






基于扰动观测器的全驱动船舶轨迹跟踪自适应动态面滑模控制
ID:81199721695618009
诚信第一

基于扰动观测器的全驱动船舶轨迹跟踪自适应动态面滑模控制是一种新颖而高效的控制方法,它能够实现对船舶轨迹的准确跟踪,提高船舶的操控性能和安全性。船舶作为一种复杂的动力系统,其受到多种扰动和不确定性的影响,例如海洋风浪、舵机故障等,这些因素都会对船舶的运动和控制产生一定的影响。因此,如何设计一种稳定可靠的控制方法来实现对船舶轨迹的精确跟踪成为了一个具有挑战性的问题。
在传统的船舶控制方法中,常常采用线性控制器来进行轨迹跟踪,但这种方法存在着对扰动和不确定性的鲁棒性较差的问题。为了解决这个问题,一种新的控制策略——基于扰动观测器的全驱动船舶轨迹跟踪自适应动态面滑模控制被提出。
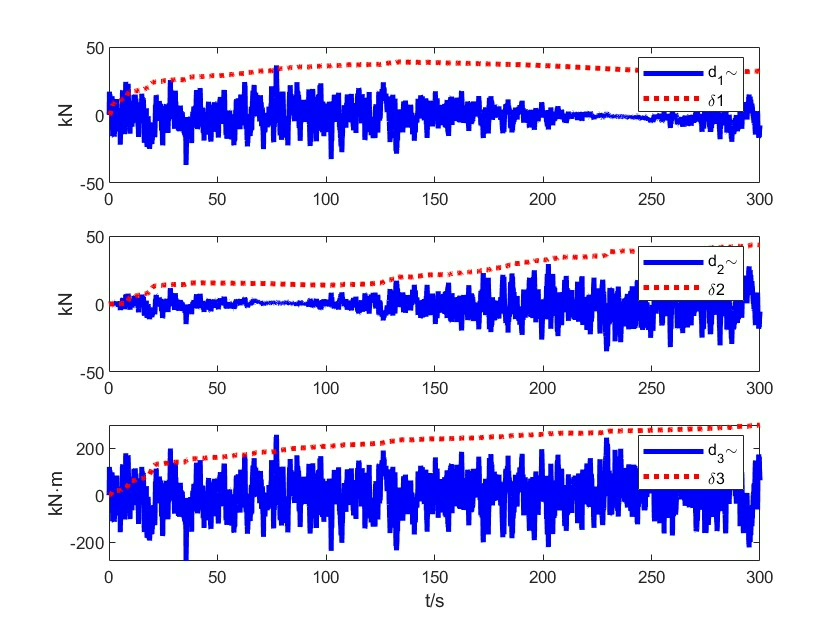
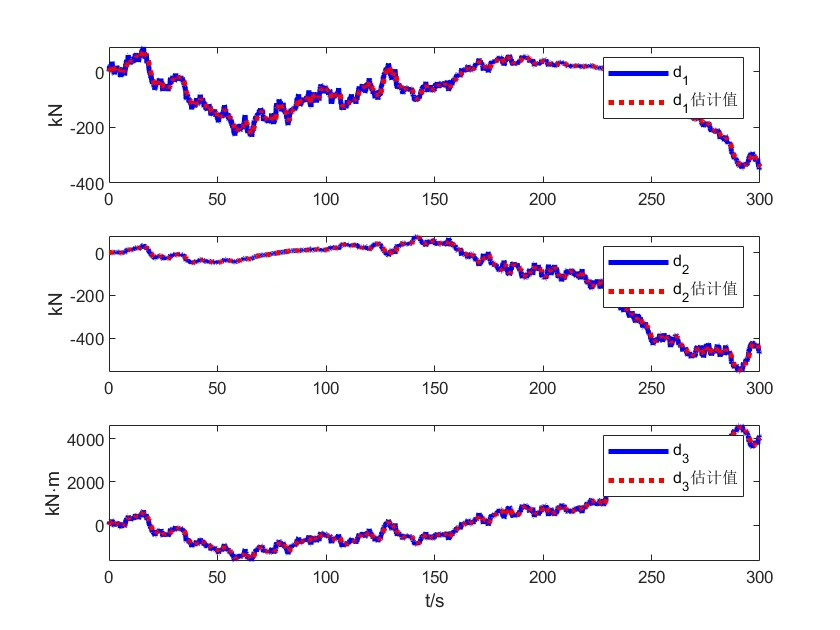
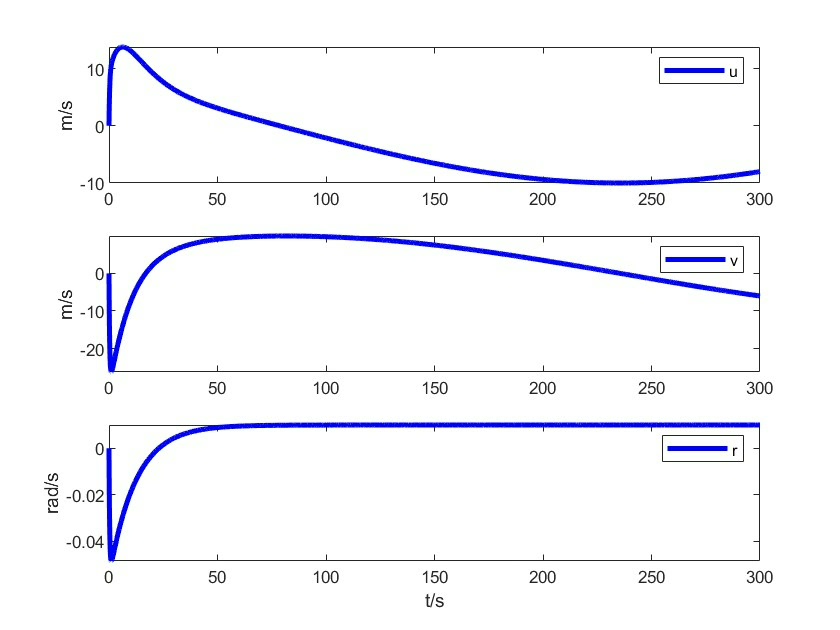
该方法的核心思想是通过引入扰动观测器来估计系统的扰动和不确定性,从而实现对这些因素的补偿。具体来说,在设计控制器时,我们引入了一个扰动观测器,该观测器通过对系统进行测量得到实时的扰动估计值,并将其引入到控制器中进行补偿。通过这种方式,我们可以有效地抵抗扰动和不确定性对系统性能的影响,提高系统的鲁棒性和稳定性。
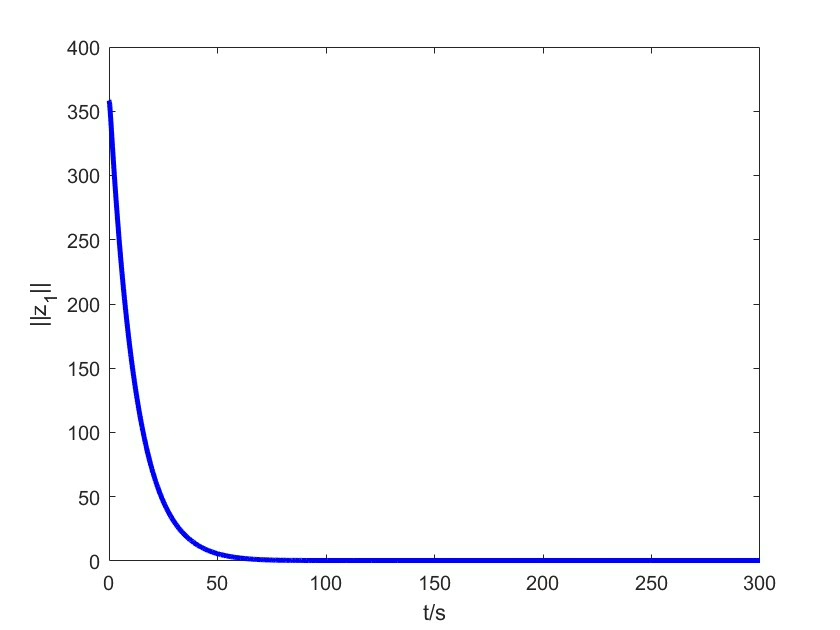
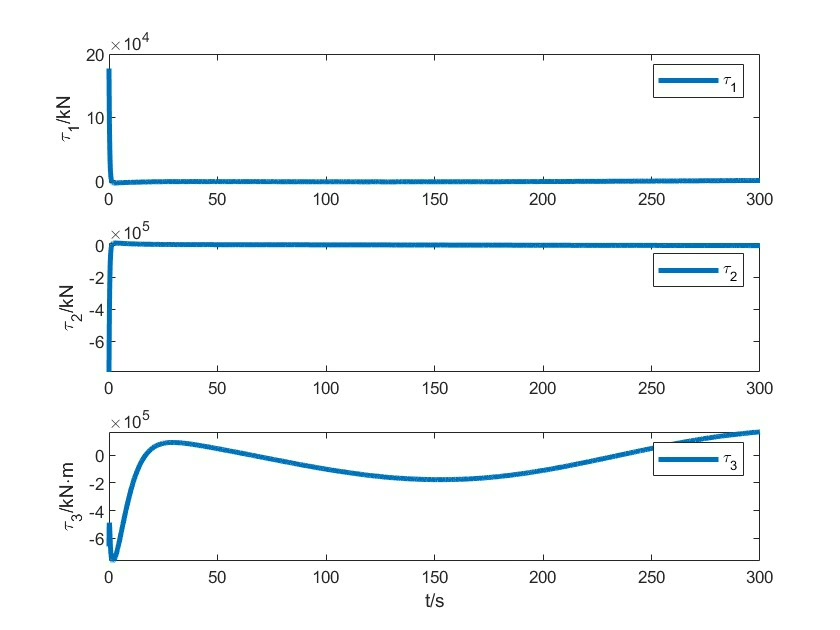
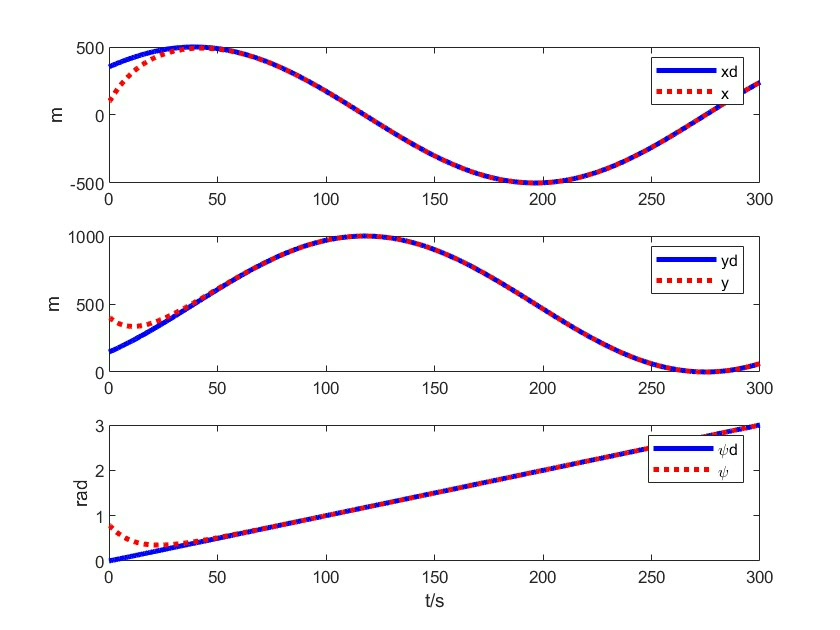
在全驱动船舶轨迹跟踪自适应动态面滑模控制中,动态面滑模控制是一种非常重要的技术手段。通过设计合适的滑模面,可以使系统在滑模面上快速地运动,并具有良好的鲁棒性和稳定性。在传统的滑模控制中,滑模面往往是固定不变的,但在动态面滑模控制中,滑模面是根据系统的实时状态进行动态更新的,从而能够更好地适应系统的变化和扰动。因此,动态面滑模控制能够实现对船舶轨迹的精确跟踪,并具有良好的鲁棒性和稳定性。
基于扰动观测器的全驱动船舶轨迹跟踪自适应动态面滑模控制在实际应用中具有广阔的前景。通过对船舶的控制器进行优化和改进,可以提高船舶的操控性能和安全性,减少事故的发生概率,保护船舶和人员的安全。此外,该控制方法还可以应用于其他动力系统的控制中,如飞行器、机器人等,具有广泛的应用前景。
综上所述,基于扰动观测器的全驱动船舶轨迹跟踪自适应动态面滑模控制是一种新颖而有效的控制方法。通过引入扰动观测器和动态面滑模控制,该方法能够实现对船舶轨迹的准确跟踪,并具有良好的鲁棒性和稳定性。未来,我们可以进一步研究和改进这种控制方法,以应对更加复杂和严峻的控制环境,推动船舶控制技术的发展。
【相关代码,程序地址】:http://fansik.cn/721695618009.html
















 435
435











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









