






前言:因为前面几个星期在忙着准备一个面试,这个星期开始持续更新。。。今天的内容是相位式激光测距项目的整体框图及原理介绍,这部分文章链接将会加到之前的大纲中!
大纲链接:目录大纲
目录:
1 相位式激光测距原理
2 FFT与APFFT鉴相法
3 项目整体框图
1 相位式激光测距原理
激光测距相位法的原理这里就简单介绍一下,下面几张图片均来源于网络。
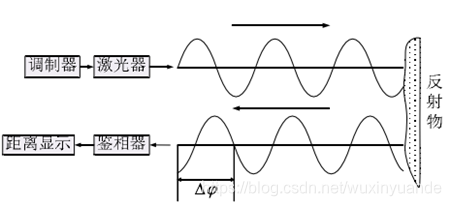
这个项目主要是对激光强度进行调制的相位式激光测距(ps: 还有调频式的激光测距),当我们用一定频率的电信号调制激光器的驱动电流就可以达到调制激光出射信号的调制效果(电光调制),从上图可以看出,当调制完的激光信号经过反射物体反射,我们通过光电检测器件检测回波信号,最终通过鉴相鉴别发射信号与原信号的相位差推算出飞行时间,从而计算出距离差。
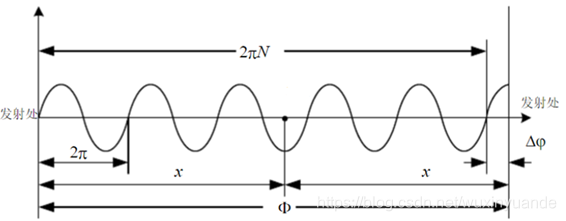
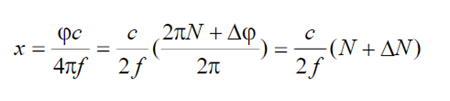
从上图可以看出,激光信号通过N个周期加一个不足周期的飞行时间后返回发射处,我们可以得到距离差的表达式。
飞行时间:

相位差:

距离差:
2 FFT与AP(ALL-PHASE)FFT鉴相法
上一节我们了解了激光测距的原理,这一节简单介绍一下项目使用的鉴相方法-全相位FFT鉴相法,后面会具体介绍如何使用Xilinx A7系列FPGA实现这个鉴相的功能以及显示。
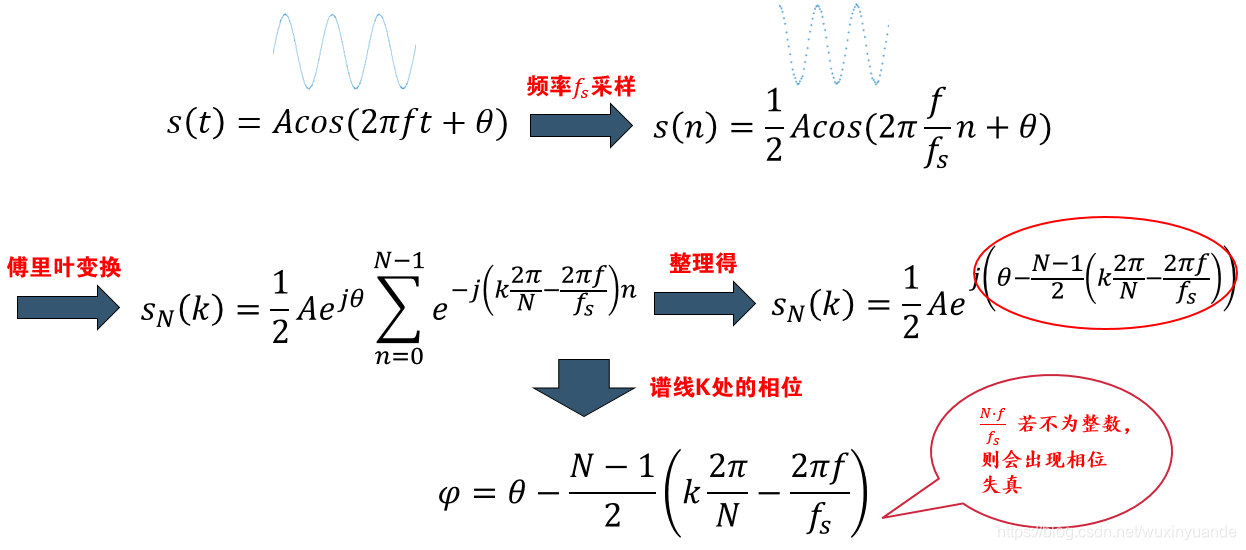 我们设定一个原始信号为s(t),经过AD采样之后的数字序列为s(n),我们对数字序列进行傅里叶变换,整理找出其频率为K的谱线处变换结果,最后进行反正切运算求出初始相位。
我们设定一个原始信号为s(t),经过AD采样之后的数字序列为s(n),我们对数字序列进行傅里叶变换,整理找出其频率为K的谱线处变换结果,最后进行反正切运算求出初始相位。
全相位FFT相较于FFT鉴相法主要是多了一个数据预处理的过程,相比较于FFT鉴相法,全相位FFT具有良好的频谱分析特性,能够有效的抑制频谱旁瓣泄漏,在能量中心多谱线范围内,具有信号初相的 “相位不变性”。它不受信号频率须为频率分辨整数倍的制约,在实际工程实践中,能显著提高测相精度。
关于具体的公式推导和解释,这里就不一一详细介绍了。
3 项目整体框图
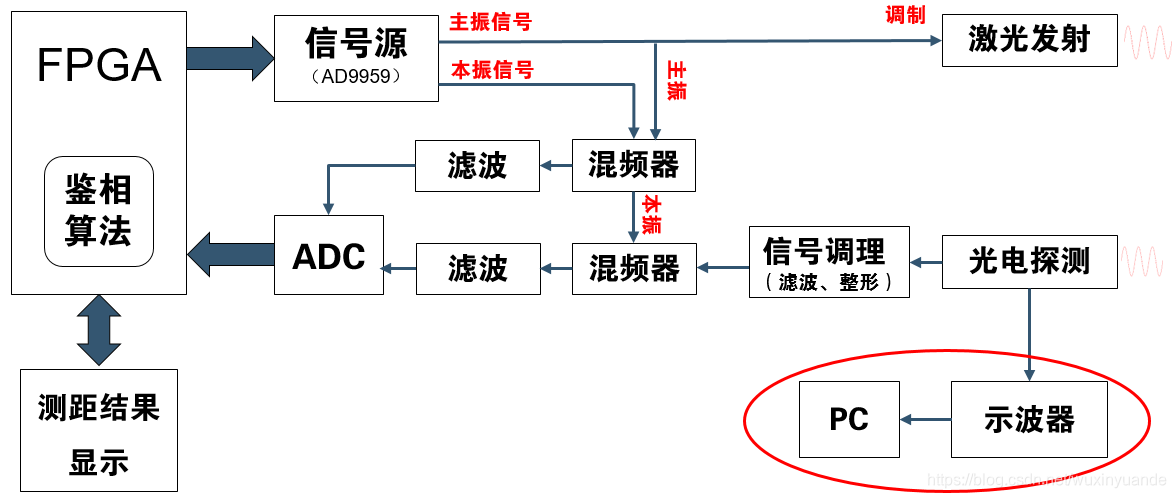
整个项目的结构框图基本如上,这个是我之前讲报告画的一个框图,后来的实际实验有点小区别,但不影响。整个测距系统主要包括三个部分,激光二极管(LD)的调制发射电路,激光回波检测电路和FPGA鉴相部分。我们预期的调制频率为100MHZ,通过FPGA控制DDS芯片(AD9959)产生高频信号调制激光强度,图中主振信号为100MHZ,由于频率较高,所以一般AD采集时候我们采取的方法为差频鉴相,图中的本振信号为99MHZ,通过与主振信号混频得到差频为1MHZ的差频信号便于AD采集,最终通过鉴别初始调制信号和回波信号的相位差得到距离信息。我们的另一个验证方法如图中红圈所示,通过示波器采集光电探测器的回波信号,利用MATLAB软件编写鉴相程序鉴相,可以将MATLAB计算结果与FPGA计算结果对比。
后续我们记录的重点是FPGA鉴相部分算法的编写,持续更新。。。

















 6501
6501

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









