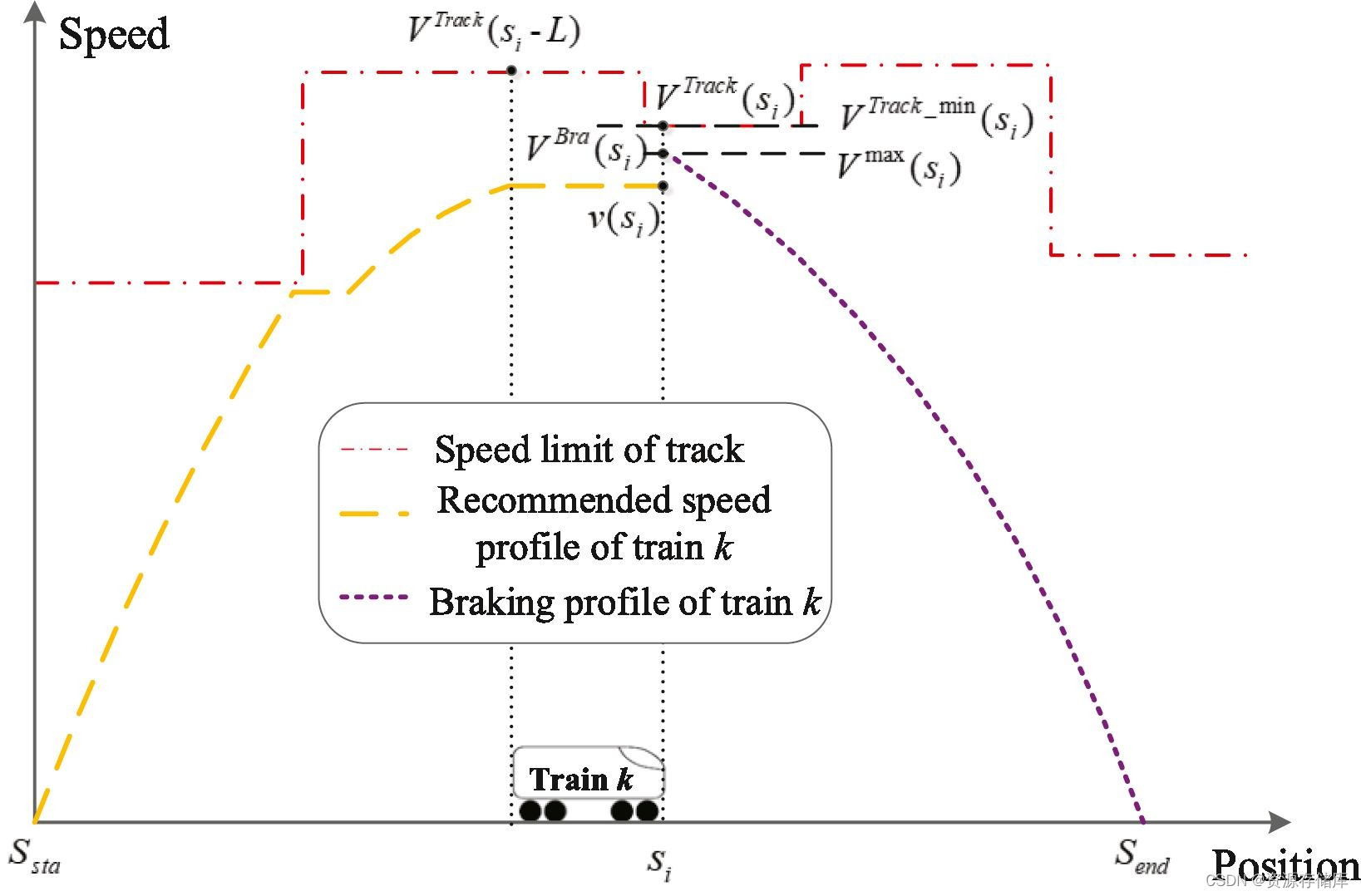
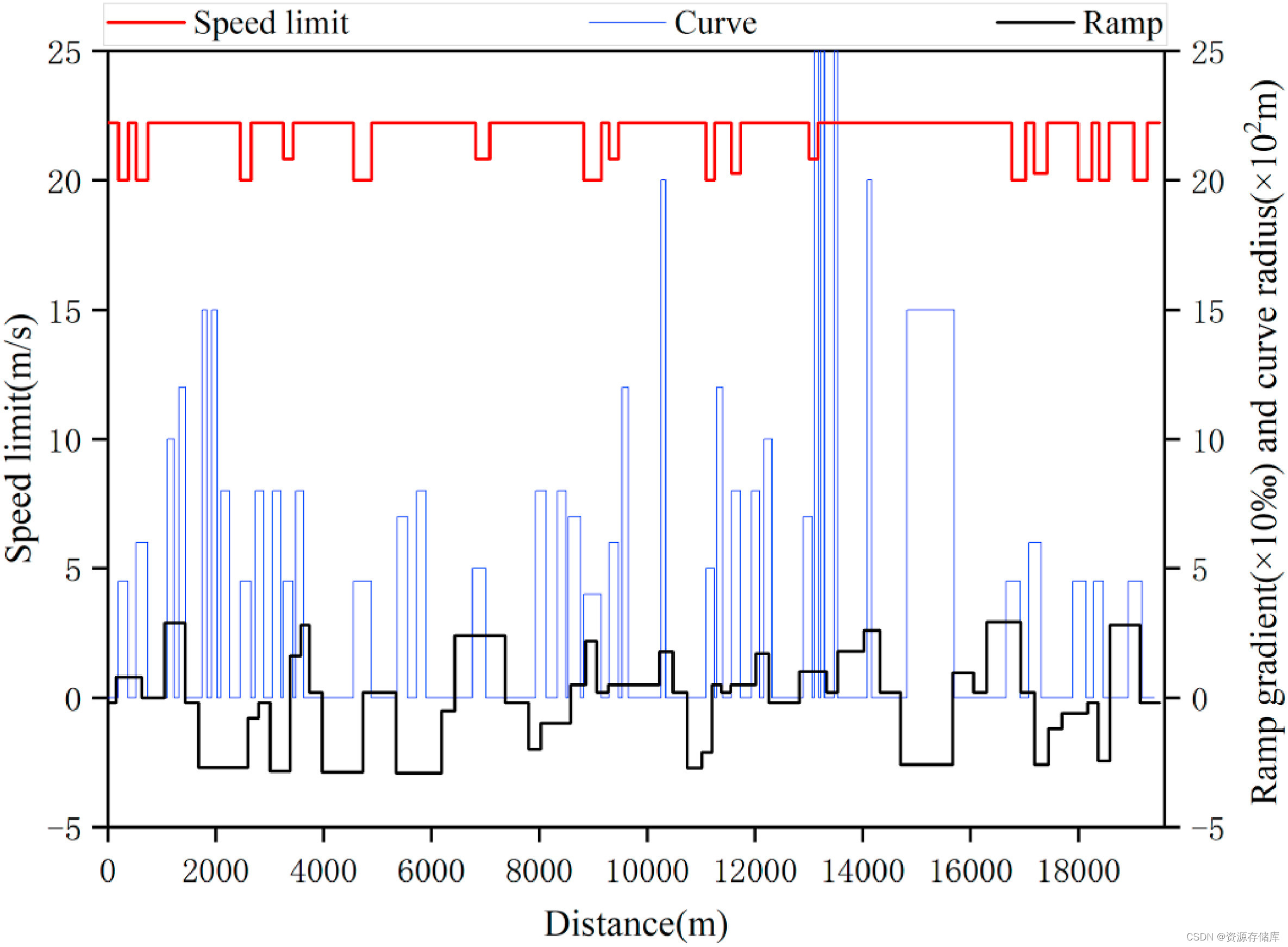
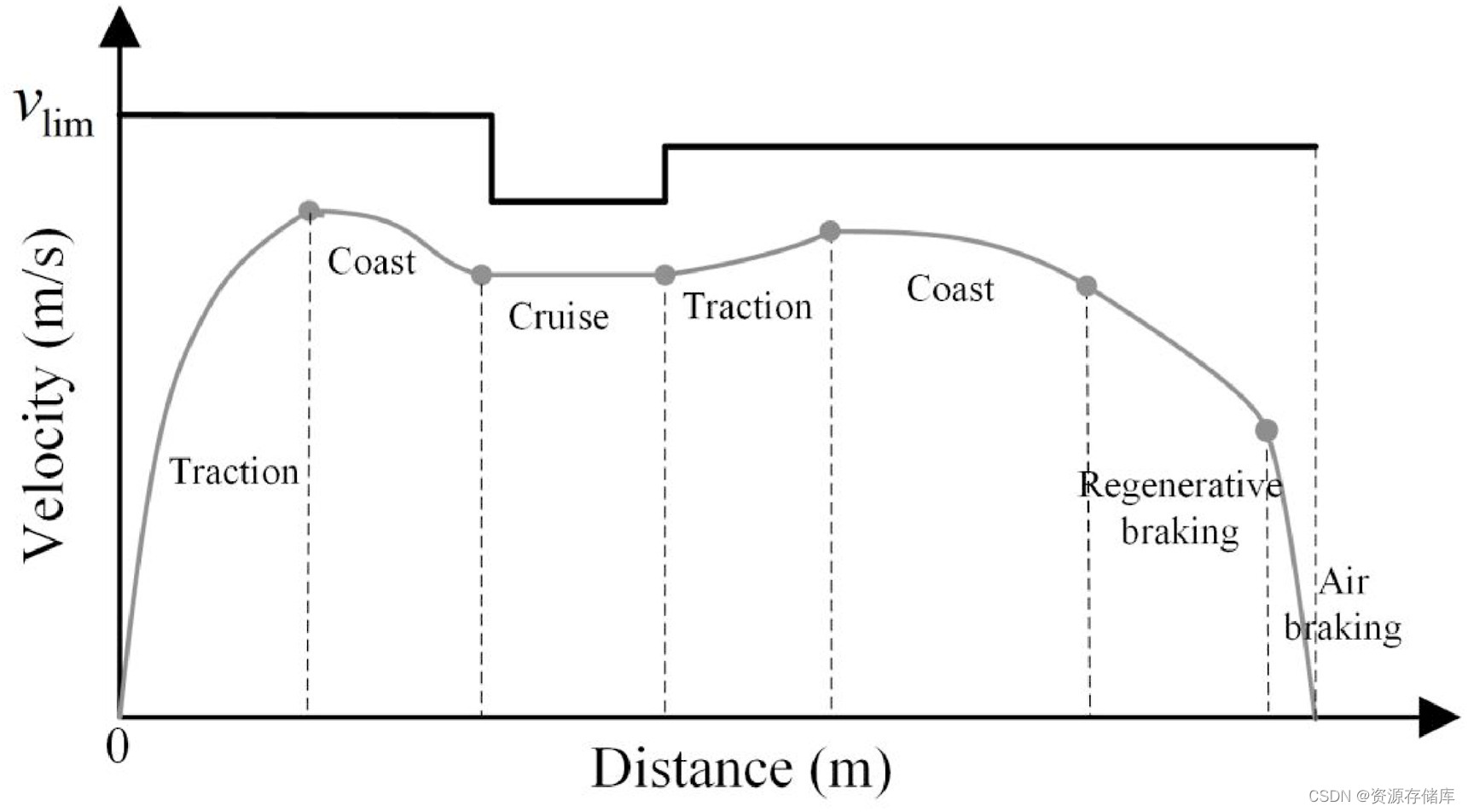
Fig. 5. The maximal allowable speed of train k at position s.
图5. 列车k在s位置的最大允许速度。

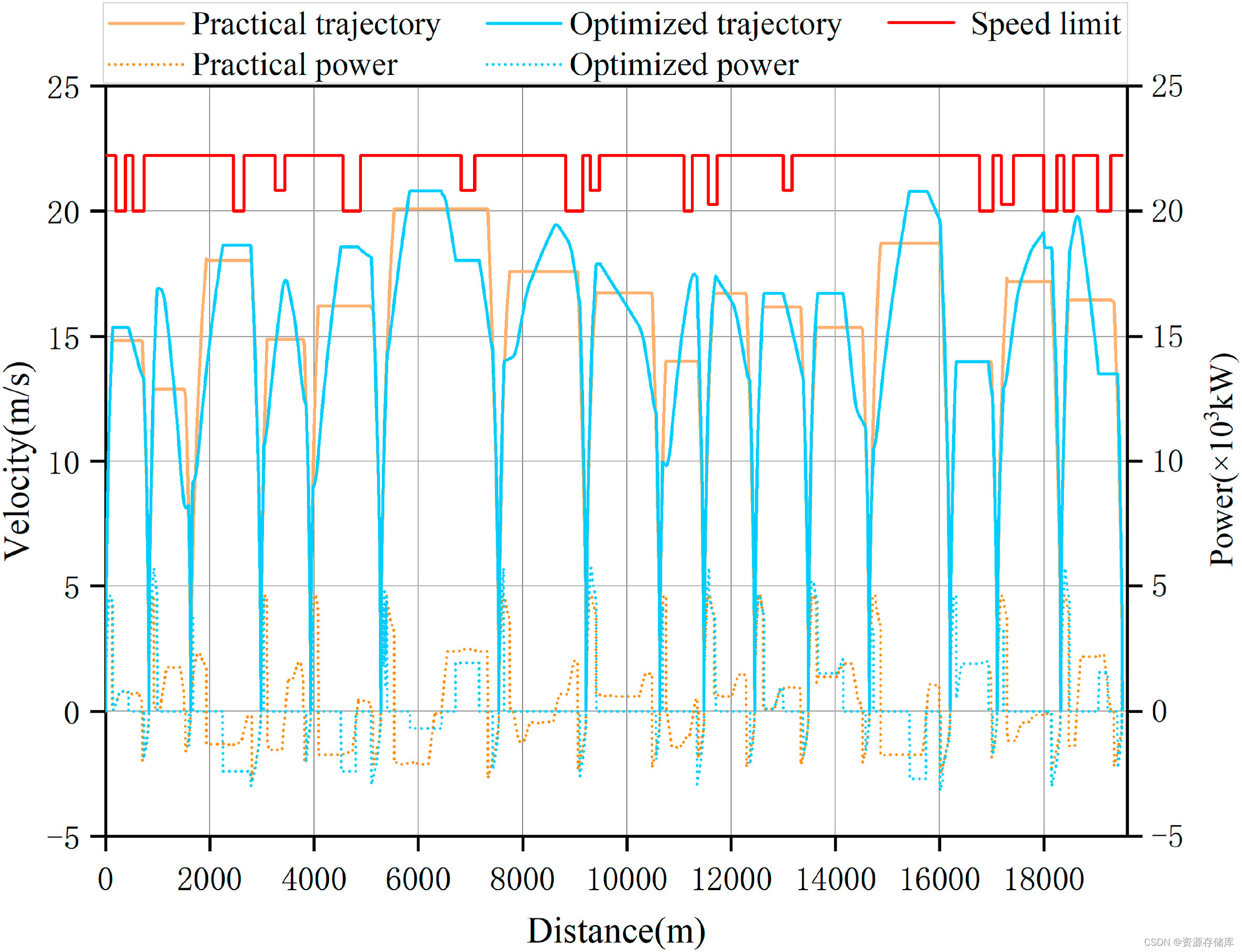
Fig. 6. Recommended speed profile optimization from station 1 to 3 by DP algorithm.
图6. 建议采用DP算法优化1号站至3号站的速度曲线。
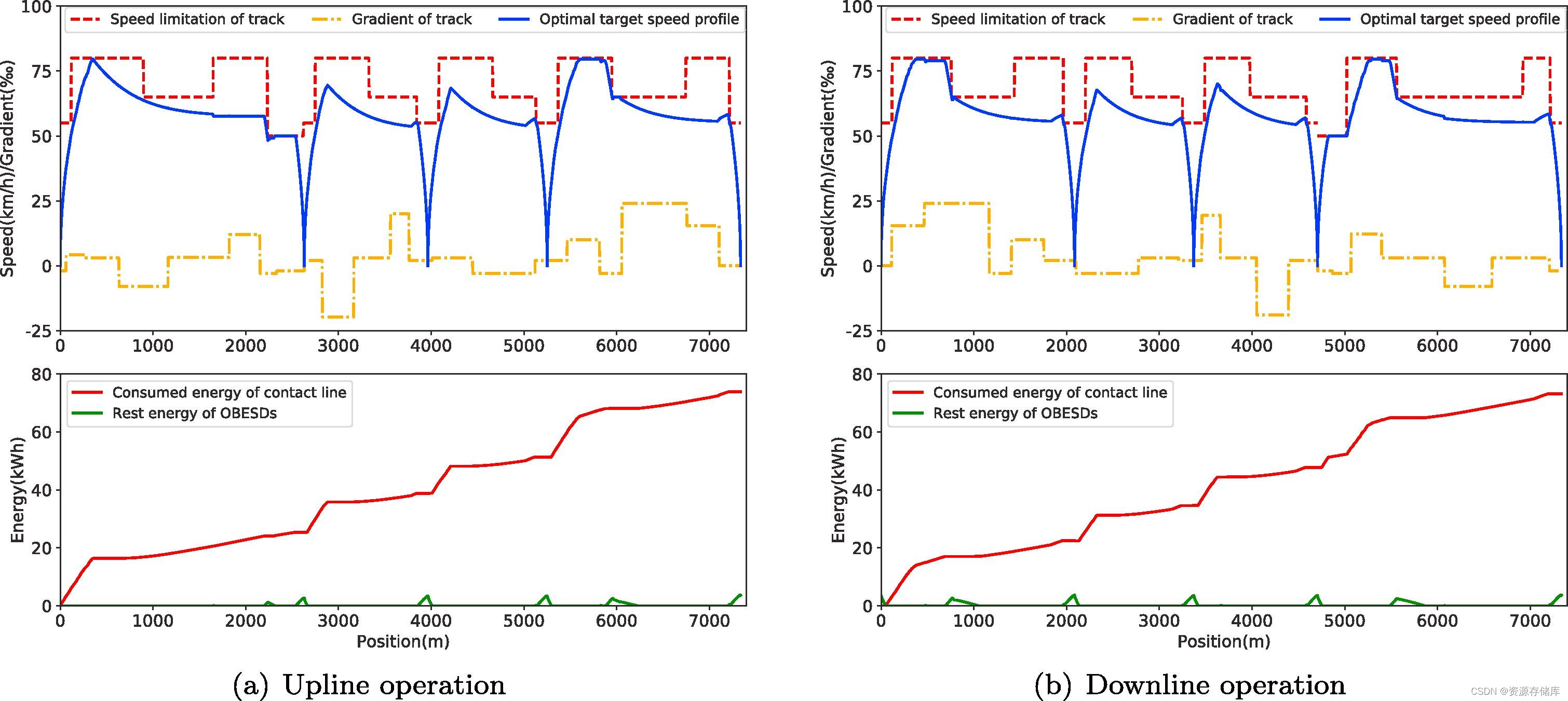
Fig. 7. Optimal speed profile and consumed energy of each train in upline/downline direction.
图7.上/下行方向各列车的最佳速度曲线和消耗能量。
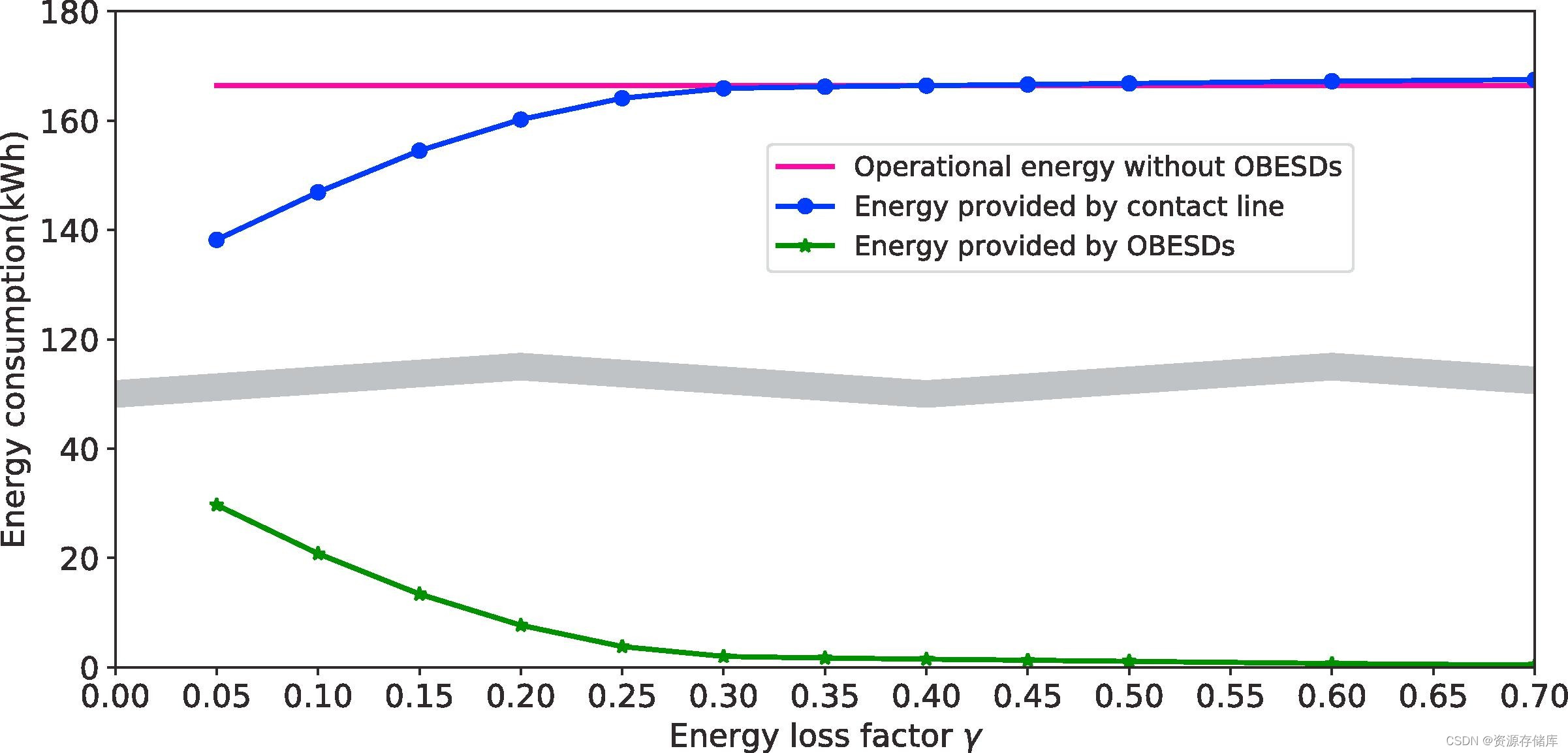
Fig. 8. Total energy consumption with different energy loss factors.
图8.不同能量损失系数下的总能量消耗。
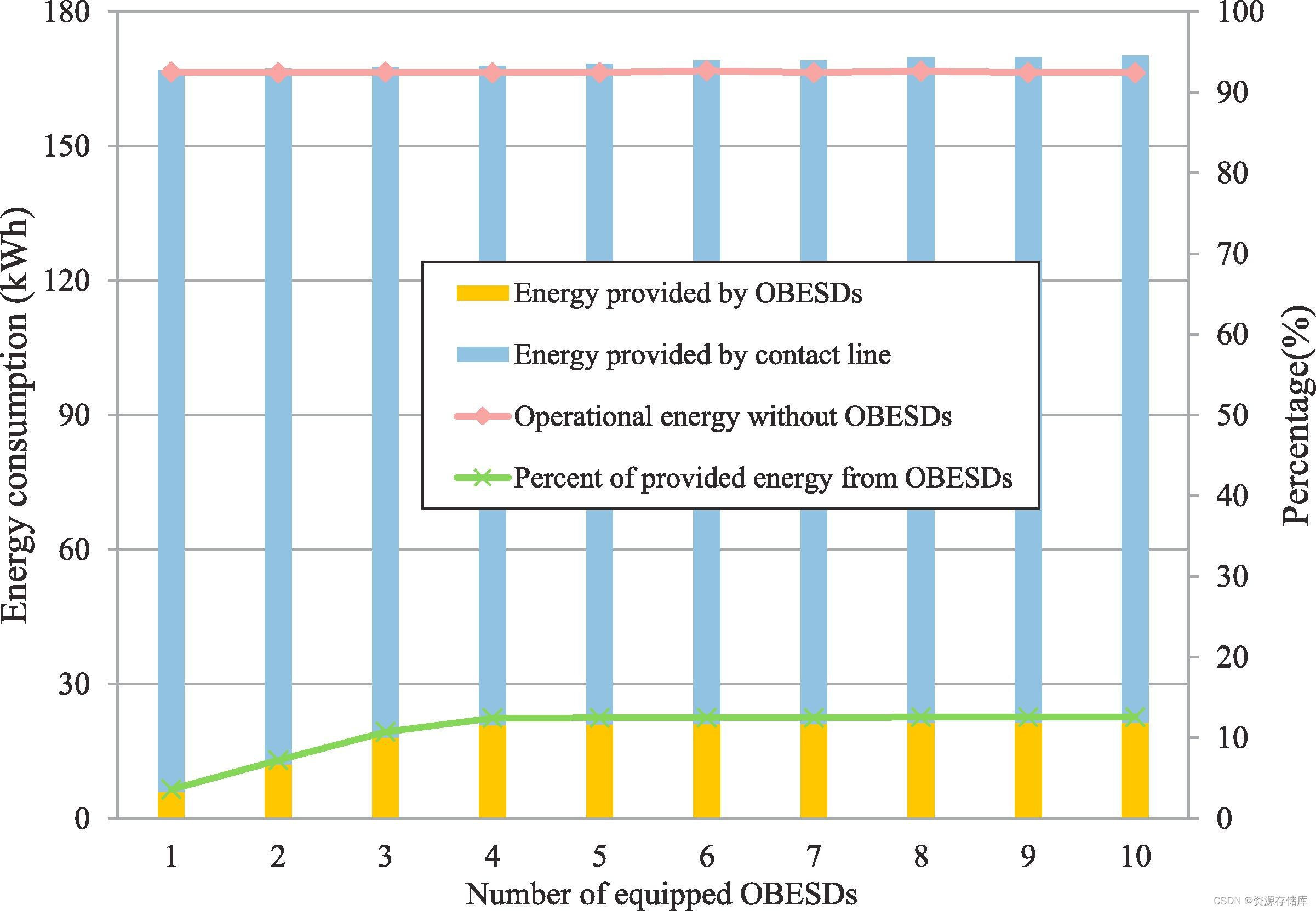
Fig. 9. The influence with respect to the total number of equipped OBESDs.
图9.对装备的OBESD总数的影响。
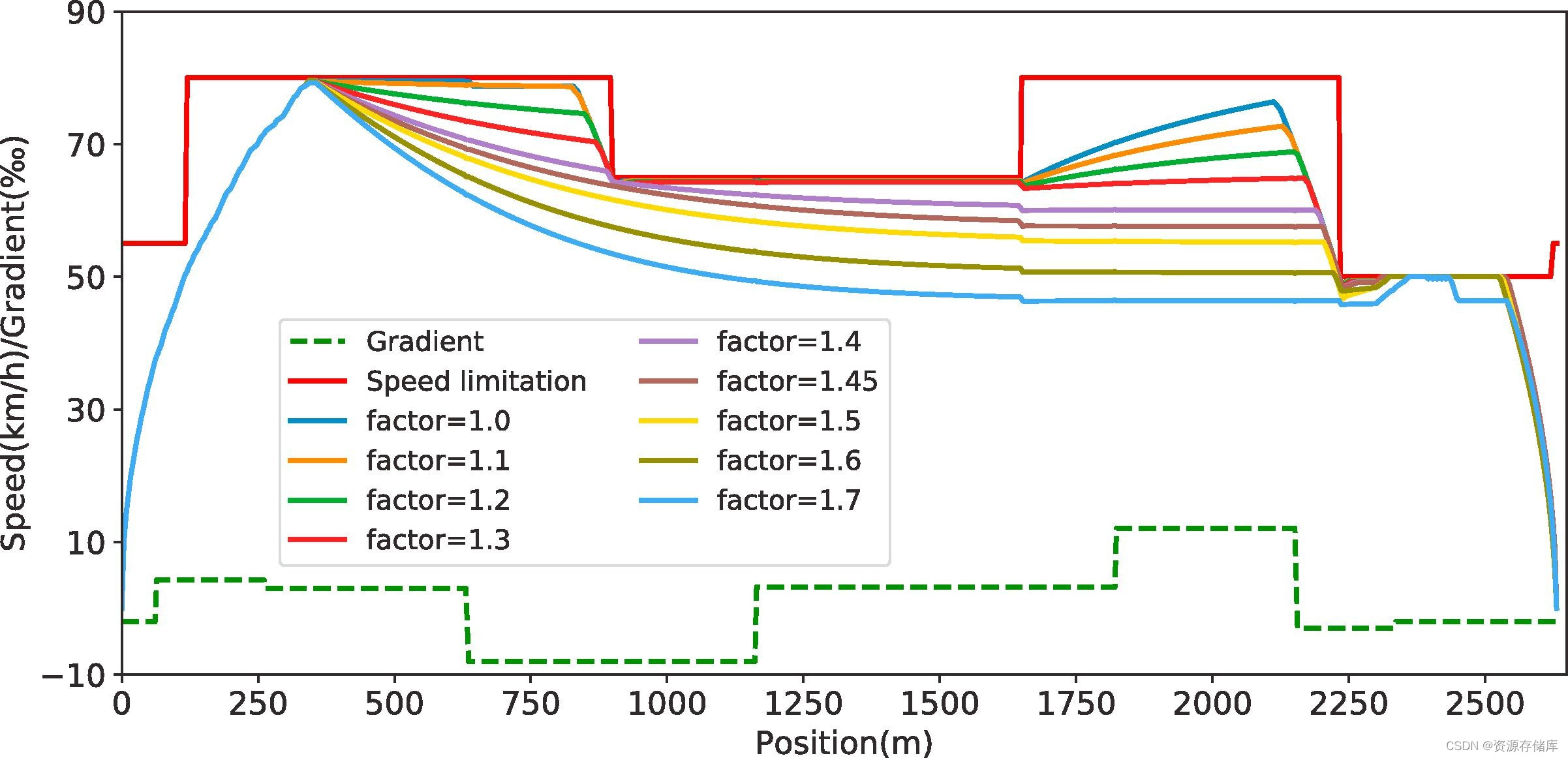
Fig. 10. The recommended speed profiles with variation of coasting/cruising factor in first inter-stations.
图10.在第一个站间的滑行/巡航系数变化的建议速度曲线。
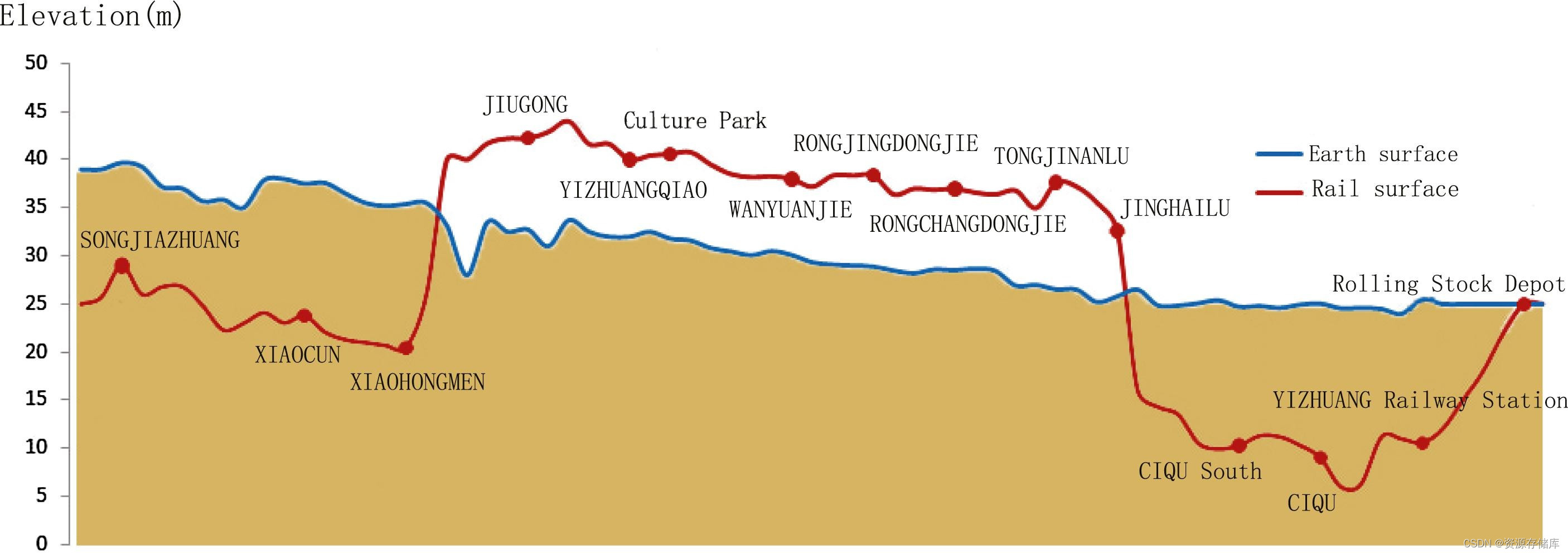
Fig. 11
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











