







matlab 多智能体系统编队控制仿真,非线性,一致性,领导跟随控制,有限时间控制等
ID:61599637624085488
爱_会消失吗
在当今科技迅猛发展的时代,智能体系统的应用正在日益广泛。其中,多智能体系统编队控制仿真作为一种重要的技术手段,被广泛应用于无人机、机器人、自动驾驶等领域。本文将围绕非线性、一致性、领导跟随控制以及有限时间控制等关键词,探讨 Matlab 在多智能体系统编队控制仿真中的应用。
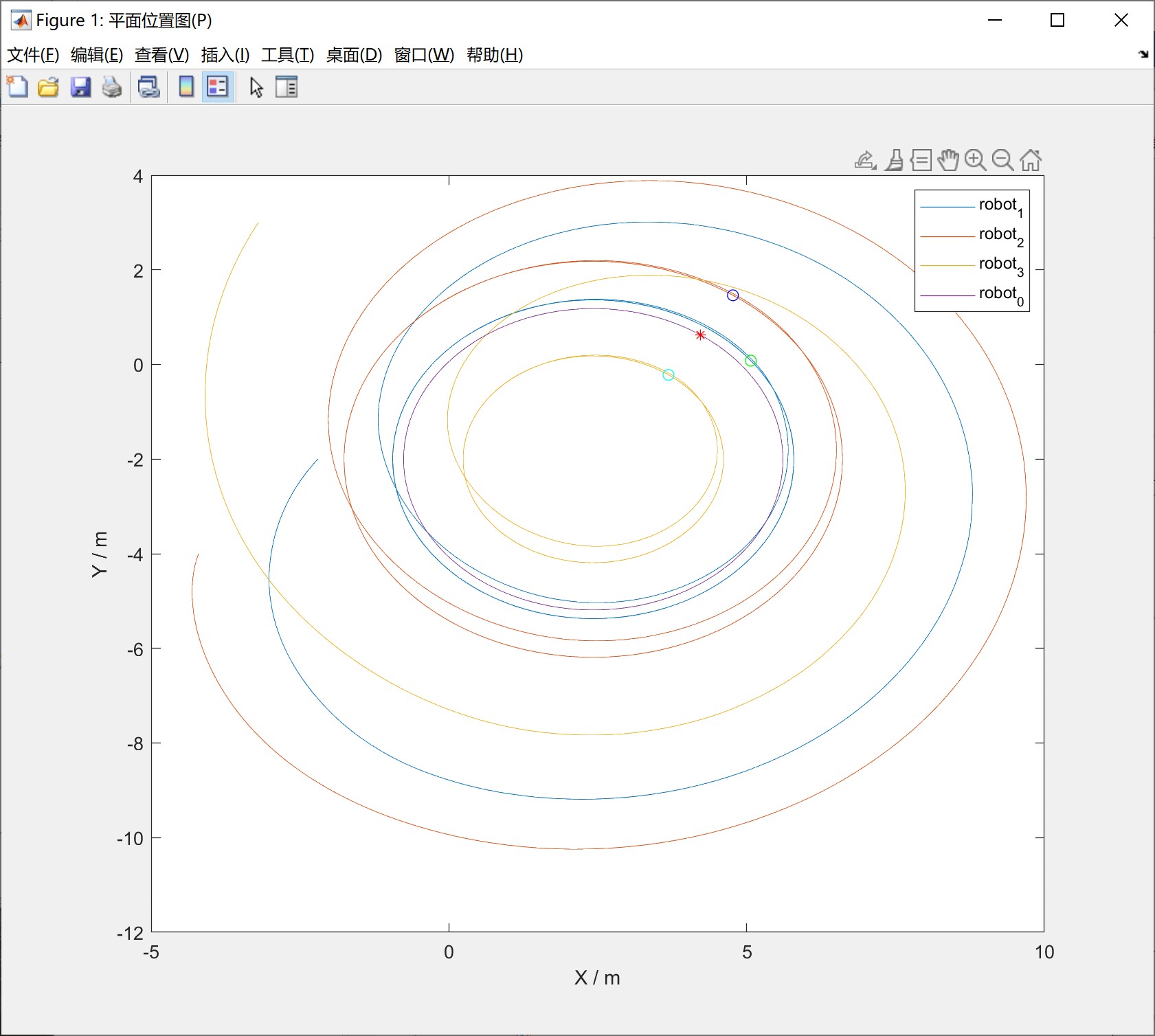
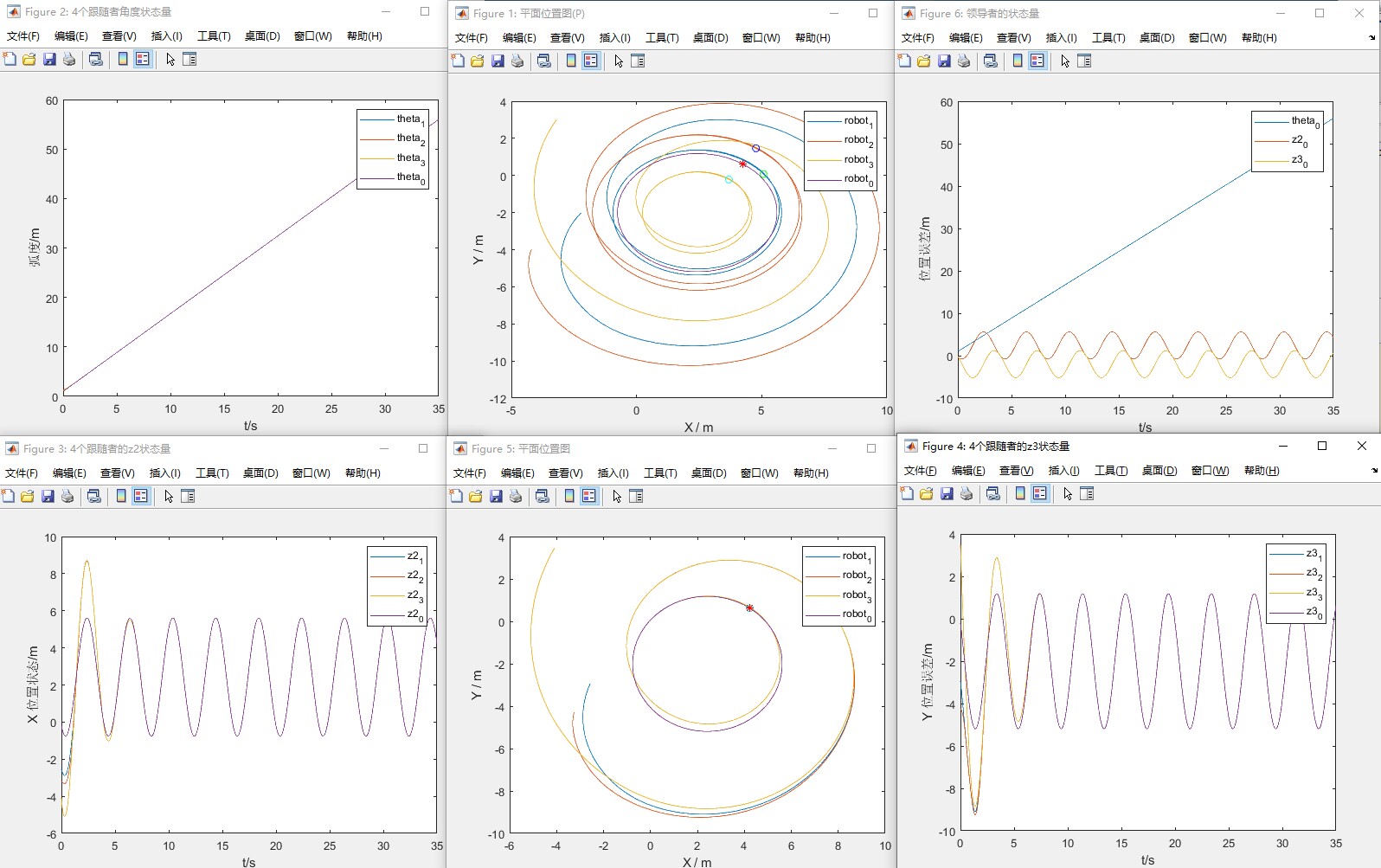
首先,我们来介绍多智能体系统编队控制仿真的概念和背景。多智能体系统编队控制仿真是指通过设计合适的控制算法,使得多个智能体在运动过程中能够保持一定的队形和规律性。在这个过程中,非线性是一个重要的特征,因为智能体之间的相互作用往往是非线性的。在实际应用中,一致性是多智能体系统编队控制的核心目标,即使在存在领导智能体的情况下,其他智能体仍然能够保持一致运动。同时,由于实际应用场景中对运动时间的要求越来越高,有限时间控制也成为多智能体系统编队控制仿真的一个重要方向。
接下来,我们将重点介绍 Matlab 在多智能体系统编队控制仿真中的
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 257
257

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









