







一.双目视觉原理
双目立体视觉三维测量是基于视差原理。
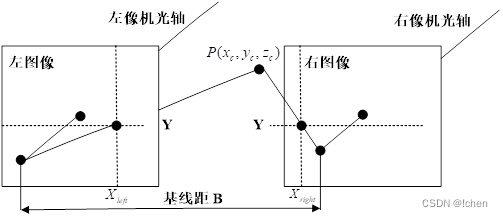
图 双目立体成像原理

因此,左相机像面上的任意一点只要能在右相机像面上找到对应的匹配点,就可以确定出该点的三维坐标。这种方法是完全的点对点运算,像面上所有点只要存在相应的匹配点,就可以参与上述运算,从而获取其对应的三维坐标。

从图中可看出,你会发现左图A点的水平距离比右图中对应点到图像边缘的水平距离要大。两距离之间的绝对值差值定义为视差,我们可以根据这个距离来确定点A 到相机之间的距离。同时从图中可以发现,图像上端到所匹配的特征的距离完全相同,这是因为相机是水平排列的,因此只有水平方向的位移。

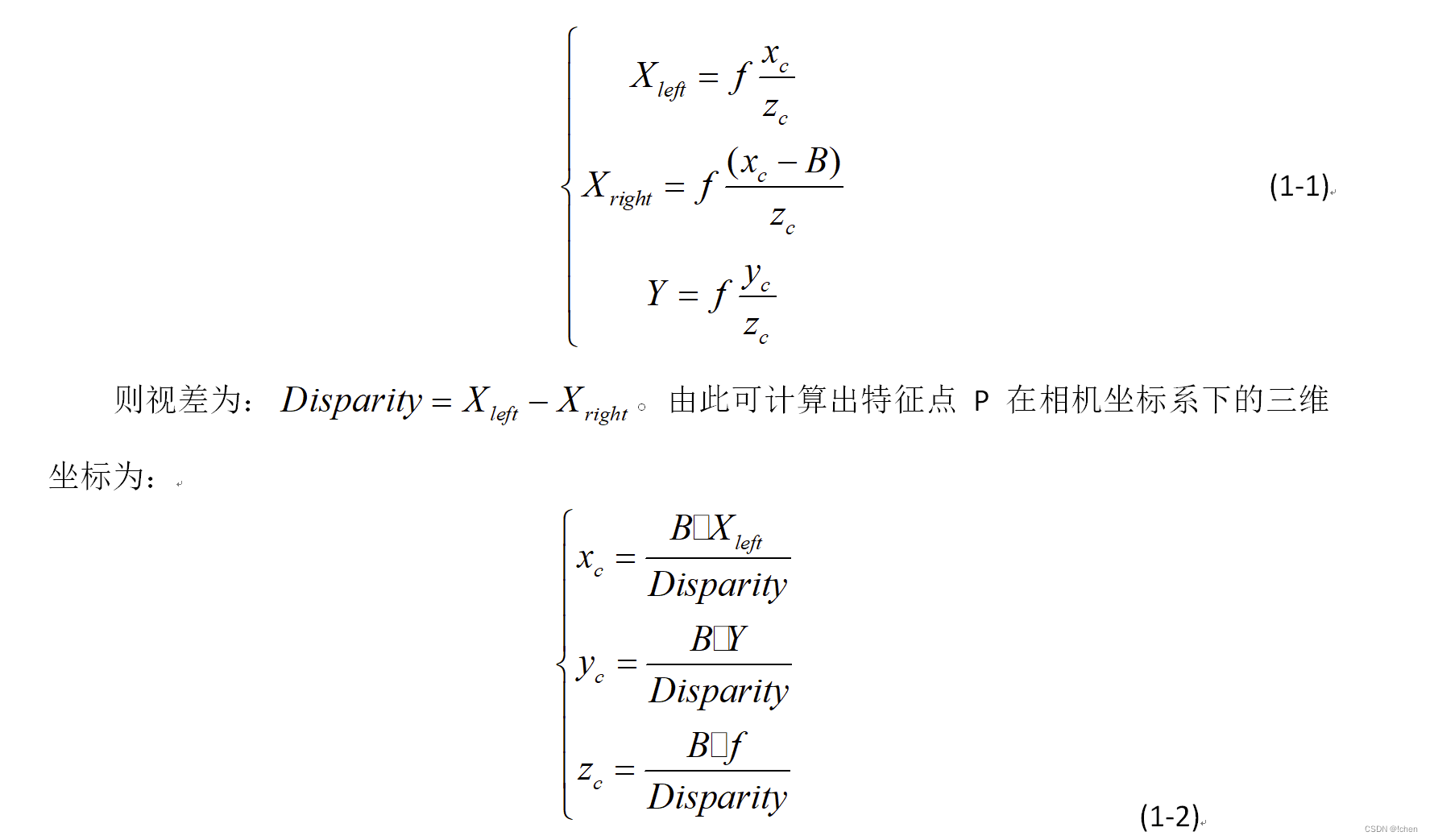
计算距离
物体到相机的距离可由视差和相机的几何结构确定。所匹配的特征的距离是视差,镜头焦距的长度,CCD的分辨率和基线长度(两相机间的距离)的函数。
Triclops库提供了深度映射转化为距离图像的函数。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 1500
1500











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











