








 超级会员免费看
超级会员免费看

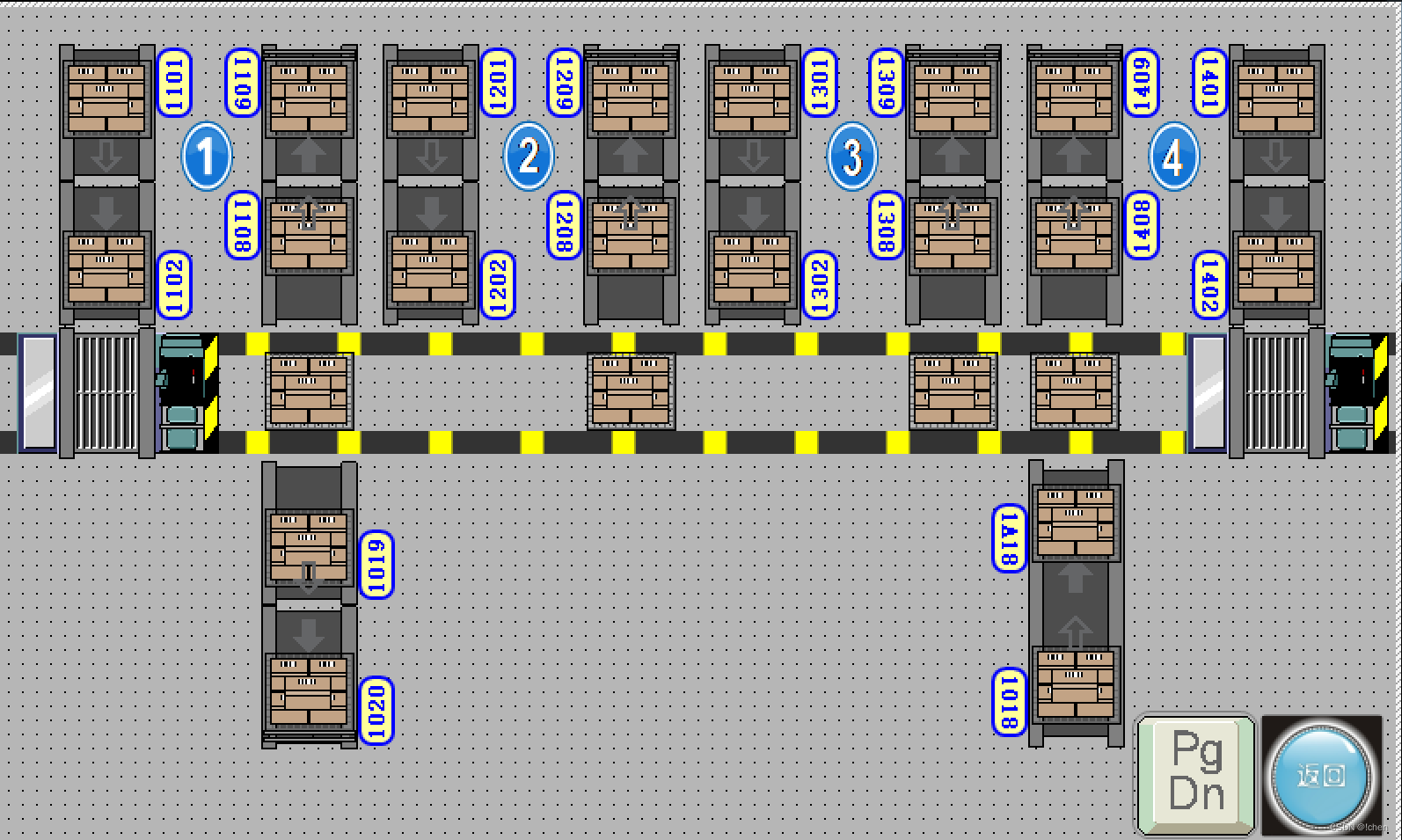
1、联网界面
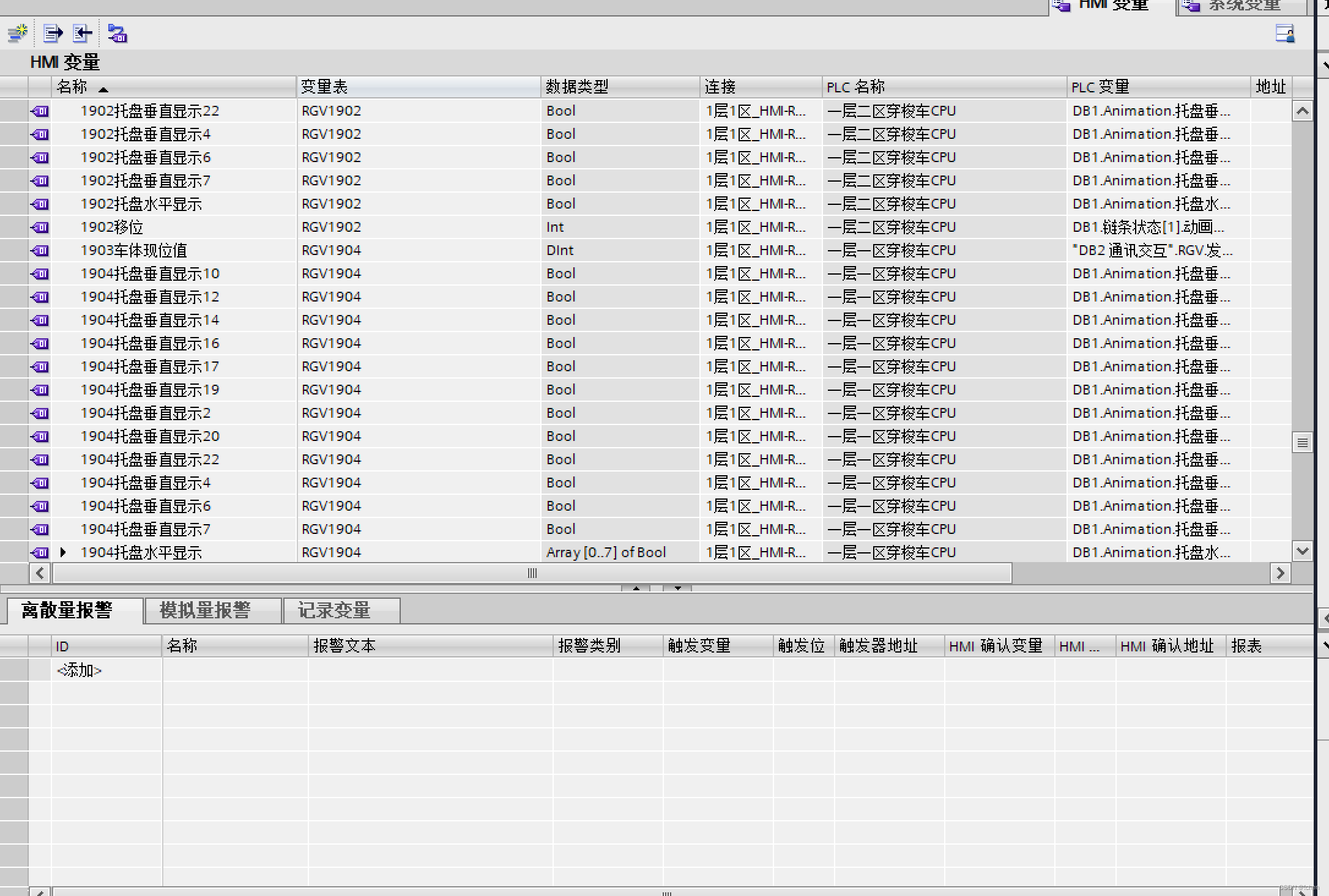
2、AGV小车对应变量
3、手动RGV运行代码
IF NOT "DB1".模式切换.手动清位 THEN
RETURN;
END_IF;
"FC13 水平手动"(前限开关 := "前限开关",
前换开关 := "前换开关",
后换开关 := (("DB2 通讯交互".RGV.接收内容.车体现位值 - "DB2 通讯交互".RGV.发送内容.车体现位值) > "DB2 通讯交互".RGV.两车安全距离),
后限开关 := 1,//"后限开关",
防撞开关 := "防撞开关",
IN1 := 400,
IN2 := 2500,
IN3 := 5000,

 订阅专栏 解锁全文
订阅专栏 解锁全文



















 1336
1336

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











