







公式推导:

code:
import numpy as np
import matplotlib.pyplot as plt
x_data = [1.0, 2.0, 3.0]
y_data = [2.0, 4.0, 6.0]
w = 1.0
epoch_list = []
cost_list = []
def forward(x):
return x * w
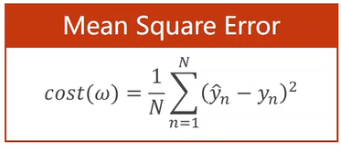
def cost(xs,ys):
cost = 0
for x, y in zip(xs, ys):
y_pred = forward(x)
cost += (y_pred - y) ** 2 # 单个损失函数
return cost / len(xs)
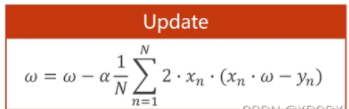
def gradient(xs, ys):
grad = 0
for x, y in zip(xs, ys):
grad += 2 * x * (x * w - y) # 公式 cost对w求偏导的公式
return grad / len(xs)
print('Predict(before training)', 4, forward(4))
for epoch in range(100):
cost_val = cost(x_data, y_data)
grad_val = gradient(x_data, y_data)
w -= 0.01 * grad_val
epoch_list.append(epoch)
cost_list.append(cost(x_data, y_data))
print('Epoch:', epoch, 'w=', w, 'loss=', cost_val)
print('Predict(after training)', 4, forward(4))
plt.plot(epoch_list, cost_list)
plt.xlabel('epoch')
plt.ylabel('loss')
plt.show()
效果图:

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









