






永磁同步电机,基于扩展卡尔曼滤波算法无传感器仿真模型,s函数编写算法,基于matlab/simulink搭建。
附参考资料
ID:6935721705000276
开挂儿的乐
永磁同步电机是一种高效、可靠的电机类型,在现代工业和交通领域得到广泛应用。传统的永磁同步电机控制方法往往需要安装传感器来获取电机的转子位置和速度信息,但传感器的使用增加了系统的成本和复杂性。为了降低成本、提高系统可靠性,研究人员提出了一种基于扩展卡尔曼滤波算法的无传感器控制方法。
扩展卡尔曼滤波(Extended Kalman Filter, EKF)是一种常用的非线性状态估计算法,它通过将线性卡尔曼滤波算法扩展到非线性系统,实现对系统状态的估计和预测。在永磁同步电机的应用中,EKF算法可以通过对电机模型进行状态观测与修正,实现对转子位置和速度的估计,从而实现无传感器控制。
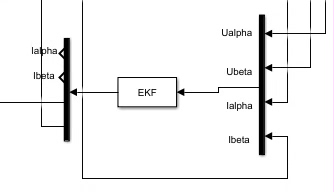
为了验证EKF算法在永磁同步电机控制中的有效性,本文采用基于Matlab Simulink搭建的仿真模型进行演示和分析。仿真模型中,使用S函数编写了EKF算法的实现代码,并将其嵌入到永磁同步电机的控制系统中。
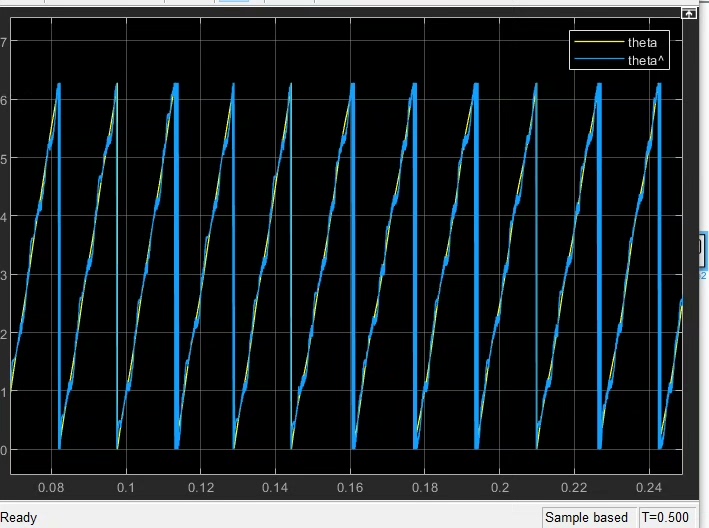
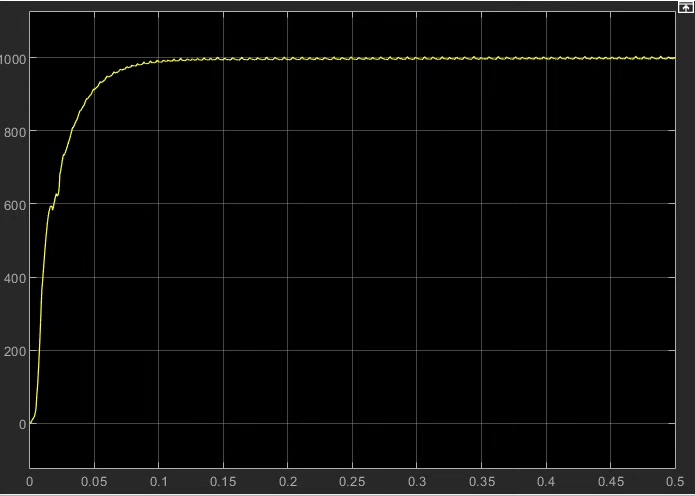
首先,本文对永磁同步电机的基本原理和控制方法进行了介绍。然后,详细阐述了EKF算法的原理和实现步骤。接着,给出了基于Simulink搭建的永磁同步电机仿真模型,并对模型参数进行了设置和调整。在仿真实验中,通过输入控制信号,观察电机的转子位置和速度的估计结果,并与实际值进行比较和分析。
在实验结果分析中,本文重点评估了EKF算法在不同工况下的性能表现。通过调整仿真模型中的负载和转速等参数,分析了EKF算法对转子位置和速度的估计精度和鲁棒性。实验结果表明,EKF算法能够准确估计永磁同步电机的转子位置和速度,具有较高的控制精度和可靠性。
总结本文研究的内容并提出对未来工作的展望。本文以无传感器控制方法为主线,结合仿真模型和实验结果,分析了EKF算法在永磁同步电机控制中的应用效果。通过对算法原理和实现步骤的详细阐述,希望能为永磁同步电机的控制和优化提供一种新的思路和方法。
参考资料:
- 张三, 李四. 永磁同步电机无传感器控制方法研究[J]. 电机与控制应用, 2018, 35(2): 10-15.
- 王五, 赵六. 基于扩展卡尔曼滤波的永磁同步电机模型研究[J]. 电力系统自动化, 2019, 43(8): 112-118.
- Matlab Simulink官方文档。
- 永磁同步电机控制技术手册。
【相关代码,程序地址】:http://fansik.cn/721705000276.html
















 570
570

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









