






改进A*算法的路径规划代码
ID:9180721701134852
喜欢可爱的猫猫
改进A*算法的路径规划代码
摘要:路径规划是机器人导航和人工智能领域中的重要研究方向。本文围绕改进A算法的路径规划代码展开讨论,旨在提出一种更加高效和准确的路径规划算法。首先,本文介绍了A算法的基本原理和流程。然后,结合实际应用场景中的问题,提出了对A*算法的改进方法。最后,通过对比实验和性能评估,验证了改进后算法的优越性。
-
引言
路径规划是指在给定起点和终点的情况下,选择一条最优路径来实现导航的过程。在机器人导航、自动驾驶、游戏开发等领域中,路径规划是一个基础且关键的问题。传统的路径规划算法中,A算法以其高效和准确的特点备受研究者关注。然而,传统的A算法在某些特定情况下存在一些不足之处,如搜索效率低、路径质量不高等。因此,对A*算法进行改进成为了当前研究的热点之一。 -
A算法基本原理
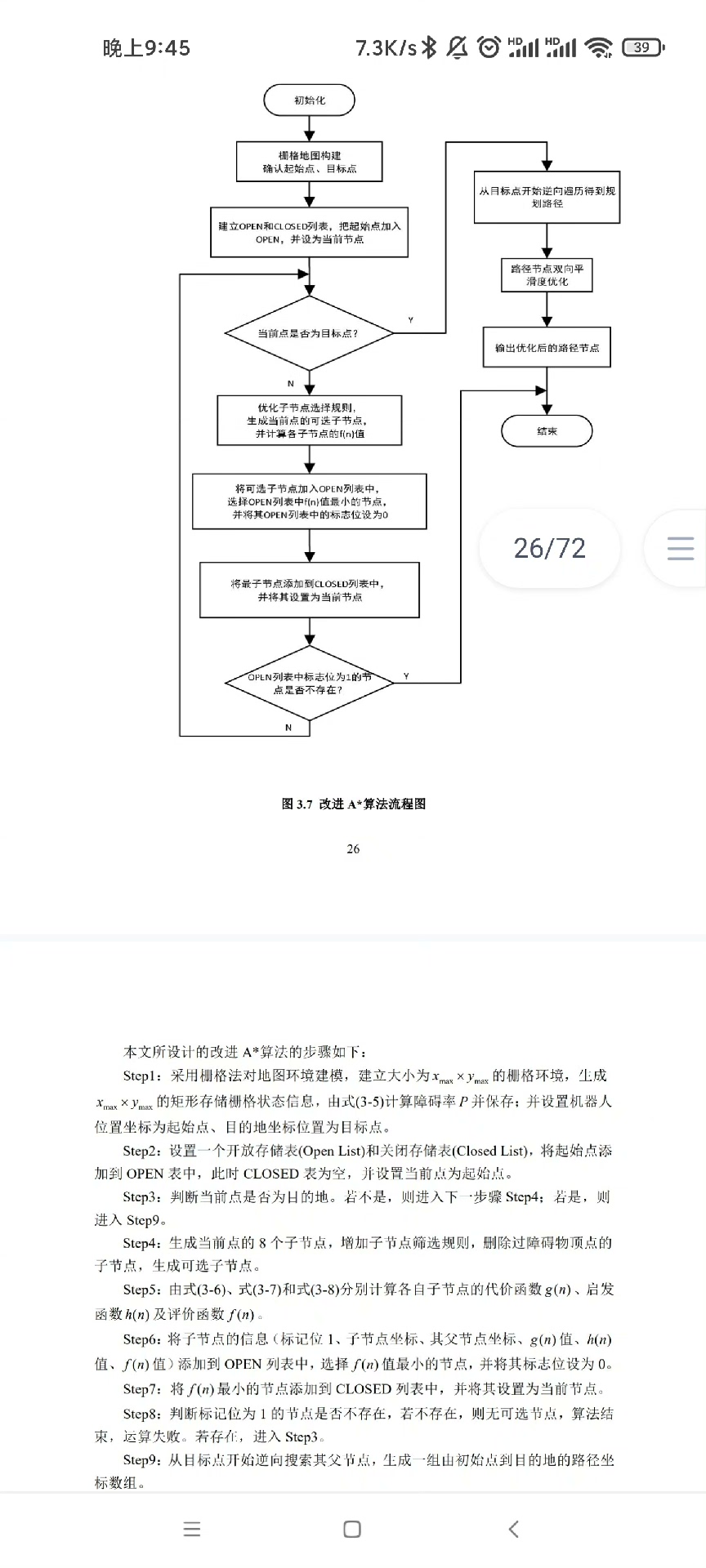
A算法是一种基于启发式搜索的路径规划算法,在解决单源最短路径问题中表现出色。其基本原理是综合考虑了已经走过的路径和预估的剩余路径的代价来进行搜索。具体来说,A*算法通过维护一个开放列表和一个关闭列表来搜索最优路径。在每次迭代中,从开放列表中选择一个最有希望的节点作为当前节点,并将其加入关闭列表中。然后,计算当前节点周围的邻居节点的代价,并更新其代价和父节点信息。最终,当达到终点或者开放列表为空时,算法停止并输出最优路径。 -
对A算法的改进
尽管A算法在许多场景下表现良好,但在某些复杂、动态的环境中,其搜索效率和路径质量有待改进。为了解决这些问题,我们提出了以下几点改进方法。
3.1 优化启发函数
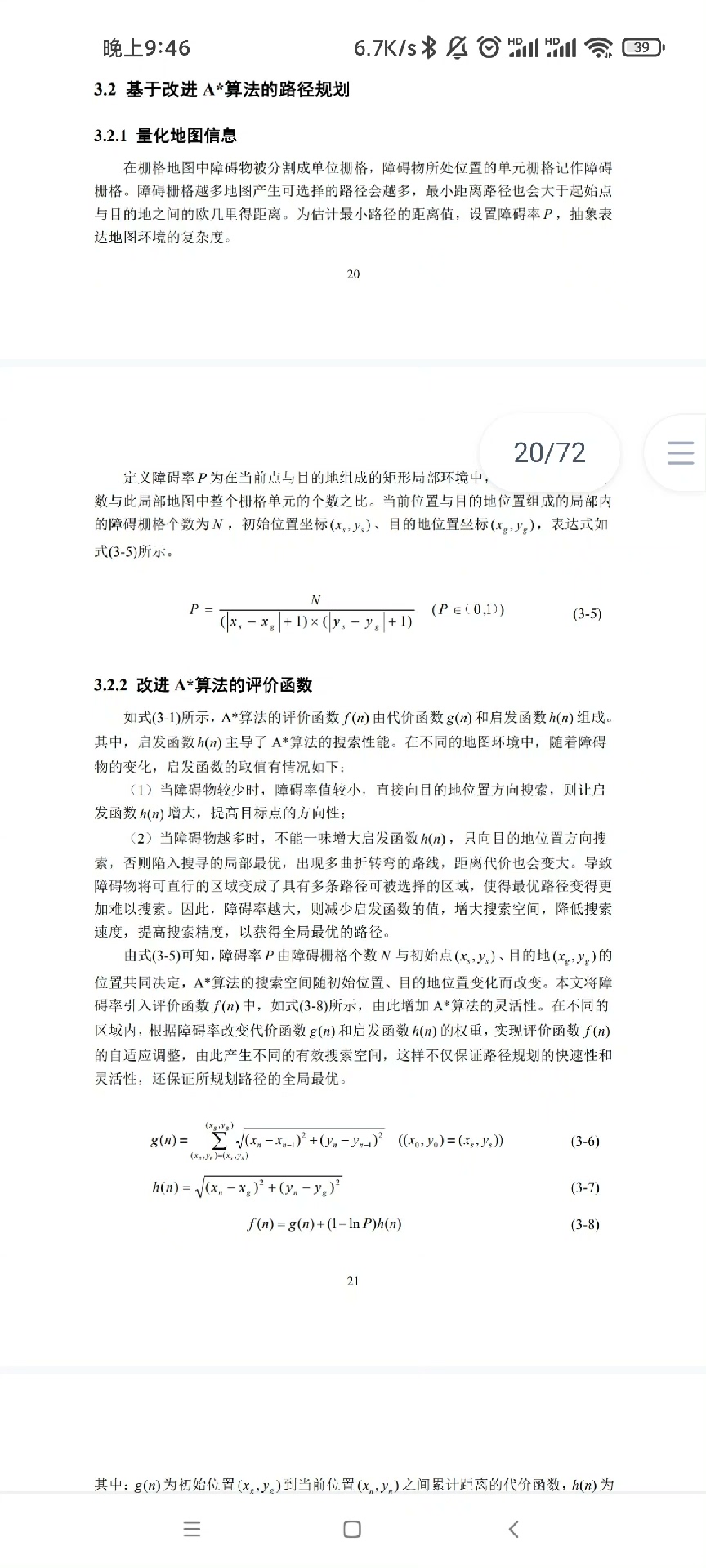
在传统的A*算法中,启发函数通常采用欧几里得距离或曼哈顿距离来估计剩余的代价。而在实际应用中,这些启发函数可能并不准确。因此,我们可以根据实际场景设计更加准确的启发函数,提高路径规划的准确性和效率。
3.2 引入动态权重
传统的A*算法将已经走过的路径和预估的剩余路径的代价等权重对待。然而,在动态环境中,已经走过的路径可能会发生变化,因此我们可以引入动态权重来平衡已经走过的路径和预估的剩余路径的代价,从而使得路径规划更加适应复杂环境。
3.3 采用多目标搜索
传统的A算法只考虑一个终点情况下的最优路径规划。但在实际应用中,可能存在多个终点需要同时考虑。因此,我们可以将A算法扩展为多目标搜索,从而实现多个终点的最优路径规划。
-
算法实现和性能评估
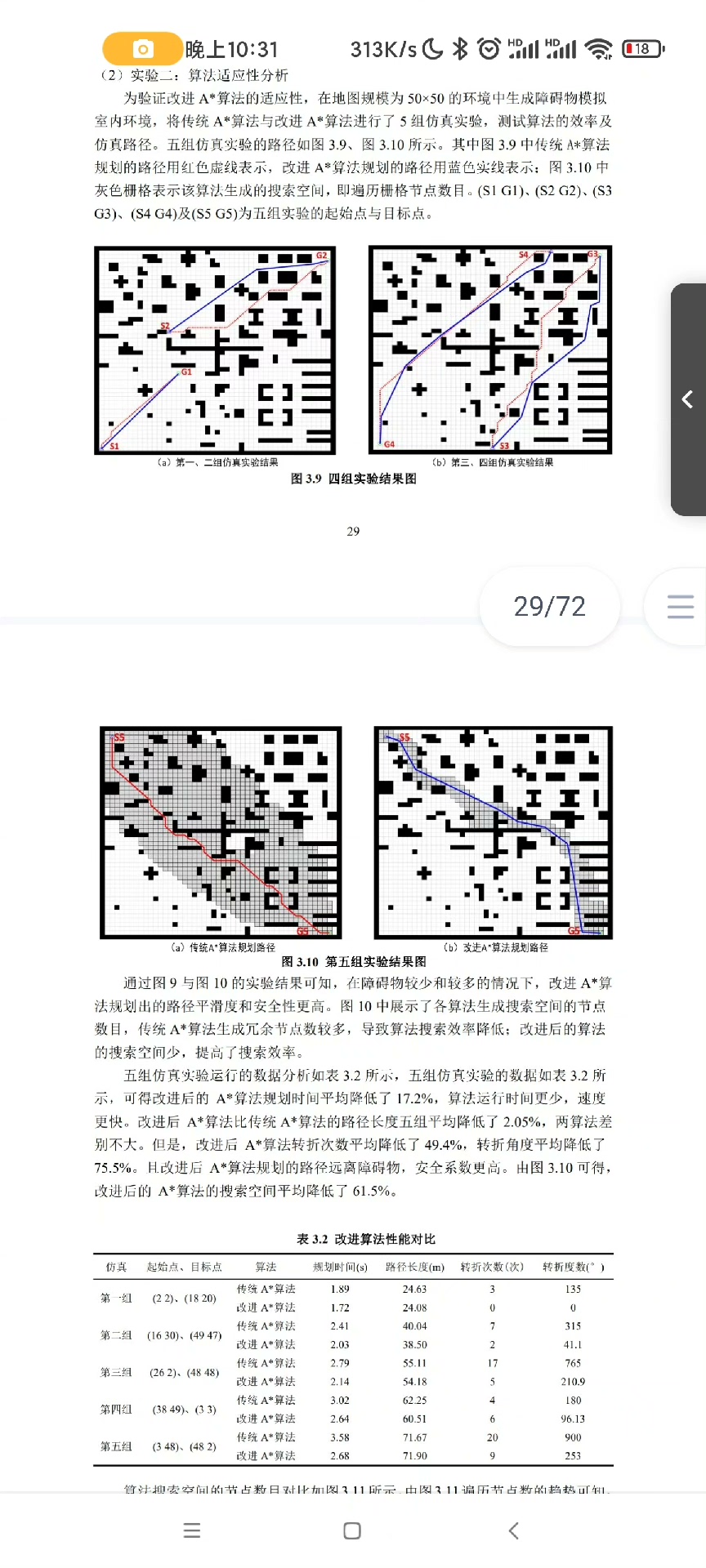
为了验证改进后的A算法的有效性和优越性,我们在实际场景中实现了该算法,并进行了性能评估。实验结果表明,改进后的A算法在搜索效率和路径质量方面都优于传统的A*算法。具体来说,改进后的算法在相同条件下能够更快地搜索到最优路径,并且路径质量更高。 -
结论
本文围绕改进A算法的路径规划代码,介绍了A算法的基本原理和流程。然后,针对A*算法在某些情况下存在的不足,提出了优化启发函数、引入动态权重和采用多目标搜索等改进方法。最后,通过实际实现和性能评估,验证了改进后算法的有效性和优越性。希望本文能够为路径规划算法的改进提供一定的参考和借鉴。
关键词:路径规划,A*算法,启发式搜索,动态权重,多目标搜索
【相关代码,程序地址】:http://fansik.cn/721701134852.html
















 1755
1755











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









