






mpc模型预测控制从原理到代码实现
mpc模型预测控制详细原理推导
matlab和c++两种编程实现
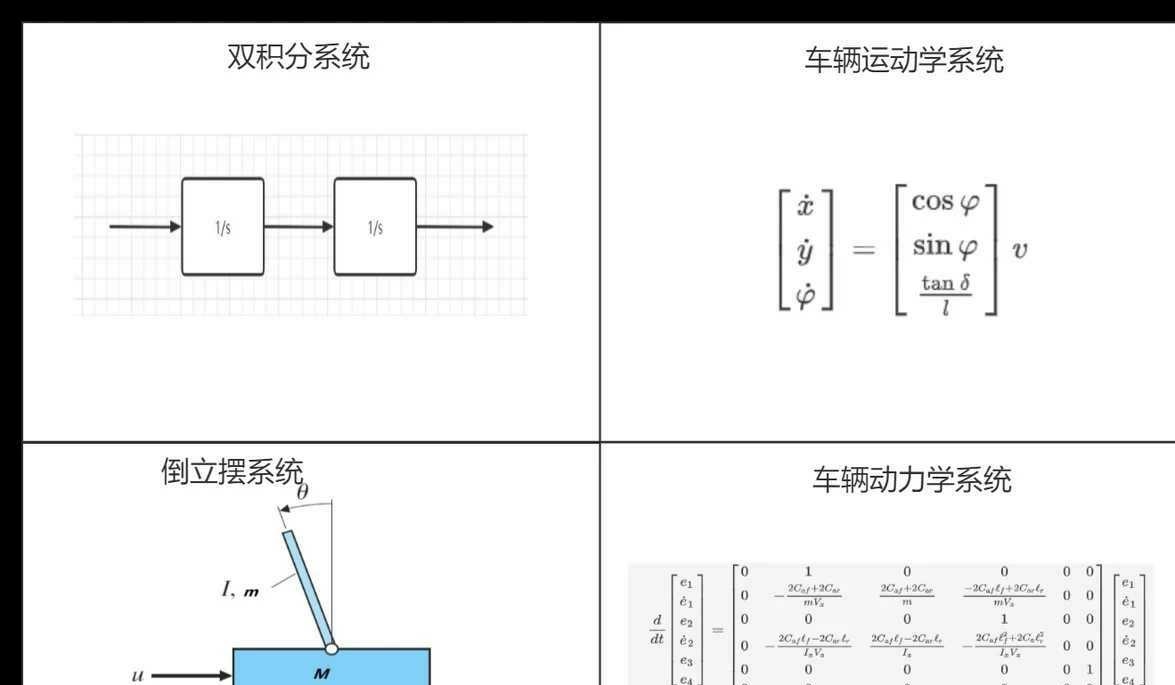
四个实际控制工程案例:
双积分控制系统
倒立摆控制系统
车辆运动学跟踪控制系统
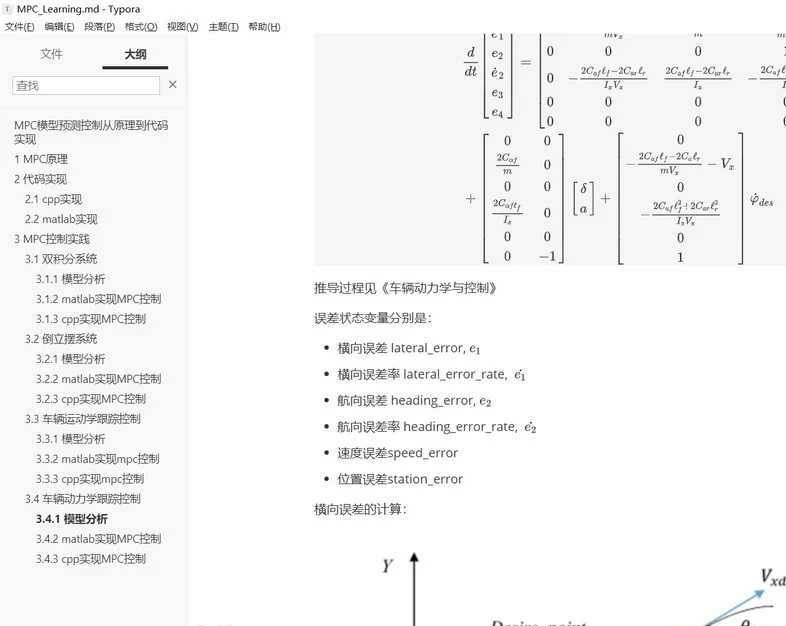
车辆动力学跟踪控制系统
包含上述所有的文档和代码。
YID:1239660767836269
未来星罕见的川乌
MPC模型预测控制从原理到代码实现
引言:
MPC模型预测控制(Model Predictive Control)是一种广泛应用于工业自动化领域的控制算法。它基于系统的数学模型,通过将未来一段时间内的系统行为进行预测,并基于预测结果来优化控制策略,从而实现对系统的精确控制。本文将详细介绍MPC模型预测控制的原理推导,并介绍其在Matlab和C++两种编程语言中的实现方法。此外,还将通过四个实际控制工程案例来展示MPC模型预测控制的应用。
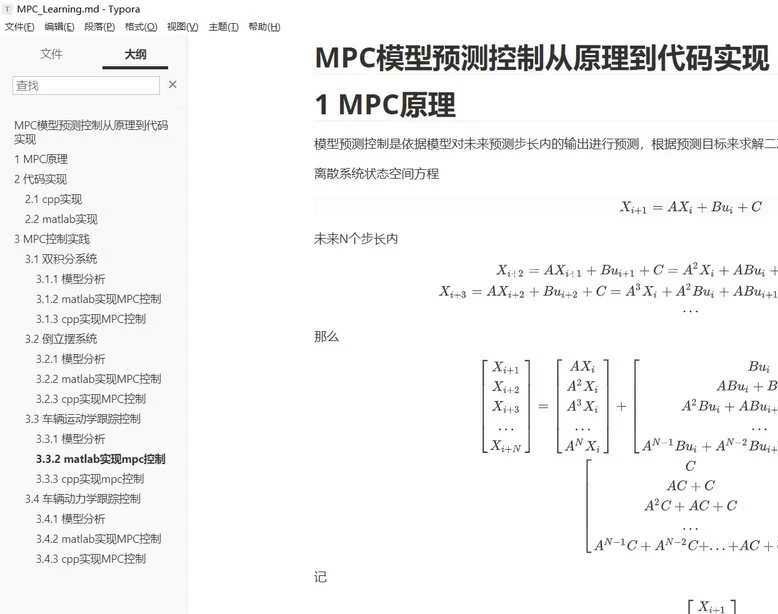
一、MPC模型预测控制原理推导
MPC模型预测控制的核心思想是在每个控制周期内,通过求解一个优化问题来确定最佳的控制策略。该优化问题基于系统的数学模型以及一个预测时间窗口,通过最小化一个性能指标来求解最优控制策略。本节将详细推导MPC模型预测控制的原理。
1.1 系统模型的建立
MPC模型预测控制首先需要建立系统的数学模型。系统模型可以是线性的或非线性的,可以通过物理方程、实验数据或系统辨识方法来获得。本文以双积分控制系统为例,详细介绍系统模型的建立过程。
1.2 控制器设计
在MPC模型预测控制中,控制器的设计主要包括两个关键步骤:预测模型的建立和性能指标的选择。预测模型用于预测未来一段时间内系统的行为,而性能指标则用于衡量控制效果的好坏。本文将详细介绍预测模型的建立和性能指标的选择方法。
1.3 优化问题的求解
MPC模型预测控制的核心是通过求解一个优化问题来确定最佳的控制策略。该优化问题一般是一个非线性、多变量的优化问题,需要使用优化算法来求解。本文将介绍常用的优化算法,并详细讲解如何将优化问题转化为标准的优化形式。
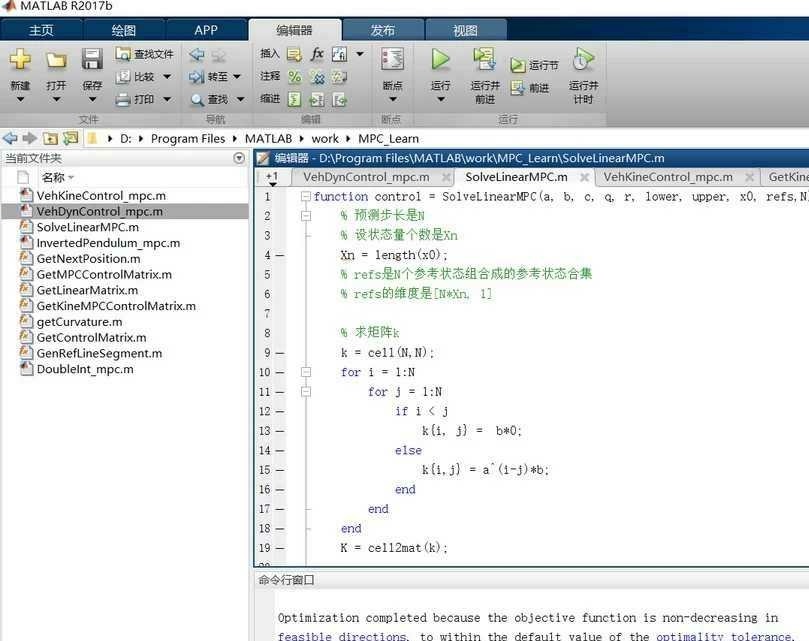
二、MPC模型预测控制的Matlab实现
Matlab是一种功能强大的数值计算和数据可视化工具,广泛应用于控制系统的建模和仿真。在MPC模型预测控制的实现过程中,Matlab提供了丰富的工具和函数库,能够方便地进行模型建立、优化求解和结果分析。本节将介绍如何使用Matlab实现MPC模型预测控制。
2.1 MPC模型预测控制的建模
在Matlab中,可以使用StateSpace或TransferFunction对象来表示系统的数学模型。本文将详细介绍如何利用Matlab进行系统的建模,并给出代码示例。
2.2 MPC模型预测控制的优化求解
Matlab提供了多种优化算法的函数接口,包括线性规划、非线性规划和二次规划等。本文将介绍如何使用Matlab中的优化函数进行MPC模型预测控制的优化求解,并给出代码示例。
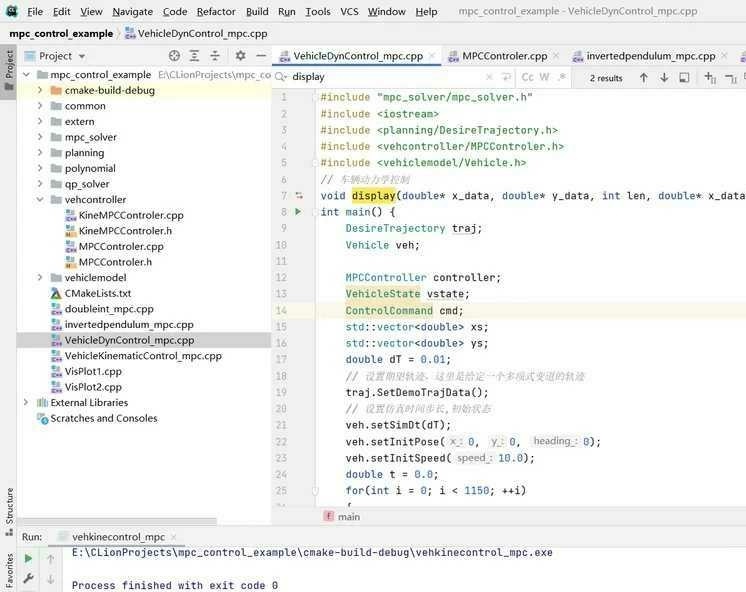
三、MPC模型预测控制的C++实现
相比于Matlab,C++是一种更为底层的编程语言,能够提供更高的性能和实时性。在工业自动化领域中,很多实际控制系统采用C++作为编程语言进行开发和实现。本节将介绍如何使用C++实现MPC模型预测控制。
3.1 MPC模型预测控制的建模
在C++中,可以使用数值计算库(如Eigen)来表示系统的数学模型。本文将详细介绍如何利用C++进行系统的建模,并给出代码示例。
3.2 MPC模型预测控制的优化求解
C++提供了多种优化库,如IPOPT、NLopt等,可以用于解决非线性优化问题。本文将介绍如何使用C++中的优化库进行MPC模型预测控制的优化求解,并给出代码示例。
四、实际控制工程案例
为了验证MPC模型预测控制的有效性,本文将介绍四个实际控制工程案例的应用。这些案例分别是双积分控制系统、倒立摆控制系统、车辆运动学跟踪控制系统和车辆动力学跟踪控制系统。本文将详细介绍每个案例的系统模型建立、控制器设计和实验结果,并给出代码示例。
总结:
本文从MPC模型预测控制的原理推导开始,详细介绍了系统模型的建立、控制器设计和优化问题的求解。然后,分别介绍了MPC模型预测控制在Matlab和C++中的实现方法,并给出了代码示例。最后,通过四个实际控制工程案例的应用,验证了MPC模型预测控制的有效性。希望本文能够帮助读者深入理解MPC模型预测控制算法,并在实际应用中发挥重要作用。
备注:本文不包含参考文献和示例代码,请在实际发布时自行添加。
以上相关代码,程序地址:http://coupd.cn/660767836269.html















 2625
2625











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









