







ADC模数转换器
ADC简介
1.ADC 模拟-数字转换器
2.ADC 可以将引脚上连续变化的模拟电压转换为内存中存储的数字变量,建立模拟到数字电路的桥梁
3.12位逐次逼近型ADC,1us转换时间
4.输入电压:0~3.3V 转换结果范围:0~4095
5. 18个输入通道,可测量16个外部和2个内部信号源
6. 规则组和注入组两个转换单元
7. 模拟看门狗自动监测输入电压范围
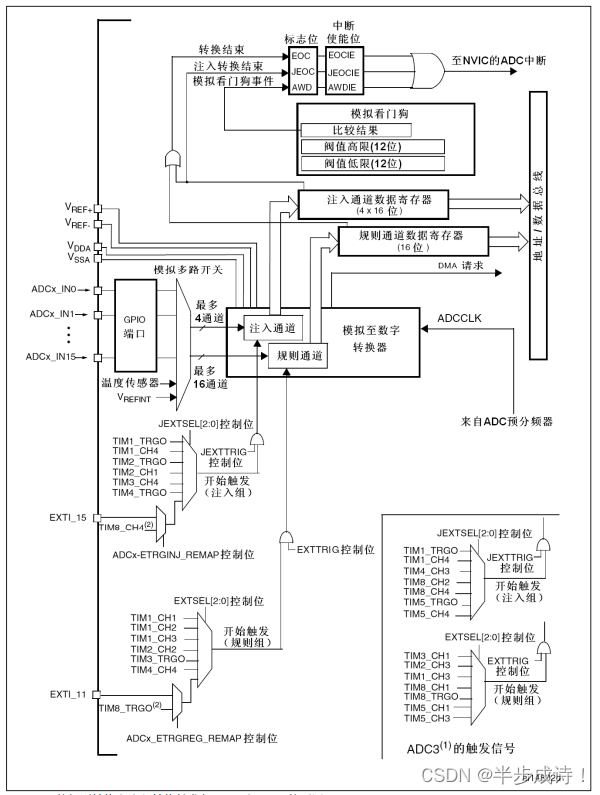
ADC框图
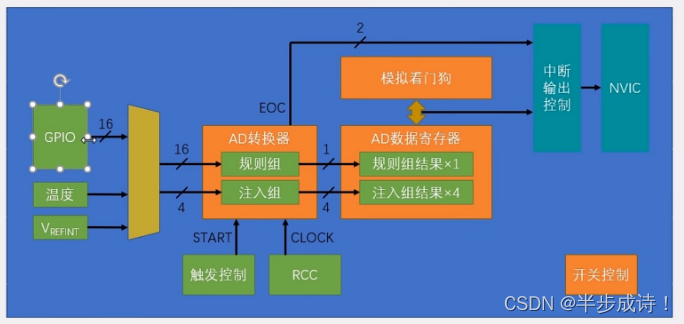
ADC基本结构
ADC转换模式
-
单次转换,非扫描模式
-
连续转换,非扫描模式
-
单次转换,扫描模式
-
连续转换,扫描模式
ADC数据对齐
-
数据右对齐

-
数据左对齐

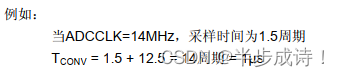
ADC转换时间
- AD转换的步骤:采样,保持,量化,编码

AD单通道
代码
单通道代码片。
// AD.c
#include "stm32f10x.h" // Device header
void AD_Init(void)
{
RCC_APB2PeriphClockCmd (RCC_APB2Periph_ADC1 , ENABLE);
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOA , ENABLE);
RCC_ADCCLKConfig (RCC_PCLK2_Div6);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init (GPIOA, &GPIO_InitStructure );
ADC_RegularChannelConfig(ADC1, ADC_Channel_0,1 ,ADC_SampleTime_55Cycles5);
ADC_InitTypeDef ADC_InitStructure;//单次 非扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd (ADC1 , ENABLE);
ADC_ResetCalibration(ADC1);//复位校准
while (ADC_GetResetCalibrationStatus(ADC1)==SET);//返回复位校准状态
ADC_StartCalibration (ADC1);//开始校准
while (ADC_GetCalibrationStatus(ADC1) == SET);//等待校准完成
}
uint16_t AD_GetValue(void)
{
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while (ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}
// main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"
uint16_t ADValue;
float Voltage;
int main(void)
{
OLED_Init();
AD_Init ();
OLED_ShowString (1,1,"ADValue:");
OLED_ShowString (2,1,"Voltage:0.00V");
while(1)
{
ADValue = AD_GetValue ();
Voltage = (float)ADValue / 4095 * 3.3;
OLED_ShowNum (1,9,ADValue , 4);
OLED_ShowNum (2,9,Voltage , 1);
OLED_ShowNum (2,11,(uint16_t)(Voltage *100)%100, 2);
Delay_ms (100);
}
}
AD多通道
// AD.C
#include "stm32f10x.h" // Device header
void AD_Init(void)
{
RCC_APB2PeriphClockCmd (RCC_APB2Periph_ADC1 , ENABLE);
RCC_APB2PeriphClockCmd (RCC_APB2Periph_GPIOA , ENABLE);
RCC_ADCCLKConfig (RCC_PCLK2_Div6);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AIN;
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1|GPIO_Pin_2 |GPIO_Pin_3;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init (GPIOA, &GPIO_InitStructure );
ADC_InitTypeDef ADC_InitStructure;//单次 非扫描模式
ADC_InitStructure.ADC_ContinuousConvMode = DISABLE;
ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right;
ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None;
ADC_InitStructure.ADC_Mode = ADC_Mode_Independent;
ADC_InitStructure.ADC_ScanConvMode = DISABLE;
ADC_InitStructure.ADC_NbrOfChannel = 1;
ADC_Init(ADC1, &ADC_InitStructure);
ADC_Cmd (ADC1 , ENABLE);
ADC_ResetCalibration(ADC1);//复位校准
while (ADC_GetResetCalibrationStatus(ADC1)==SET);//返回复位校准状态
ADC_StartCalibration (ADC1);//开始校准
while (ADC_GetCalibrationStatus(ADC1) == SET);//等待校准完成
}
uint16_t AD_GetValue(uint8_t ADC_Channel)
{
ADC_RegularChannelConfig(ADC1, ADC_Channel,1 ,ADC_SampleTime_55Cycles5);
ADC_SoftwareStartConvCmd(ADC1,ENABLE);
while (ADC_GetFlagStatus(ADC1,ADC_FLAG_EOC) == RESET);
return ADC_GetConversionValue(ADC1);
}
```javascript
// main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "AD.h"
uint16_t AD0,AD1,AD2,AD3;
int main(void)
{
OLED_Init();
AD_Init ();
OLED_ShowString (1,1,"AD0:");
OLED_ShowString (2,1,"AD1:");
OLED_ShowString (3,1,"AD2:");
OLED_ShowString (4,1,"AD3:");
while(1)
{
AD0 = AD_GetValue (ADC_Channel_0);
AD1 = AD_GetValue (ADC_Channel_1);
AD2 = AD_GetValue (ADC_Channel_2);
AD3 = AD_GetValue (ADC_Channel_3);
OLED_ShowNum (1,5,AD0 ,4);
OLED_ShowNum (2,5,AD0 ,4);
OLED_ShowNum (3,5,AD0 ,4);
OLED_ShowNum (4,5,AD0 ,4);
Delay_ms (100);
}
}















 2199
2199











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









