







雷达一维成像:基于数据集的实践
(距离压缩\距离-时间图\距离-多普勒图\微多普勒图)
说明
雷达成像技术是雷达发展的一个重要里程碑:从此雷达的功能不仅仅是将所观测的对象视为点目标,并只测量它的位置与运动参数。雷达成像技术使得我们可以获得目标和场景的图像!(类似基于摄像机的光学成像了!),当然其成像效果不会有光学那么清晰(信息量没有光学那么丰富),但是其具备光学没有的诸多优势:距离远、全天时全天候、具备速度测量能力(动目标检测)。
雷达成像最常用的技术手段是合成孔径技术(及其诸多拓展:如ISRA、InSAR等等),我新建的专题:雷达成像技术_墨@#≯的博客-CSDN博客主要就是围绕SAR来展开。雷达成像从结果来看,我们可以将之简单分为:一维、二维以及三维成像。本博文探讨一维成像,一维成像主要围绕距离和速度展开:关注不同距离维度下目标的分布、目标距离随时间的变化、不同距离下目标的速度、以及特定距离区间内目标的微多普勒信息。本博文将结合数据集来实践一维成像。
Blog
20240226 博文第一次写作
目录
一、雷达一维成像概述
本博文的论述以及后续的数据集都是围绕调频连续波(FMCW)展开。FMCW体制下的测距、测速、测角原理这里不做过多介绍,网上有诸多成熟且十分细节的资料,比如Ti网站上的[1]。
采用FMCW体制的雷达:在车载(雷达)的应用上,在接收器中我们是做去斜接收,接收端是用发射信号进行混频,此时不同的距离对应不同的频点,于是我们对回波数据直接进行FFT操作就可以完成距离压缩,从而实现前述不同距离维度下目标的分布这一成像结果。在各类SAR雷达的应用上,在接收器中我们一般是以载频进行混频,此时对于采集的回波时域数据,我们使用匹配滤波的方法进行距离压缩以达到一维距离成像的效果。 关于不同距离维度下目标的分布(或一维距离像)这是比较容易理解的:如果雷达的距离分辨率足够好,目标将在某段距离区间内有较强的能量分布,如下图所示[2]:
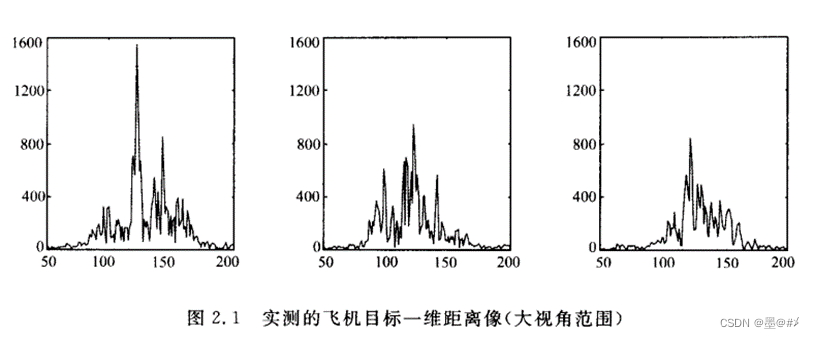
图1.1 不同视角(各图间视角相差15°)下对飞机的以为距离成像结果
上图为对时域数据匹配滤波后的结果,可以看到在目标(飞机)在距离维的分布(局部距离区间内能量更高)。
目标距离随时间的变化:我们只需将每个chirp下距离压缩的结果进行拼接即可(可能比较熟悉车载雷达的同学比较费解:因为车载雷达下chirp周期很短,我们对一帧数据进行距离压缩后,一般来说目标所在的距离门不会发生变化,车载雷达的参数设置下确实如此,不过这里说的是更一般的情况:我们可以把chirp周期拉长、或者选取不同帧下的某个chirp进行实践,就可以看到目标距离随时间的变化:只要目标在动,当然,这里说的动是跨距离门的那种运动,而不是微动:基于Ti-AWR2944雷达开发板的BPM发射与处理实践-CSDN博客)。
不同距离下目标的速度:更专业的术语叫:RD图(距离-多普勒图),我们在距离压缩的基础上再在不同的chirp间(慢时间维度)做一次速度压缩(FFT)即可。
特定距离区间内(目标所在区间)的微多普勒信息:多谱勒信息对应速度,前面不同距离下目标速度是直接在大的慢时间维度进行FFT实现的,但是这样大而泛的处理下我们虽然可以获知有哪些多普勒值(速度值),可是并不知道这些多普勒值随时间的分布情况,这便是微多普勒处理要解决的问题:得到不同时间下的速度信息。微多普勒信息的获取我们一般基于短时傅里叶变换(STFT)来实现,关于STFT和微多普勒信息,读者可以参考[3],该资料介绍得很棒。
除去距离和速度外,还有角度:如果使用MIMO阵列,基于DOA估计方法车载毫米波雷达DOA估计综述-CSDN博客我们还可以获得目标的角度信息,并进而可以得到目标角度随时间的变化关系(成像图),不过后文的数据集没有相关数据,本文不做更深入讨论。
二、成像方法与流程简述
不同距离维度下目标的分布(或一维距离像):FFT或匹配滤波。
目标距离随时间的变化: 对不同chirp下的回波时域数据分别做距离压缩,并拼接(不同的chirp即对应不同的时间)。
不同距离下目标的速度: 距离压缩后再在chirp维度进行速度压缩(2D-FFT)。
特定距离区间内目标的微多普勒信息:
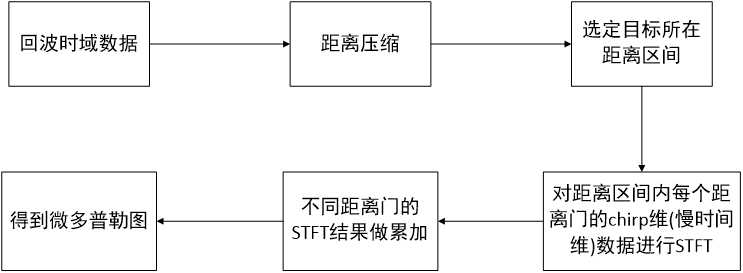
图2.1 典型的微多普勒图获取流程示意图
三、数据集说明
本博文使用了英国格拉斯哥大学(University of Glasgow)的一个数据集(为原始数据集):Radar signatures of human activities - Enlighten Research Data (gla.ac.uk)。该数据集及其相关文章读者可以在前述链接中下载,我在后文的代码链接中也会附上其中一份数据(后文成像实践中所使用的数据)。【当然,数据集的开发主要是为了进行深度学习训练和验证的,不过对原始数据进行成像处理是后续训练的前提,往后有机会我会基于该数据集进行模型训练的实践。】
3.1 数据集基本情况
整个数据集包含了在不同时期以及不同地点所采集的数据。试验人员在试验过程中所做的动作包括:来回走动、坐下、站起、弯腰捡东西、拿杯子喝水、前倾跌倒。整个数据集下载下来后得到如下文件:

图3.1 数据集基本情况说明1
不同的文件夹对应不同的时间下采集的数据,最后一个pdf为数据集的说明(我随附到代码对应的链接中)。每个文件夹包含诸多数据文件,每个数据文件原始数据格式为.dat,如下图所示:
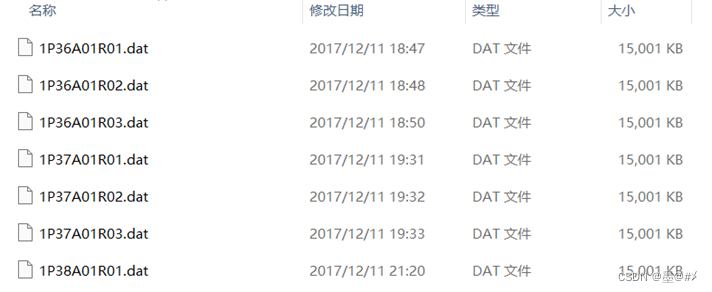
图3.2 数据集基本情况说明2
每个数据文件的名称被编码为该数据的基本信息:
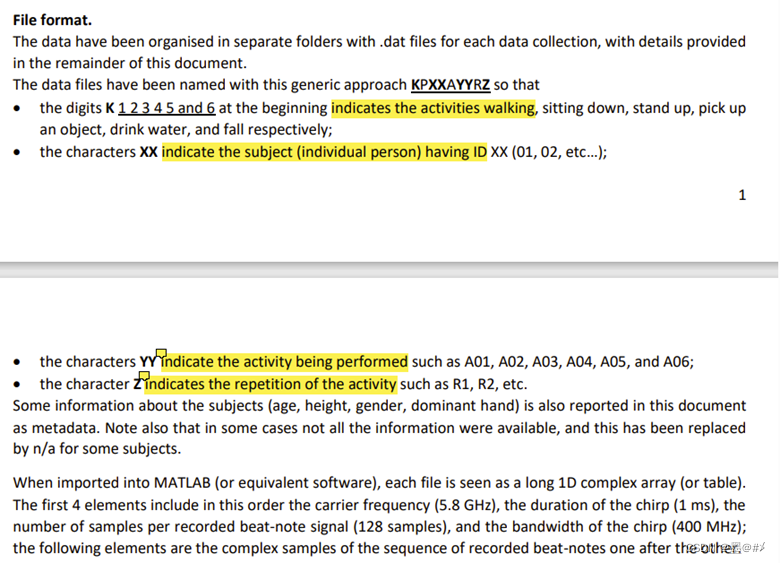
图3.3 数据集基本情况说明3
基于图3.3中的数据说明,我们可以知道:图3.2中1P36A01R01表示:编号为36的人,在试验中做走动这个动作。(从R01-R03可以知道这个动作做了3次)。关于该数据集更细节的说明(诸如试验场景、试验人员的男女,身高等信息读者可以阅读随附的数据集说明)。
3.2 数据解析&雷达参数
雷达以1发1收进行FMCW波形收发。每个数据文件的前4个数据对应雷达的收发参数:包括载波频率、chirp周期、单chirp采样点数、发射带宽。从第五个数据开始为本文件对应的原始时域数据。雷达的参数列表如下:
表3.1 雷达参数列表
| 参数 | 值 |
| 收发天线数 | 1T1R |
| 波形 | FMCW |
| 载波频率 | 5.8GHz |
| Chirp周期 | 1ms |
| 单chirp采样点数(双路采样) | 128 |
| 带宽 | 400MHz |
四、基于数据集的成像实践
本章选取前述数据集中的一份数据(1 December 2017 Dataset文件夹中的:1P36A01R01),并做一维成像实践。该数据经解析后,有10000个chirp。对其进行处理,我把图都放在了一张,得到结果如下:
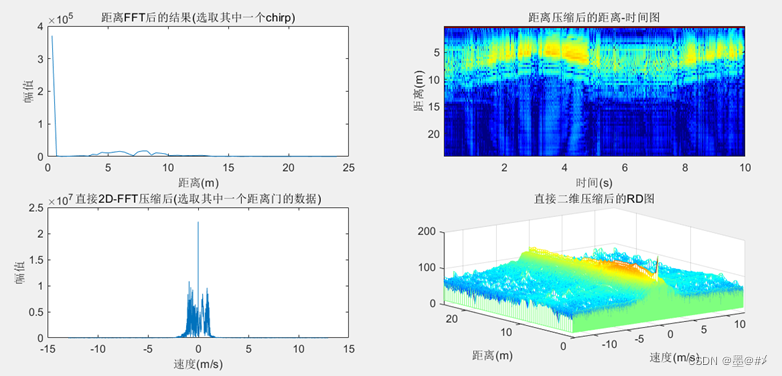
图4.1 基于数据集的一维成像实践结果图1
上图为未经高通滤波的处理结果。
左上角的图即为不同距离维度下目标的分布(或一维距离像),我们对单个chirp下的回波时域数据直接做FFT处理即可得到。从左上角的图来看,信号中有很强的直流信号(在距离接近0处其能量很高!考虑可能是天线耦合、电源性能较差等原因导致),不过还是可以看到在距离为5-10m的区域内有明显高于其它距离区间的能量,可以推断该目标区域即对应为人体所在位置区间。
右上角的图即对应为目标距离随时间的变化图:我们对每个chirp下的回波时域数据都进行FFT处理并做拼接即可得到。可以看到随着时间的变化目标所在的距离区间是在移动的:这与本试验的试验过程是吻合的,即人来回走动。
右下角的图即对应为不同距离下目标的速度图(或RD图),通过对前述距离压缩的结果再进行全chirp维度下的速度压缩得到,如前所述,此时我们只知道在不同的距离下包含了哪些速度信息,但是无法获取不同时间下的速度信息!此外,从右上角的图来看,因为目标所在的距离区间已经发生了变化,所以我们直接在整个时间区间进行速度压缩其实已没有多大意义。左下角的图中选取了其中一个距离门并观察该距离门下的目标速度分布。
更进一步地,为了消除直流信号以及静态杂波的影响,方便更清晰地观察目标多普勒信息,这里对距离压缩后的数据在chirp维度进行高通滤波(使用数字滤波器)处理,并舍去距离门为1的数据。得到结果如下:
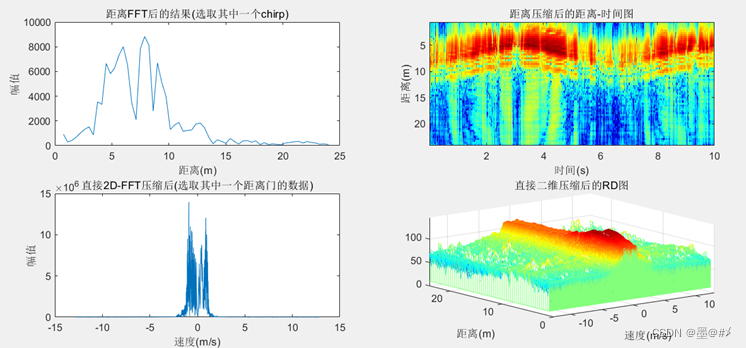
图4.2 基于数据集的一维成像实践结果图2(高通滤波后)
对比图4.1,可以看到图像变得更清晰了(目标所在位置区间的对比度更大)。后续的微多普勒图的获取是基于高通滤波后的距离压缩数据。按照第二章图2.1所示的处理流程,将距离区间设置为:3.75m-11.25m之间,观察该区间内速度随时间的变化情况。
短时(离散)傅里叶变换本质上就是在chirp维度(速度维度)进行分段傅里叶变换,为确保连续性,我们一般会设置使得每个分段之间有一些重叠的部分。所以短时傅里叶变换过程中的两个重要参数是:每个分段的区间大小、前后区间的重叠大小。(所选区间的大小会影响速度分辨率!区间越大速度分辨率越高但同时短时傅里叶变换的效果会变差:就不那么短时了.)
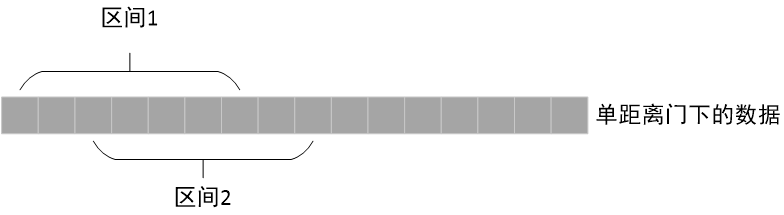
图4.3 STFT处理示意图
如上图所示,以此类推,对每个区间分别进行FFT处理并将处理的结果拼接成一个矩阵,便可得到一个距离门下的瞬时傅里叶变换结果。我们对所选取的每个距离门下的数据分别进行瞬时傅里叶变换处理,并对得到的各个矩阵进行累加就可以得到微多普勒图。本数据的处理结果如下:
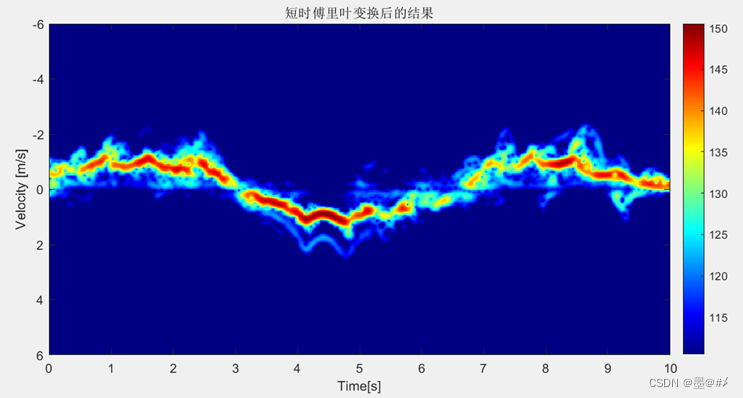
图4.4 微多普勒处理结果
从该图中我们可以知道在实验过程中目标是在做相对雷达的来回运动(速度由负变正在边负)。此外,微多普勒图内含了(可以表征)更丰富(细节)的信息,如:人体躯干的运动、不同的运动状态等等,我们可以籍此做各种目标分类与识别的研究(不过这些不在本文的讨论范围)。
五、总结
本博文探讨一维成像,并介绍了一份内容非常全面且丰富的原始数据集,基于该数据集实践了几种一维成像方法。因为一维成像的数学原理相对简单且成熟,网上有诸多资料,本博文并没有涉及太多的理论/公式推导。本博文的工作为后续更高维度的成像方法研究以及基于数据集的深度学习模型训练等提供了基础,后续有机会我会出基于该数据集更多的思考和探讨。
六、参考资料
[1] mmWave radar sensors | TI.com
[2] 保铮,刑孟道,王彤.雷达成像技术[M].电子工业出版社,2005.
[3] 形象易懂讲解算法I——小波变换 - 知乎 (zhihu.com)


















 7071
7071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











