







1.简介
布料仿真中我们通常将布料离散化为三角网格或四边形网格,并用弹簧质点模型对其建模,最终得到如下的动力学方程:
{x˙=vMv˙=Fexternal+Finternal
根据内力的表示 Finternal 的表示不同,可分别到得到(1)基于惩罚力(penalty force)的动力学方程:
{x˙=vMv˙=Fexternal−kJTc(x)
(2)基于约束力(constraint force)的动力学方程:
⎧⎩⎨x˙=vMv˙=Fexternal+JTλc(x)=0
其中, J=∇c(x) , c(x) 是约束,例如形如 c(x1,x2)=||x1−x2||−l0=0 的距离约束。
这篇文章通过令约束力(constraint force)与惩罚力(penalty force)相等,得到如下动力学方程(称之为 soft constrained dynamics):
⎧⎩⎨x˙=vMv˙=Fext+JTλαλ(x,t)=−c(x)−βc˙(x)
并用类似于Symplectic Euler的方法进行求解。
2.求 λ 的区间均值
用
λ
在
[t,t+Δt]
(实际上应该是
[tn,tn+Δt]
,所以论文里的积分上下限也写错了,下面的是更正后的)的均值
λ~
代替
λ
,
λ~=Δt−1∫tn+Δttnα−1(c+βc˙)dt
将
c(x)
在
tn
处做一阶泰勒展开,得到,
c(x)=cn+c˙(t−tn)
,则,
λ~=Δt−1α−1∫tn+Δttn[cn+c˙|n(t−tn)+βc˙]dt
c˙=JTV 是 c 对时间求导,令
λ~=Δt−1α−1(Δtcn+12Δt2c˙|n+βΔtc˙|n)=α−1(cn+(12Δt+β)JTnVn+1)
其中, c˙|n=JTnVn+1 ( 我也不知道为什么不是 Vn )令, γ=(12Δt+β)−1 ,则,
αλ~=cn+γ−1JTnVn+1
最终得到如下方程,
[MJn−JTnγαΔt−1][Vn+1Δtλ~]=[MVn+ΔtFn−γCn]
实际中,我们会固定一些点,这一般通过令固定点的质量无穷大实现,而计算机中无法表示数学意义上的无穷大,因此使用质量的逆等于0来等价表示。因此通常我们都会让公式只出现质量的逆矩阵
M−1
(由于
M
是对角矩阵,求逆耗时很少,而且是once and for all的工作),因此上式改写成如下形式:
注意,在我的实际操作中,求解这个矩阵只能用LU分解,Eigen库的Conjugate Gradient和SimplicialLDLT都会导致结果不正确。
3.Schur complement
根据上面得到的正确系数矩阵,可得到其舒尔补(Schur complement)为,
Sn=JnM−1JTn−Δt−1γα
Snλ~=−Δt−1JnVn−JnM−1Fn−γΔt−1Cn
其中, Fn 表示非约束力之外的力。最终得到速度和位置的更新公式:
{xn+1=xn+Δtvn+1vn+1=vn+hM−1Fn+hM−1JTnλ~
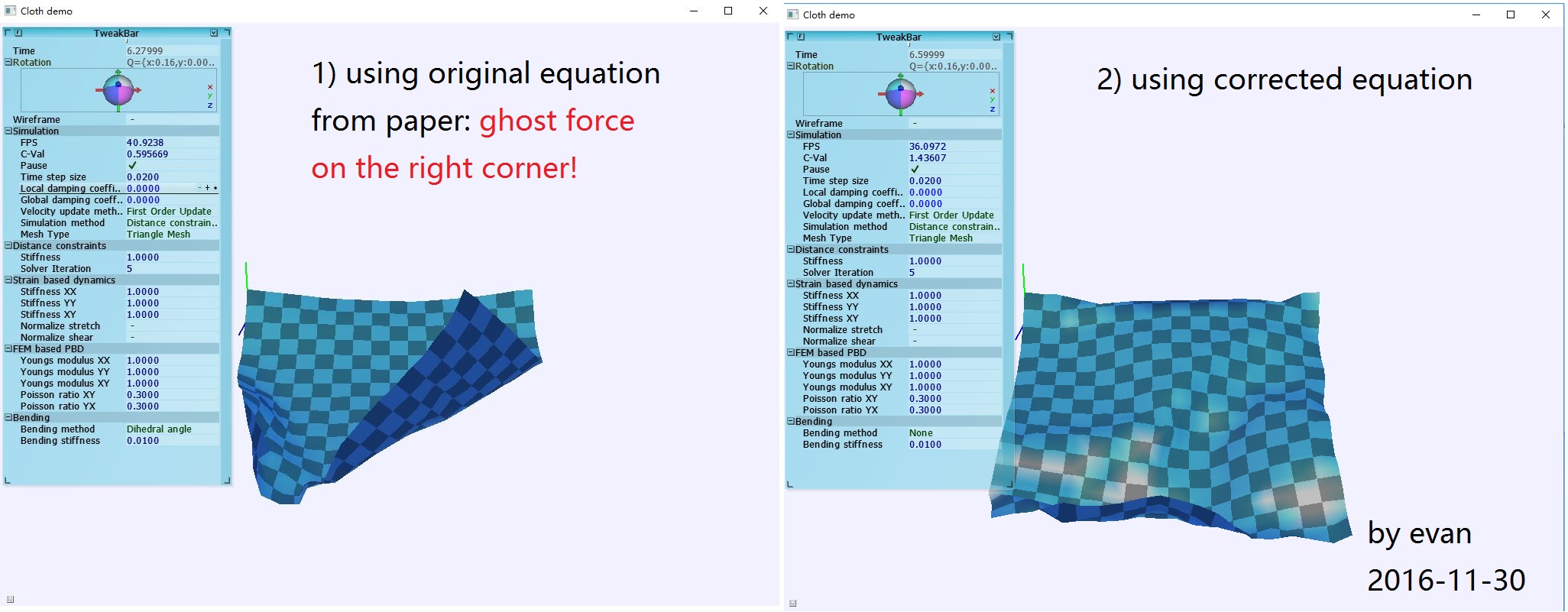
如果使用原来错误的公式,仿真一块两点固定的布料时,布料的右侧会出现ghost force:不正常的被向前拉。而使用纠正后的公式表现正常。如下图所示:
4.总结
- 本文纠正了论文Interactive Simulation of Elastic Deformable Materials公式推导的错误,给出了写程序时应该使用的求解方法建议。
- 有关基于约束的动力学(constrained dynamics)的推导和求解,如果有人感兴趣可以在下面留言,有机会我会介绍。
- 本文所讲的论文(06年发表)提出了soft constraint(这篇论文里称之为regularized constraint),15年,16年都有论文重新讲述soft constraint的求解,以及如何应用到PBD(position based dynamics)上。同样的,感兴趣的可以在下面留言,有机会我会介绍。
- 在实际求解中我发现对于不同的稀疏系数矩阵,需要使用不同的求解方法(我用的是Eigen),否则得不到解,具体原因之后会详细给出。
- 截图使用的仿真环境为GitHub上PBD原作者公布的源代码:https://github.com/InteractiveComputerGraphics/PositionBasedDynamics.















 96
96

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









