






 本文详细介绍了张正友标定法的必要性、原理,包括如何通过求解内参矩阵和外参矩阵来建立相机成像模型,矫正畸变。步骤涉及求解单应性矩阵、内参矩阵和外参矩阵的过程。
本文详细介绍了张正友标定法的必要性、原理,包括如何通过求解内参矩阵和外参矩阵来建立相机成像模型,矫正畸变。步骤涉及求解单应性矩阵、内参矩阵和外参矩阵的过程。
参考文章:
相机标定之张正友标定法数学原理详解(含python源码) - 知乎【关于问题】 由于问题过多,不一一回复,望理解。 涉及到撰写错误的,我会认真推导并回复。涉及到一些基本概念或者定义的,评论区几句话难以说清楚,可以私戳我。涉及到代码输出值的,建议查询opencv的docs。 一… https://zhuanlan.zhihu.com/p/94244568【一文弄懂】张正友标定法-完整学习笔记-从原理到实战_hehedadaq的博客-CSDN博客张正友标定法-完整学习笔记-从原理到实战文章目录张正友标定法-完整学习笔记-从原理到实战(零)前言:1 为什么需要标定?2 相机标定的已知条件和待求解是什么?标定前的已知条件:待求信息:(一)概念介绍和成像几何模型1.张正友标定处于什么水平,为啥提到相机标定,就不得不提他张博士的方法?2 简单介绍张博士----张氏标定法发明人3【WHY:为什么要进行相机标定?】4【HOW:相机标定的原理】在这里..._张正友标定法-完整学习笔记-从原理到实战
https://zhuanlan.zhihu.com/p/94244568【一文弄懂】张正友标定法-完整学习笔记-从原理到实战_hehedadaq的博客-CSDN博客张正友标定法-完整学习笔记-从原理到实战文章目录张正友标定法-完整学习笔记-从原理到实战(零)前言:1 为什么需要标定?2 相机标定的已知条件和待求解是什么?标定前的已知条件:待求信息:(一)概念介绍和成像几何模型1.张正友标定处于什么水平,为啥提到相机标定,就不得不提他张博士的方法?2 简单介绍张博士----张氏标定法发明人3【WHY:为什么要进行相机标定?】4【HOW:相机标定的原理】在这里..._张正友标定法-完整学习笔记-从原理到实战 https://blog.csdn.net/hehedadaq/article/details/105763241?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169518656516800227425227%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169518656516800227425227&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-1-105763241-null-null.142%5Ev94%5EchatsearchT3_1&utm_term=%E5%BC%A0%E6%AD%A3%E5%8F%8B%E6%A0%87%E5%AE%9A%E6%B3%95-%E5%AE%8C%E6%95%B4%E5%AD%A6%E4%B9%A0%E7%AC%94%E8%AE%B0-%E4%BB%8E%E5%8E%9F%E7%90%86%E5%88%B0%E5%AE%9E%E6%88%98&spm=1018.2226.3001.4187经学习后,我对张正友平面标定法简单理解如下:
https://blog.csdn.net/hehedadaq/article/details/105763241?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522169518656516800227425227%2522%252C%2522scm%2522%253A%252220140713.130102334..%2522%257D&request_id=169518656516800227425227&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~top_positive~default-1-105763241-null-null.142%5Ev94%5EchatsearchT3_1&utm_term=%E5%BC%A0%E6%AD%A3%E5%8F%8B%E6%A0%87%E5%AE%9A%E6%B3%95-%E5%AE%8C%E6%95%B4%E5%AD%A6%E4%B9%A0%E7%AC%94%E8%AE%B0-%E4%BB%8E%E5%8E%9F%E7%90%86%E5%88%B0%E5%AE%9E%E6%88%98&spm=1018.2226.3001.4187经学习后,我对张正友平面标定法简单理解如下:
一、为什么要进行相机标定?
相机标定的最终目的是建立二维像素与对应的三维实物的关系;直接目的是建立相机成像几何模型并矫正透镜畸变,求解相机的内参、外参和畸变参数,张正友平面标定法为其中一种求解方法。
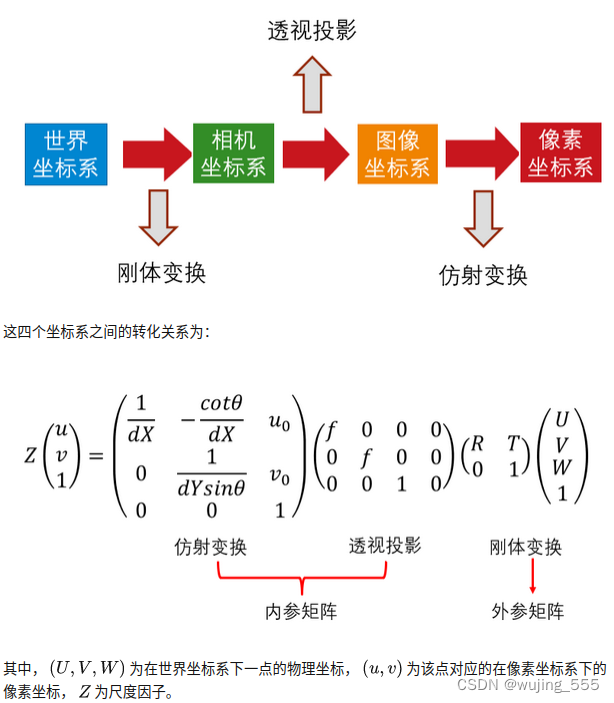
二、张正友平面标定法思路
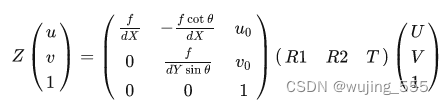
第一步:求解内参矩阵与外参矩阵的积
注意:此时已知像素坐标(u、v)和实物坐标(U、V)(棋盘格是设定好的,包括假设世界坐标系原点和格子边长)
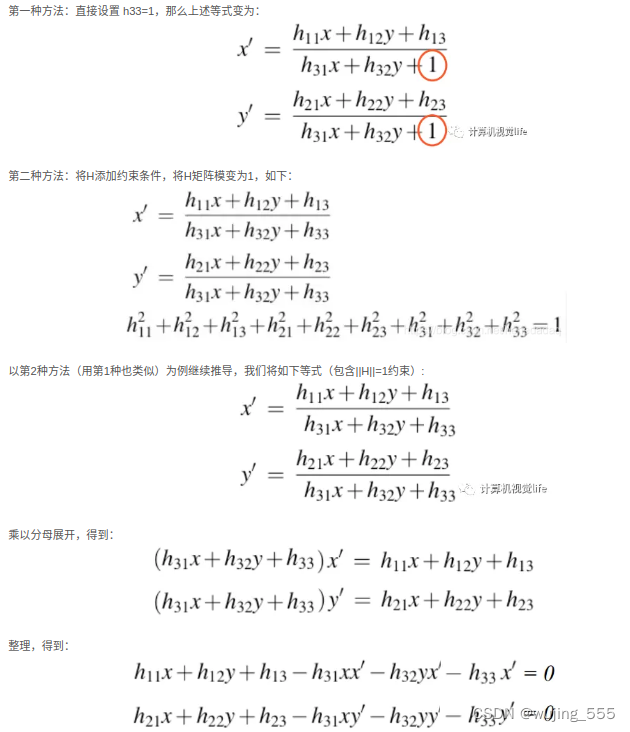
将世界坐标系固定于棋盘格上,则棋盘格上任一点的物理坐标 W=0,因此,原单点无畸变的成像模型可以化为下式:
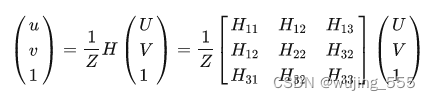
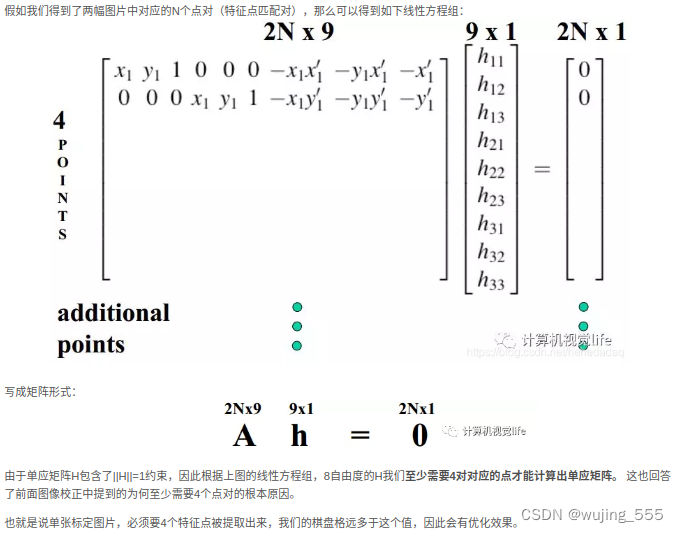
H即为内参矩阵和外参矩阵的积(单应性矩阵,“单应性”是指当单应性矩阵确定后,已知实物坐标可唯一确定像素坐标,但已知像素坐标不能唯一确定实物坐标,原因是缺乏尺度因子)
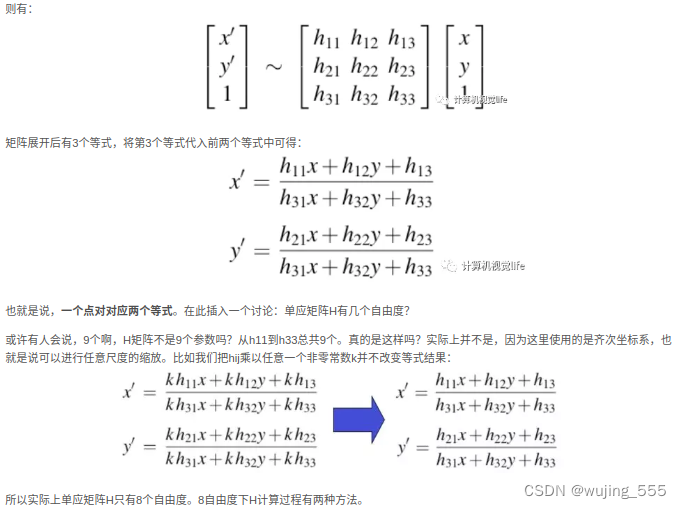
x'、y'即为u、v,x、y即为X、Y(摘抄,不带了编辑公式了)
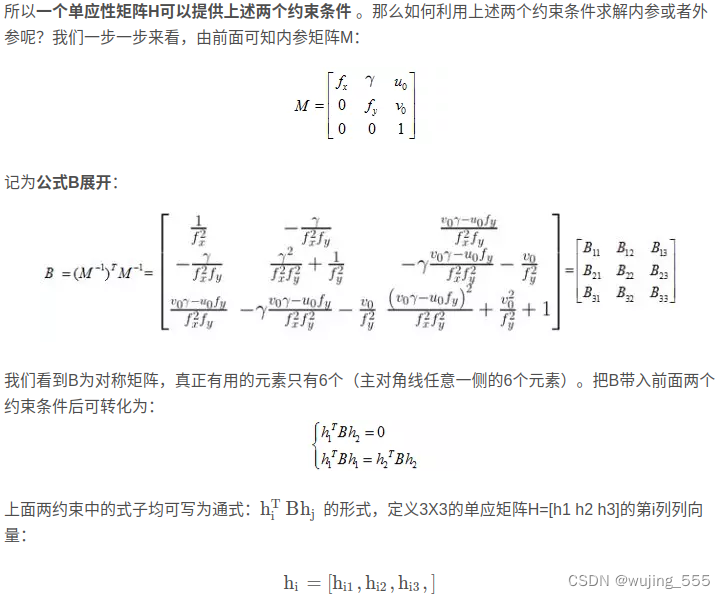
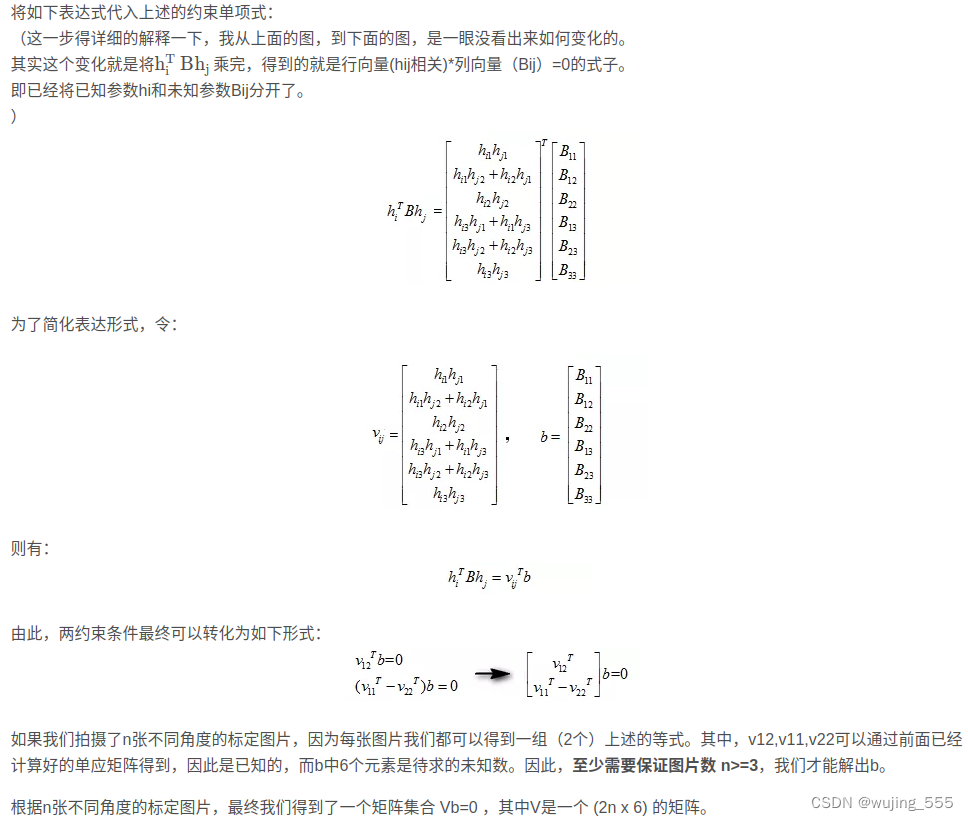
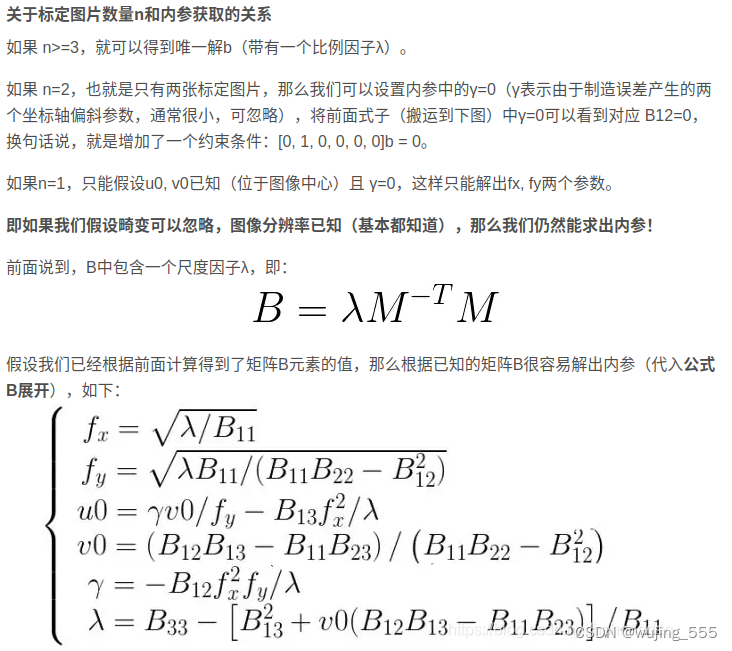
第二步:求解内参矩阵
注意:此时已知像素坐标、实物坐标、内参矩阵和外参矩阵的积H(单应性阵H)
先求内参是因为更容易,因为每张图片的内参都是固定的,而外参是变化的),得到内参后,那张标定图片的外参也就随之解出了。
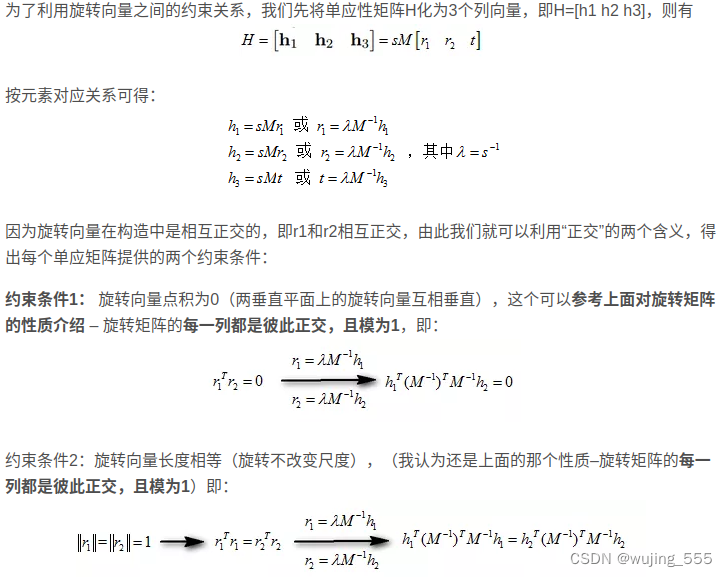
求解内参思路是利用旋转向量的约束关系:旋转矩阵的每一列都是彼此正交,且模为1
第三步:求解外参矩阵
注意:此时已知像素坐标、实物坐标、内参矩阵和外参矩阵的积H(单应性阵H)、内参。
直接求就完了。

















 2935
2935

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









